特殊的J1939信息(车辆控制)
>pgn0 - TSC1
>pgn65226 -DM1
>pgn60160 & pgn60471 – TP.BAM
pgn0 - TSC1 扭矩/速度控制
TSC1 允许三种方式控制发动机:
- 扭矩控制 (0% -> 100%)
- 速度控制 (低怠速 ->高怠速)
- 扭矩/速度限制(两者之中的低者)
例如:1、变速箱在换档时会利用此命令控制发动机转速;
2、车辆控制器利用此命令控制发动机转速;
3、牵引控制器利用此命令控制发动机的扭矩来防止车辆打滑
pgn0 -Torque/Speed Control #1 - TSC1 -
Transmission Repetition Rate: when active; 10 ms to engine, 50ms toretarder
Data Length: 8 bytes
Data Page: 0
PDU Format: 0
PDU Specific: DA
Default Priority: 3
Parameter Group Number: 0 ( 00000016 )
Bit Start Position /Bytes Length SPNDescription SPN
1.1 2 bits OverrideControl Mode 695
1.3 2 bits RequestedSpeed Control Conditions 696
1.5 2 bits OverrideControl Mode Priority 897
2-3 2 bytes RequestedSpeed/Speed Limit 898
4 1 byte RequestedTorque/Torque Limit 518
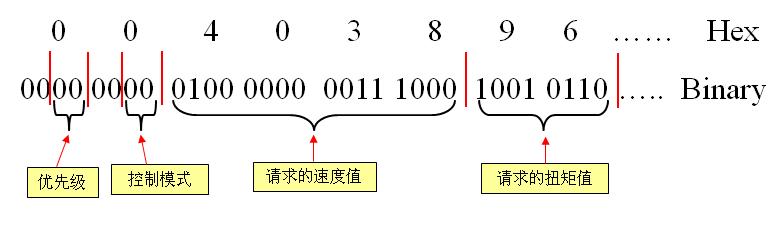
数据域举例如下:
相应SPN介绍
SPN695 - Override Control Mode
00 – Override disable
01 – Speed Control – Governs to a desiredSpeed
10 – Torque Control – Maintains a desired Torque value
11 – Speed/Torque Limit Control – Controls to the lowest value.
SPN897 -Override Control Mode Priority
00 – Highest Priority
01 – High Priority
10 – Medium Priority
11 – Low Priority
SPN696 - Requested Speed Control Conditions
Basedon these bits (bits 4,3 in byte 1) up to Four (4) different ASGgainsets can be applied DYNAMICALLY.
00 =Gainset 1
01 =Gainset2
10 =Gainset 3
11 =Gainset 4
This can be a significant advantage when the TSC1 is being used in speed control toaccomplish the application’s intended function.
Ex: Improve load pickup during loadedoperations and then switch to differentgainsetfor stability during light loading.
spn898- Requested Speed/Speed Limit -
This is the engine speed which the engine is expected to operate at ifthe speed control mode is active or the engine speed which the engine is not expected to exceed if the speed limit mode is active.
Data Length: 2bytes
Resolution: 0.125 rpm/bit , 0 offset
Data Range: 0 to 8,031.875 rpm
Type: Status
Suspect Parameter Number: 898
Parameter Group Number: [0] ->PGN No from previous slide
Asthis is an SPN, don’t forget to Byte Swap when converting hence 0100 0000 0011 1000 swapped is 0011 100001000000
To convert information
Hence: 00111000 0100 0000 = 38 40h
Convert to Dec: 3840h = 14400 Dec
Multiply by 0.125: 14400x 0.125 = 1800
Add 0: 1800 + 0 =1800
Result: 1800 rpm
spn518-Requested Torque/Torque Limit - This is the engine torque at which the engine is expected to operate ifthe torque control mode is active or the engine torque which the engine is notexpected to exceed if the torque limit mode is active.
Data Length: 1 byte
Resolution: 1 %/bit , -125 % offset
Data Range: -125 to 125 %
Operating Range: 0 to 125% engine torquerequests
Type: Status
Suspect Parameter Number: 518
Parameter Group Number: [0] ->PGN No from previous slide
Hence: 10010110 = 96h
Convert to Dec: 96h = 150 Dec
Multiply by 1: 150x 1 = 150
Add -125: 150 -125 = 25
Result: 25% TQ
特殊的J1939信息(车辆控制)
>pgn0 - TSC1
>pgn65226 -DM1
>pgn60160 & pgn60471 – TP.BAM
pgn0 - TSC1 扭矩/速度控制
TSC1 允许三种方式控制发动机:
- 扭矩控制 (0% -> 100%)
- 速度控制 (低怠速 ->高怠速)
- 扭矩/速度限制(两者之中的低者)
例如:1、变速箱在换档时会利用此命令控制发动机转速;
2、车辆控制器利用此命令控制发动机转速;
3、牵引控制器利用此命令控制发动机的扭矩来防止车辆打滑
pgn0 -Torque/Speed Control #1 - TSC1 -
Transmission Repetition Rate: when active; 10 ms to engine, 50ms toretarder
Data Length: 8 bytes
Data Page: 0
PDU Format: 0
PDU Specific: DA
Default Priority: 3
Parameter Group Number: 0 ( 00000016 )
Bit Start Position /Bytes Length SPNDescription SPN
1.1 2 bits OverrideControl Mode 695
1.3 2 bits RequestedSpeed Control Conditions 696
1.5 2 bits OverrideControl Mode Priority 897
2-3 2 bytes RequestedSpeed/Speed Limit 898
4 1 byte RequestedTorque/Torque Limit 518
数据域举例如下:
相应SPN介绍
SPN695 - Override Control Mode
00 – Override disable
01 – Speed Control – Governs to a desiredSpeed
10 – Torque Control – Maintains a desired Torque value
11 – Speed/Torque Limit Control – Controls to the lowest value.
SPN897 -Override Control Mode Priority
00 – Highest Priority
01 – High Priority
10 – Medium Priority
11 – Low Priority
SPN696 - Requested Speed Control Conditions
Basedon these bits (bits 4,3 in byte 1) up to Four (4) different ASGgainsets can be applied DYNAMICALLY.
00 =Gainset 1
01 =Gainset2
10 =Gainset 3
11 =Gainset 4
This can be a significant advantage when the TSC1 is being used in speed control toaccomplish the application’s intended function.
Ex: Improve load pickup during loadedoperations and then switch to differentgainsetfor stability during light loading.
spn898- Requested Speed/Speed Limit -
This is the engine speed which the engine is expected to operate at ifthe speed control mode is active or the engine speed which the engine is not expected to exceed if the speed limit mode is active.
Data Length: 2bytes
Resolution: 0.125 rpm/bit , 0 offset
Data Range: 0 to 8,031.875 rpm
Type: Status
Suspect Parameter Number: 898
Parameter Group Number: [0] ->PGN No from previous slide
Asthis is an SPN, don’t forget to Byte Swap when converting hence 0100 0000 0011 1000 swapped is 0011 100001000000
To convert information
Hence: 00111000 0100 0000 = 38 40h
Convert to Dec: 3840h = 14400 Dec
Multiply by 0.125: 14400x 0.125 = 1800
Add 0: 1800 + 0 =1800
Result: 1800 rpm
spn518-Requested Torque/Torque Limit - This is the engine torque at which the engine is expected to operate ifthe torque control mode is active or the engine torque which the engine is notexpected to exceed if the torque limit mode is active.
Data Length: 1 byte
Resolution: 1 %/bit , -125 % offset
Data Range: -125 to 125 %
Operating Range: 0 to 125% engine torquerequests
Type: Status
Suspect Parameter Number: 518
Parameter Group Number: [0] ->PGN No from previous slide
Hence: 10010110 = 96h
Convert to Dec: 96h = 150 Dec
Multiply by 1: 150x 1 = 150
Add -125: 150 -125 = 25
Result: 25% TQ