1.地心惯性坐标系ECI (Earth-Centered Inertial Frame)
惯性坐标系是指相对于宇宙的其他部分而言没有加速度和转动的坐标系。它是描述位置,速度,加速度,姿态和角速度之间的数学关系。惯性传感器测量的是相对惯性坐标系的运动.在惯性系中算出的姿态,位置,速度后,投影到当地导航坐标系。
地心惯性坐标系不随地球的转动而转动.

2.地心地固坐标系ECEF(Earth-Centered Earth-Fixed Frame)

ECEF和ECI的相同点和区别点:
(1).原点相同(都是地球质心)
(2).Z轴相同
(3).ECI的x,y轴是固定的,不随地球自转而转动,而ECEF的x,y轴相反
3.当地导航坐标系(Local Navigation Frame)
当地导航系相对地球是运动的.导航坐标系的原点和它的坐标轴随载体的运动变化而变化的.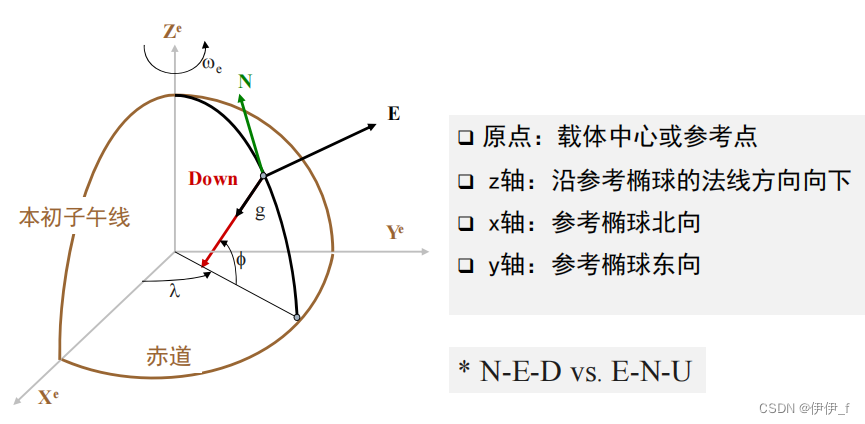
北-东-地(N-E-D) vs. 东-北-天(E-N-U)
常用是N-E-D
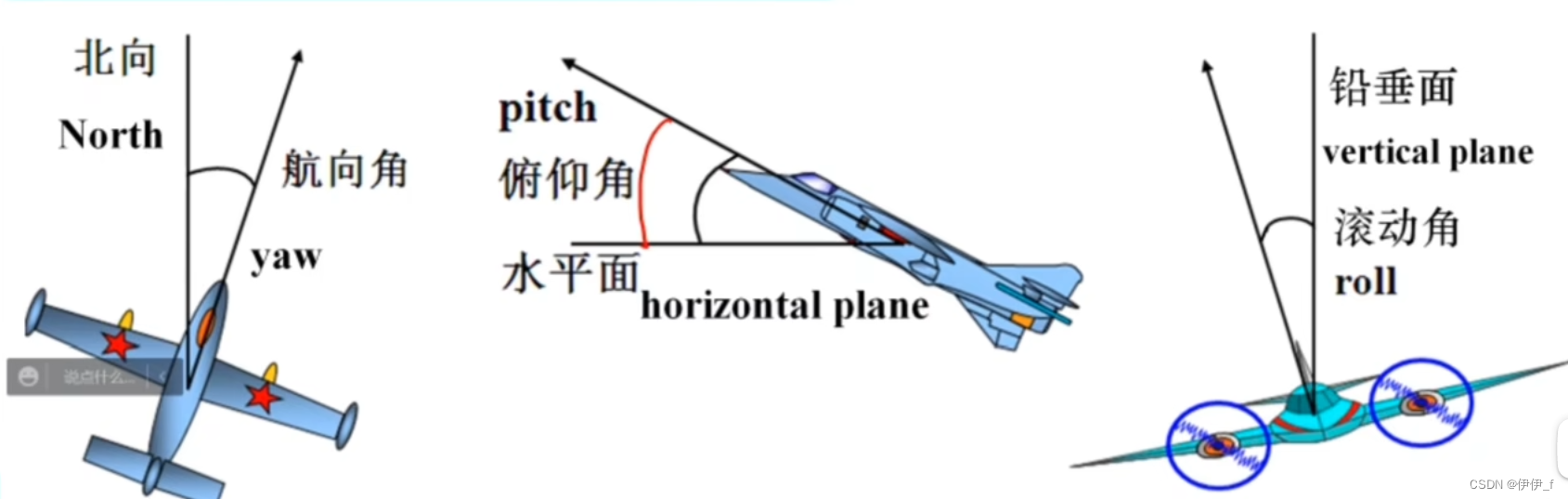
导航坐标系提供 相对于 北向,东向和垂直方向的姿态.比如航向角(yaw)45度是指相对于北向的夹角. 导航坐标系表示载体的姿态,速度比较方便
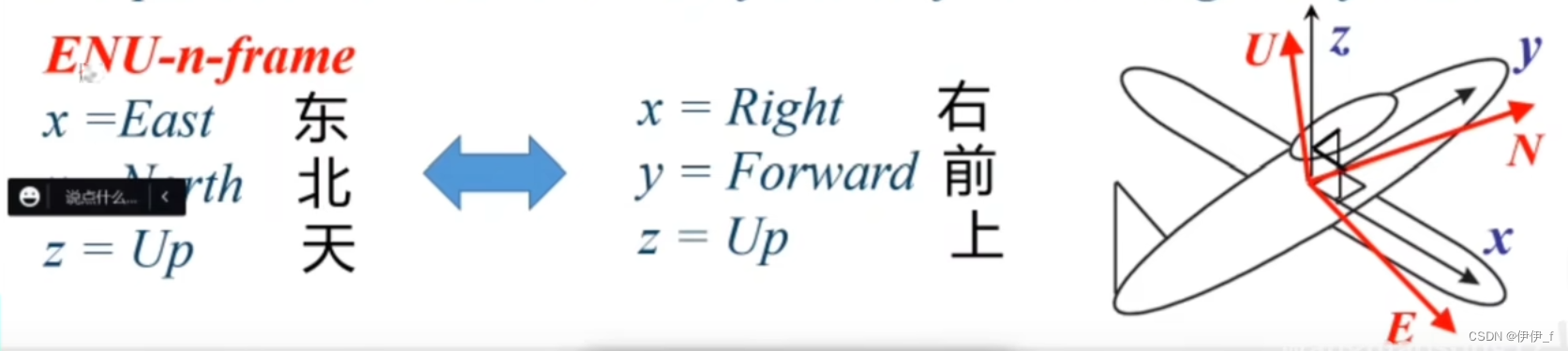
4.载体坐标系(b系/Body Frame/Vehicle Frame)

载体坐标系和导航坐标系对应关系
5.坐标系之间的转换方法
5.1余弦矩阵法
5.2欧拉角法