一、简介
近年来,微小型四翼无人机已经成为了无人飞行器研究领域的一个热点。它结构简单、机动性强、便于维护,能够在空中悬停、垂直起飞和降落。在军用和民用方面具有较大的潜在应用价值,国内外许多研究单位纷纷致力于四旋翼无人机飞行控制的架构设计与飞行控制研究,以实现四旋翼无人机的自主飞行。机载传感器系统是四旋翼无人机飞行控制系统的重要组成部分,它为机载控制系统提供可靠的飞行状态信息,是实现四旋翼无人机自主飞行的重要设备。

现在无人机应用最广的是倾斜摄影技术优势或者说最吸引用户的,就是利用倾斜摄影技术可以全自动、高效率、高精度、高精细的构建地表全要素三维模型。
二、四旋翼无人机特点
1、机动性能灵活,低空性能出色。能在城市、森林等复杂环境下完成各种任务。可完成空中悬停监视侦查。实现对动力要地低,能在狭小空间穿行,能垂直起降,对起降环境要求低。
2、对动力要求较小,产生的噪音低,隐蔽性能高,安全性能出色。四旋翼无人机采用四个马达提供动力,可使飞行更加稳定和精确。
3、结构简单,运行、控制原理相对容易掌握。
4、成本较低,零件容易更换,维护方便。
三、飞行软件
目前无人机种类繁多,针对无人机开发的飞控软件也有很多,目前比较好用的是DJI GS Pro、DJI GO4、Litchi Vue、Pix4d等。
四、数据采集,使用DJI GS pro
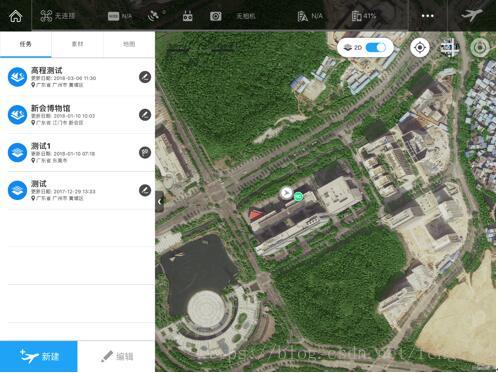
1、打开DJI GS pro软件,点击新建任务
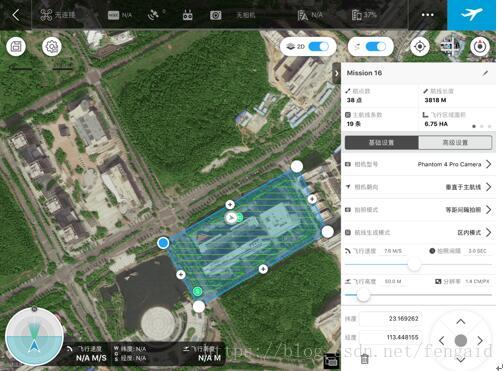
2、点击测绘航拍区域模式

3、点击地图选点(飞行定点比较耗飞机电量,无特殊情况建议不使用)

4、点击屏幕就会出现一个航测区域,手动拖拽四个定点可以改变航测的面积和形状,同时也可以手动增加拐点,让航测面积更加的灵活多样。并且在右边的菜单栏里选择好对应的云台相机;设置好任务的高度,任务的高度和拍摄的清晰度,成图的分辨率有很大的关系;大面积的时候尽量选择等时间拍照,因为能上传的航点是有限的。
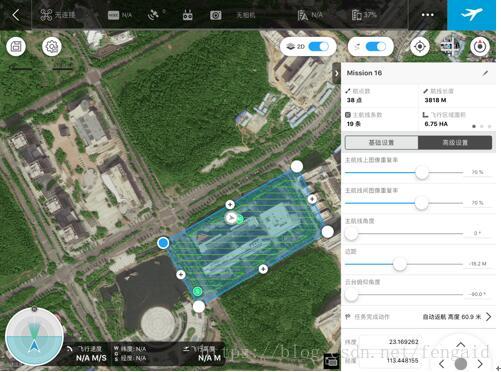
5、点击进入右侧菜单的高级选项之中,重新设置一下航测的重叠了,一般航向和旁向重叠率是70%和70%(最好不要低于70%);设置好云台俯仰角,正射影像图一般为-90°,拍摄3D立体时一般为-45°;设置好返航高度,确保返航时不会碰撞到障碍物。
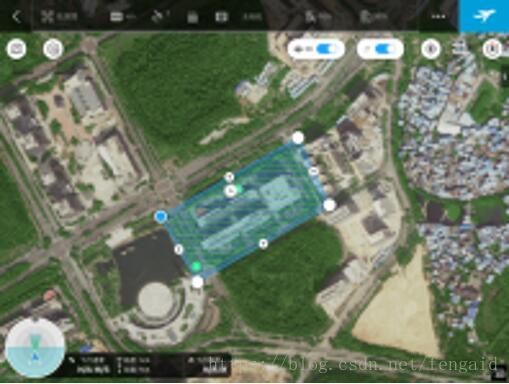
6、点击右上角飞机左边更多选项,点击高级设置(地图优化限中国大陆地区使用打开);这点也是最关键的一点,这时候一定要点开中国大陆这个选项,不然飞行器的位置是偏移的。会导致航测任务区域整体偏移,有一部分任务没有拍摄到。

7、检查任务没有问题后,点击右上角的飞机按钮,程序开始上传任务和自检,通过后就可以点击飞行了。
8、整个任务过程都是全自动的,包括起降,任务完成后,左边菜单的任务变成一个旗子的标志证明任务已经完成。

五、数据上转
当我们采集好数据后,需要上传建模,可以登录 “如初三维重建”平台,免费注册个账号,就可以开始上传建模了,因为我发现这个平台很好用,建模时,只需要三个步骤,无需认为过多的调参数(不像smart3D和photoscan那么复杂),模型效果也比较好。当模型建好后,还可以分享至朋友圈,让朋友们也可以观看自己的作品,所以飞友们可以试一下。
- 建立项目名称

- 上传照片

- 照片上传完后,点击开始建模

完成这三个步骤后,等待模型出来就可以了,即不占计算机资源,又简单方便。我说的这些,但愿能帮你们解决到建模的难点。