原文地址:https://blog.csdn.net/qq_25247589/article/details/62892140
首先一定要好好看看引脚图
- +-----+-----+---------+------+---+---Pi 3---+---+------+---------+-----+-----+
- | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
- +-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
- | | | 3.3v | | | 1 || 2 | | | 5v | | |
- | 2 | 8 | SDA.1 | ALT0 | 1 | 3 || 4 | | | 5V | | |
- | 3 | 9 | SCL.1 | ALT0 | 1 | 5 || 6 | | | 0v | | |
- | 4 | 7 | GPIO. 7 | IN | 1 | 7 || 8 | 1 | ALT5 | TxD | 15 | 14 |
- | | | 0v | | | 9 || 10 | 1 | ALT5 | RxD | 16 | 15 |
- | 17 | 0 | GPIO. 0 | OUT | 0 | 11 || 12 | 0 | IN | GPIO. 1 | 1 | 18 |
- | 27 | 2 | GPIO. 2 | IN | 0 | 13 || 14 | | | 0v | | |
- | 22 | 3 | GPIO. 3 | IN | 0 | 15 || 16 | 0 | IN | GPIO. 4 | 4 | 23 |
- | | | 3.3v | | | 17 || 18 | 0 | IN | GPIO. 5 | 5 | 24 |
- | 10 | 12 | MOSI | ALT0 | 0 | 19 || 20 | | | 0v | | |
- | 9 | 13 | MISO | ALT0 | 0 | 21 || 22 | 0 | IN | GPIO. 6 | 6 | 25 |
- | 11 | 14 | SCLK | ALT0 | 0 | 23 || 24 | 1 | OUT | CE0 | 10 | 8 |
- | | | 0v | | | 25 || 26 | 1 | OUT | CE1 | 11 | 7 |
- | 0 | 30 | SDA.0 | IN | 1 | 27 || 28 | 1 | IN | SCL.0 | 31 | 1 |
- | 5 | 21 | GPIO.21 | IN | 1 | 29 || 30 | | | 0v | | |
- | 6 | 22 | GPIO.22 | IN | 1 | 31 || 32 | 0 | IN | GPIO.26 | 26 | 12 |
- | 13 | 23 | GPIO.23 | IN | 0 | 33 || 34 | | | 0v | | |
- | 19 | 24 | GPIO.24 | IN | 0 | 35 || 36 | 0 | IN | GPIO.27 | 27 | 16 |
- | 26 | 25 | GPIO.25 | IN | 0 | 37 || 38 | 0 | IN | GPIO.28 | 28 | 20 |
- | | | 0v | | | 39 || 40 | 0 | IN | GPIO.29 | 29 | 21 |
- +-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
- | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
- +-----+-----+---------+------+---+---Pi 3---+---+------+---------+-----+-----+
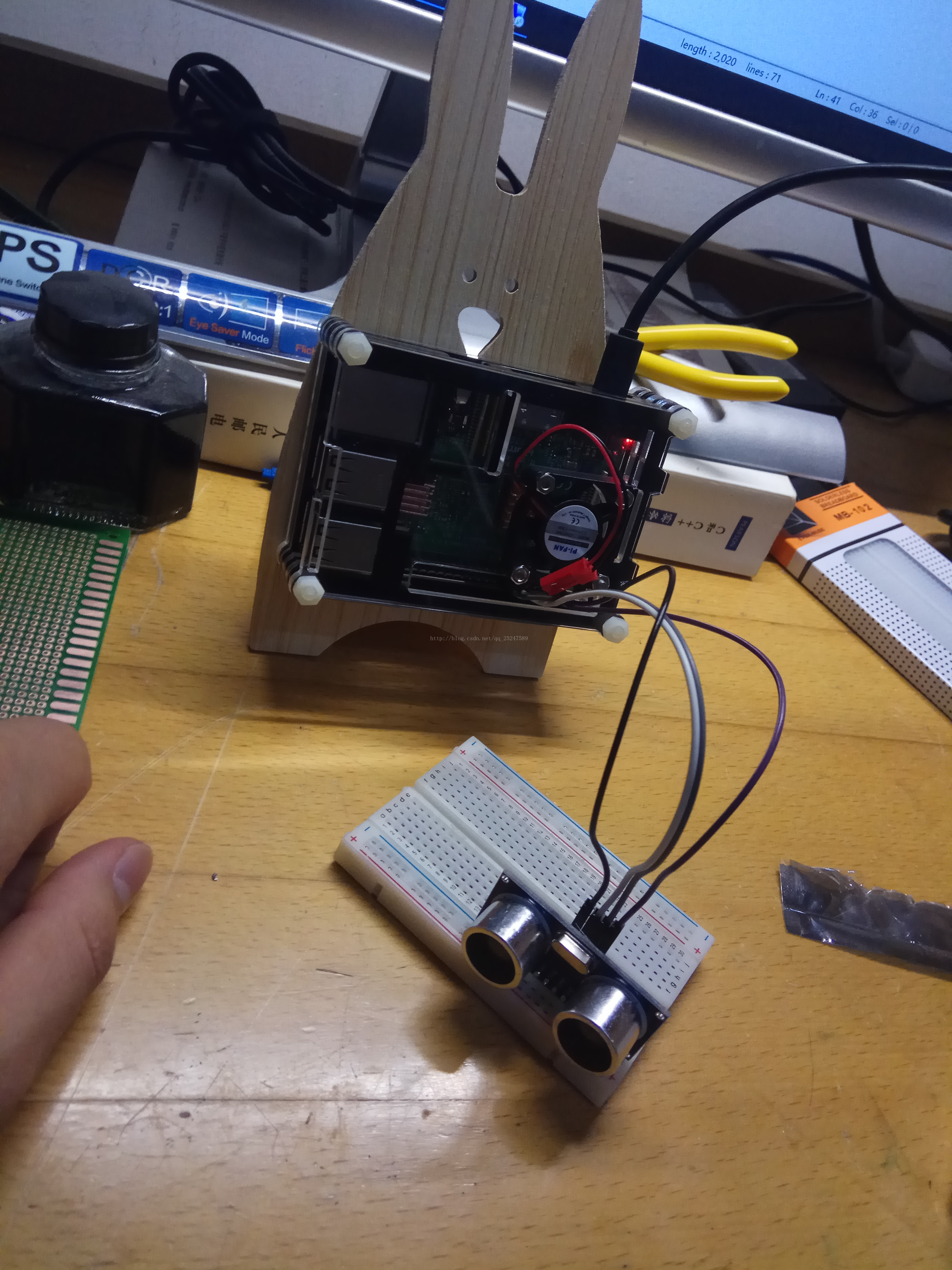
这次用的是超声波测距模块(昨天焊接小灯泡的时候不小心把led点断了 没得用了 远离焊接 珍爱生命)
首先接好管脚 先来看看这个模块 某宝上几块钱一个

总之四个脚 上下两个是5V和接地的 第二个是输出管脚 就是你给一个高电平就发送一段声波 第三个是接收端
接下来是代码部分 和上次的编译是一样的
- #include <wiringPi.h>
- #include <stdio.h>
- #include <sys/time.h>
- #define Trig 4
- #define Echo 5
- void ultraInit(void)
- {
- pinMode(Echo, INPUT); //设置端口为输入
- pinMode(Trig, OUTPUT); //设置端口为输出
- }
- float disMeasure(void)
- {
- struct timeval tv1; //timeval是time.h中的预定义结构体 其中包含两个一个是秒,一个是微秒
- /*
- struct timeval
- {
- time_t tv_sec; //Seconds.
- suseconds_t tv_usec; //Microseconds.
- };
- */
- struct timeval tv2;
- long start, stop;
- float dis;
- digitalWrite(Trig, LOW);
- delayMicroseconds(2);
- digitalWrite(Trig, HIGH);
- delayMicroseconds(10); //发出超声波脉冲
- digitalWrite(Trig, LOW);
- while(!(digitalRead(Echo) == 1));
- gettimeofday(&tv1, NULL); //获取当前时间 开始接收到返回信号的时候
- while(!(digitalRead(Echo) == 0));
- gettimeofday(&tv2, NULL); //获取当前时间 最后接收到返回信号的时候
- /*
- int gettimeofday(struct timeval *tv, struct timezone *tz);
- The functions gettimeofday() and settimeofday() can get and set the time as well as a timezone.
- The use of the timezone structure is obsolete; the tz argument should normally be specified as NULL.
- */
- start = tv1.tv_sec * 1000000 + tv1.tv_usec; //微秒级的时间
- stop = tv2.tv_sec * 1000000 + tv2.tv_usec;
- dis = (float)(stop - start) / 1000000 * 34000 / 2; //计算时间差求出距离
- return dis;
- }
- int main(void)
- {
- float dis;
- if(wiringPiSetup() == -1){ //如果初始化失败,就输出错误信息 程序初始化时务必进行
- printf("setup wiringPi failed !");
- return 1;
- }
- ultraInit();
- while(1){
- dis = disMeasure();
- printf("distance = %0.2f cm\n",dis);
- delay(1000);
- }
- return 0;
- }
扫描二维码关注公众号,回复:
28075 查看本文章

运行结果如下
还是挺精确的

PS:以上代码借鉴了csdn上一个前辈的
关于wiringPi的函数库
官方的在这里https://projects.drogon.net/raspberry-pi/wiringpi/functions/
还有一个前辈翻译了一部分的
- API函数英文网页 :https://projects.drogon.net/raspberry-pi/wiringpi/functions/
- BCM2835芯片手册 :https://github.com/raspberrypi/documentation/blob/master/hardware/raspberrypi/bcm2835
- wiringPi库下载地址 : https://git.drogon.net/?p=wiringPi;a=summary
- wiringPi库Git地址 : git://git.drogon.net/wiringPi
- 在使用wiringPi库之前,你需要包含头文件:
- #include <wiringPi.h>
- 依赖你正在使用的系统环境你需要增加 -I/usr/local/include -L/usr/local/lib -lwiringPi 在使用命令行的时候编译你的程序,最重要的是-lwiringPi。
- 设置函数(Setup Functions)
- 这里有3中方式来初始化wiringPi。
- int wiringPiSetup (void) ;
- int wiringPiSetupGpio (void) ;
- int wiringPiSetupSys (void) ;
- 在你程序开始的时候必须调用其中一个设置函数,如果返回-1则初始化GPIO失败,然后你应该查阅全局错误代码去看为什么会失败。
- 下面是几个设置函数的区别:
- wiringPiSetup(void) ;
- 这个设置函数初始化wiringPi系统,假定当前程序将要使用wiringPi引脚编号方案,这是一个简单的编号方案,它提供了将虚拟引脚编号0~16映射到实际的Broadcom GPIO引脚编号。查看pins page图表来了解wiringPi引脚编号、Broadcom GPIO引脚编号和树莓派板子的边缘连接器物理位置的映射情况。
- 这个函数需要root权限才能调用。
- wiringPiSetupGpio(void) ;
- 这个函数与上面那个函数相同,然而它允许当前程序不重新映射直接地使用Broadcom GPIO引脚编号。
- 和上面一样,这个函数也需要root权限才能调用。
- wiringPiSetupSys(void)
- 这个函数初始化wiringPi系统,但是它用的是/sys/class/gpio接口而不是直接的访问硬件。它可以被非root用户调用,提供的GPIO引脚必须在事先使用gpio命令导出。在这种模式下的引脚编号是原生的Broadcom GPIO引脚编号。
- 注意:在这种模式下你仅仅能够使用通过/sys/class/gpio接口导出的引脚。在你调用你的程序之前你必须导出这些引脚。
- 你可以通过一个单独的shell脚本来做这件事,或者在你的程序中使用system()函数。
- 还需要注意的是一些函数(下面列出的)在使用这种模式的时候是无效的,它们可能不能在非root权限的情况下进行操作。
- 一般wiring函数(General wiring functions)
- void pinMode (int pin, int mode) ;
- 这个函数设置引脚的模式为INPUT、OUTPUT或者PWM_OUTPUT.注意仅仅wiringPi引脚1(BCM_GPIO 18)支持PWM输出,
- 引脚的编号可以从pins table中获得。
- 这个函数在系统模式( Sys mode)下无效。
- void digitalWrite (int pin, int value) ;
- 向给出的引脚写HIGH或者LOW(1 or 0)值,并确保该引脚在之前已经被设置成输出模式。
- void digitalWriteByte (int value) ;
- 这个函数写8位字节到8个GPIO引脚,最快的方式是马上设置所有8位字节成一个特定的值,尽管它仍然需要对GPIO硬件进行了两次写操作。
- void pwmWrite (int pin, int value) ;
- 向给出引脚的PWM寄存器写value值,value的值必须在0~1024之间。(再次注意,仅仅pin1(BCM_GPIO18)支持PWM)
- 这个函数在系统模式( Sys mode)下无效。
- int digitalRead (int pin) ;
- 这个函数返回读取pin引脚所获得的值,这个值将会是HIGH或者LOW(1 or 0)取决于改pin的逻辑电平。
- void pullUpDnControl (int pin, int pud) ;
- 这个函数将给出的引脚设置成上拉或者下拉电阻模式,引脚必须设置成输入模式。和Arduino不同,BCM2835
- 同时有用上拉和下拉内部电阻器。pud参数应该是;PUD_OFF(没有上拉或下拉),PUD_DOWN(下拉),PUD_UP(上拉到3.3V)。
- 这个函数在Sys模式下无效,如果你需要启动一个上拉或者下拉,你可以在你开始运行程序前在一个脚本中使用gpio命令来完成。
- PWM控制(PWM Control)
- 当系统运行在Sys模式下的时候PWM不能被控制。
- pwmSetMode (int mode) ;
- PWM发生器可以以两种模式工作-"平稳模式"和"mark:space"。mark:space模式时传统的,然而
- PI的默认模式时平稳模式。你可以通过提供 PWM_MODE_BAL 或者 PWM_MODE_MS 参数来切换模式。
- pwmSetRange (unsigned int range) ;
- 这个函数设置了PWM发生器的寄存器的范围,默认是1024。
- pwmSetClock (int divisor) ;
- 这个函数用于设置PWM时钟的分频数。
- 你需要阅读Broadcom ARM 外设数据手册来了解更多关于PWM系统的信息。
- 定时函数(Timing functions)
- unsigned int millis (void)
- 这个函数返回一个数据,这个数据代表了从你的程序调用wiringPiSetup函数开始到当前所经历的毫秒数,它返回一个32位无符号数which wraps after 49 days。
- void delay (unsigned int howLong)
- 这个函数会导致程序执行暂停至少howLong毫秒,由于linux多任务的特性可能会更长。注意最大的延时时间是一个32位无符号整数或者大约为49天。
- void delayMicroseconds (unsigned int howLong)
- 这个函数会导致程序执行暂停至少howLong微秒,由于linux多任务的特性可能会更长。注意最大的延时时间是一个32位无符号整数微秒或者大约为71分钟。
- 程序/线程优先级(Program/Thread Priority)
- int piHiPri (int priority) ;
- 中断(Interrupts)
- 拥有一个更新了GPIO中断处理代码补丁的内核(也就是在2012年7月以后的内核),你现在就可以在你的程序
- 中等待中断的发生。这个功能在你等待中断发生的时候释放处理器去做其它任务。GPIO口可以产生的中断输入信号
- 有上升沿、下降沿或者两者都有。
- 注意:2013年1月:waitForInterrupt()函数已经被弃用了,你应该使用下面这个更新更简单的wiringPiISR() 函数。
- int waitForInterrupt (int pin, int timeOut) ;
- 当被调用的时候,你的程序会被挂起来等待该引脚有中断事件的发生。 timeOut 参数给入的是毫秒值,或者可以设置成-1当需要永久的等待的时候。
- 返回值是-1意味着发生了错误(errno会相应的被设置),是0如果超时,是1代表了成功检测到了的一个中断事件。
- 在调用waitForInterrupt之前,你首先必须初始化GPIO引脚,目前唯一能够做这件事的方式是使用gpio命令,也可以在一个脚本中,或者在你的程序中使用system()。
- 举例来说我们想要在GPIO引脚0上等待一个下降沿中断,因此要设置硬件,我们需要运行:
- gpio edge 0 falling
- 在运行程序之前。
- int wiringPiISR (int pin, int edgeType, void (*function)(void)) ;
- 这个函数在特殊的引脚上注册一个函数来接收中断,edgeType参数是INT_EDGE_FALLING、INT_EDGE_RISING,INT_EDGE_BOTH or INT_EDGE_SETUP中的一个。如果它是INT_EDGE_SETUP,则不会有初始化引脚的操作发生-它假定你已经在别处设置了引(例如 使用gpio命令),但是如果你指定了其它类型中的一种,然后这个引脚就会按照规定被导出和初始化。它通过合适的调用gpio通用命令来实现,因此它应该被使用。
- 引脚编号由当前的模式提供-native wiringPi, BCM_GPIO or Sys 模式。
- 这个函数(wiringPiISR )可以在任何模式下工作,没必要获取root权限来工作。
- 当中断触发的时候function函数就会被调用,当它已经被触发了,在调用function函数之前它会在调度程序中被清除,因此如果在你处理完成(这次中断)之前一个后续的中断发生,然后它(后续的中断)不会被丢失。(不管怎样,它仅仅能够监测再多一个中断,它们(中断)会被忽略如果在一个中断正在被处理的时候又有不只一个中断发生)。
- 这个函数可以在高优先级别下运行(如果程序使用sudo运行或者在root权限下),与主程序同时执行。它能够完全访问所有的全局变量,打开文件句柄等等。
- 通过查看 isr.c例程来了解更多详细的内容和怎么去使用这些特性。
- 并行处理(Concurrent Processing (multi-threading))
- int piThreadCreate (name) ;
- piLock (int keyNum) ;
- piUnlock (int keyNum) ;
- 混杂函数(Misc. Functions)
- piBoardRev (void) ;
- wpiPinToGpio (int wPiPin) ;
- setPadDrive (int group, int value) ;
- -----------------------------------------------------------------------------------------------------------------
- 本文属于本人原创文章,转载请注明出处:http://blog.csdn.net/a656343072/article/details/41209857
- 本人英文水平有限,欢迎指正错误。
- --huangzhigang
- -----------------------------------------------------------------------------------------------------------------