by luoshi006
上接【互补滤波器】,继续学习互补滤波。。。。
参考:
Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs.
PX4/Pixhawk—uORB深入理解和应用
应用场景
本文中 mahony 的应用场景为 多旋翼无人机的姿态估计。
陀螺仪、加速度计、MPU6050 详述,请参考:传送门
名词解释
陀螺仪
陀螺仪,测量角速度,具有高动态特性,它是一个间接测量角度的器件。它测量的是角度的导数,即角速度,要将角速度对时间积分才能得到角度。由于噪声等误差影响,在积分作用下不断积累,最终导致陀螺仪的低频干扰和漂移。
加速度计
输出当前加速度(包含重力加速度 )的方向【也叫重力感应器】,在悬停时,输出为 。由其测量原理导致的高频信号敏感,使得加速度计在振动环境中高频干扰较大。
磁力计
输出为当前机体与地磁场的夹角。测量原理与指南针相似。低频特性较好,易受周围磁场干扰。
磁力计的工作原理参考:WalkAnt的博客
坐标系
导航坐标系:在多旋翼中,又叫地球坐标系、地理坐标系。通常,采用北东地(NED)构成坐标系的 轴。
机体坐标系 :固联在多旋翼飞行器上,即,坐标系原点定位于飞行器中心点(假设中心点与重心点重合)。
关于航空导航用到的坐标系,请参考 AIAA 系列丛书。在多旋翼中,因为只在低空飞行,且时间较短,只需要以上两个。
姿态表示
欧拉角 :较直观,描述刚体在三维欧式空间中的姿态。此时,坐标系为机体坐标系,随着刚体的旋转而旋转。缺点:万向节锁。
详情参加:Wikipedia 传送门
四元数:由一组四维向量,表示刚体的三维旋转。适合用于计算机计算。
详情参加:Wikipedia 传送门
方向余弦矩阵DCM:用欧拉角余弦值或四元数,表示的坐标系的旋转。
mahony 滤波原理
互补滤波要求两个信号的干扰噪声处在不同的频率,通过设置两个滤波器的截止频率,确保融合后的信号能够覆盖需求频率。
在 IMU 的姿态估计中,互补滤波器对陀螺仪(低频噪声)使用高通滤波;对加速度/磁力计(高频噪声)使用低频滤波。
(此处尚未对传感器数据实测,噪声和有用频率未知。。。。待后期补足)
互补滤波中,两个滤波器的截止频率一致,此时就需要根据有用频率的值对其进行取舍。
机体水平时,加速度计无法测量绕 Z 轴的旋转量,即偏航角。磁力计也有同样问题,无法测得要磁轴的旋转量。故,需要加速度计和磁力计同时对陀螺仪进行校正。
mahony 滤波主要过程
式中,
表示系统姿态估计的四元数表示;
是经过 PI 调节器产生的新息;
表示实测的惯性向量
和预测的向量
之间的相对旋转(误差)。
—— pure quaternion operator(四元数实部为0),表示只有旋转。
PI 调节器中:[20160901更新]
- 参数 用于控制加速度计和陀螺仪之间的交叉频率;
- 参数 用于校正陀螺仪误差。
预备知识
主要是公式,不包含推导过程。。。。
欧拉角与机体角速度的关系:
旋转矩阵与机体角速度的关系:
四元数与机体角速度的关系:
参考:北航全权老师课件 第五章内容、惯性导航(秦永元)第九章内容。
预测
与卡尔曼滤波相似,mahony 滤波也分为预测-校正。
在预测环节,由三轴陀螺仪测得的角速度,通过式(1)计算出四元数姿态预测。
表示从地球坐标系到机体坐标系,或机体坐标系姿态在地球坐标系下的表示。
校正
在预测环节得到的四元数 ,通过加速度计和磁力计的值进行校正。该环节通常分为两部分:
- 通过加速度计得到 ,然后校正四元数中的横滚(roll)和俯仰(pitch)分量。
- 当磁力计可读时,通过 校正四元数中的偏航(yaw)分量。
加速度计校正
加速度计信号首先经过低通滤波器(消除高频噪声):
然后,对得到的结果进行归一化(normalized)
计算偏差:
式中, 表示重力向量在机体坐标系的向量。
此时,由 与加速度计向量垂直分量叉乘,得到误差值。【两个物理意义相同的向量,理论上叉乘为零】
磁力计校正
数据预处理与加速度计相同,先滤波,然后归一化,得到 。
1. 无 GPS 校准时:
计算误差:
式中, 计算过程如下:
磁力计的输出( )在机体坐标系下,将其转换到导航坐标系:
导航坐标系的 轴与正北对齐,故,可以将磁力计在 平面的投影折算到 轴。
再次变换到机体坐标系:
2. 有 GPS 校准时:
在 px4 中,磁力计使用 GPS 信息 进行校准,故,公式与加速度计相同。
此时,由 与磁力计向量叉乘,得到误差值。【两个物理意义相同的向量,理论上叉乘为零】
更新四元数
由加速度计和磁力计校准得到的误差值:
由该误差值得到修正值:(只有 ki 修正bias)
修正后的角速度值:
根据一阶龙格库塔方法求解一阶微分方程:
可以求出四元数微分方程的差分形式:
四元数规范化:
源码分析
该部分源码直接截取 px4 开源飞控源码(BSD证书)。
px4 为 pixhawk 飞控的固件代码,内部涉及很多滤波及导航的算法。有较大参考价值。
源码,参考日期:20160603;
| 参数 | 默认值 | |
|---|---|---|
| ATT_W_ACC | 0.2f | 加速度计权重 |
| ATT_W_MAG | 0.1f | 磁力计权重 |
| ATT_W_EXT_HDG | 0.1f | 外部航向权重 |
| ATT_W_GYRO_BIAS | 0.1f | 陀螺仪偏差权重 |
| ATT_MAG_DECL | 0.0f | 磁偏角(°) |
| ATT_MAG_DECL_A | 1 | 启用基于GPS的自动磁偏角校正 |
| ATT_EXT_HDG_M | 0 | 外部航向模式 |
| ATT_ACC_COMP | 1 | 启用基于GPS速度的加速度补偿 |
| ATT_BIAS_MAX | 0.05f | 陀螺仪偏差上限 |
| ATT_VIBE_THRESH | 0.2f | 振动水平报警阈值 |
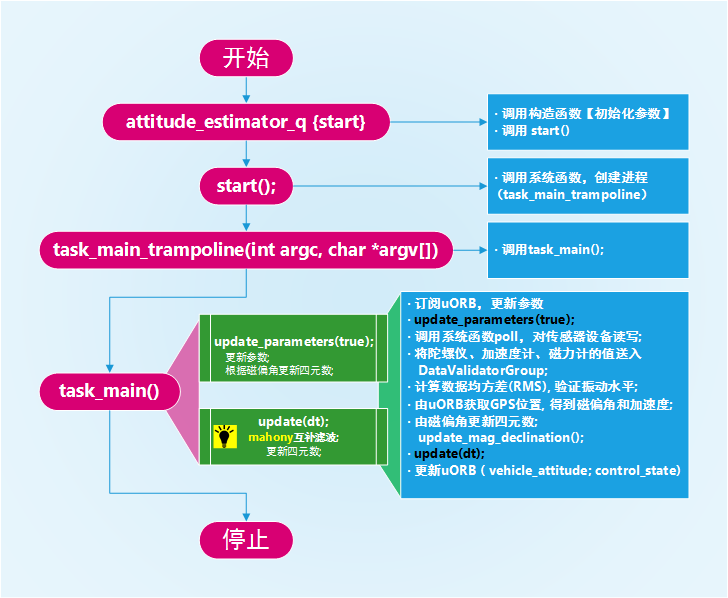
主程序运行流程图:
函数功能简述
AttitudeEstimatorQ::AttitudeEstimatorQ();
构造函数,初始化参数;
AttitudeEstimatorQ::~AttitudeEstimatorQ();
析构函数,杀掉所有任务;
int AttitudeEstimatorQ::start();
启动【attitude_estimator_q】进程,主函数入口: task_main_trampoline
void AttitudeEstimatorQ::print();
打印姿态信息;
void AttitudeEstimatorQ::task_main_trampoline(int argc, char *argv[])
{
attitude_estimator_q::instance->task_main();
}
void AttitudeEstimatorQ::task_main();
主任务进程;
void AttitudeEstimatorQ::update_parameters(bool force);
false: 查看参数是否更新;
true: 获取新参数, 并由磁偏角更新四元数;
bool AttitudeEstimatorQ::init();
由加速度计和磁力计初始化旋转矩阵,有GPS时,校正磁偏角。
bool AttitudeEstimatorQ::update(float dt);
调用init(); 互补滤波
void AttitudeEstimatorQ::update_mag_declination(float new_declination);
使用磁偏角更新四元数
int attitude_estimator_q_main(int argc, char *argv[]);
attitude_estimator_q { start }:实例化instance,运行instance->start();
attitude_estimator_q { stop }:delete instance,指针置空;
attitude_estimator_q { status}:instance->print(),打印姿态信息。
源码分析
- 此处源码逐行分析,可以使用 Ctrl+f 快速定位;
- uORB 相关的数据结构,请参考 px4/Firmware/msg;
/*代码前的注释段(L34~L40)
* @file attitude_estimator_q_main.cpp
*
* Attitude estimator (quaternion based)
*姿态估计(基于四元数)
* @author Anton Babushkin <anton.babushkin@me.com>
*/头文件
(l42~l76)
#include <px4_config.h>
#include <px4_posix.h>//add missing check;
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#include <stdbool.h>
#include <poll.h>
#include <fcntl.h>
#include <float.h>
#include <errno.h>
#include <limits.h>
#include <math.h>
#include <uORB/uORB.h>
#include <uORB/topics/sensor_combined.h>
#include <uORB/topics/vehicle_attitude.h>
#include <uORB/topics/control_state.h>
#include <uORB/topics/vehicle_control_mode.h>
#include <uORB/topics/vehicle_global_position.h>
#include <uORB/topics/vision_position_estimate.h>//视觉位置估计, 未找到文件【待查】;
#include <uORB/topics/att_pos_mocap.h>//mocap-->vicon;
#include <uORB/topics/airspeed.h>
#include <uORB/topics/parameter_update.h>
#include <uORB/topics/estimator_status.h>
#include <drivers/drv_hrt.h>
#include <mathlib/mathlib.h>
#include <mathlib/math/filter/LowPassFilter2p.hpp>
#include <lib/geo/geo.h>
#include <lib/ecl/validation/data_validator_group.h>
#include <systemlib/systemlib.h>
#include <systemlib/param/param.h>
#include <systemlib/perf_counter.h>
#include <systemlib/err.h>
#include <systemlib/mavlink_log.h>using @@@
(l78~l82)
extern "C" __EXPORT int attitude_estimator_q_main(int argc, char *argv[]);
using math::Vector;
using math::Matrix;
using math::Quaternion;此处,extern “C” 表示以 C 格式编译; __EXPORT 表示 将函数名输出到链接器(Linker); using 关键字 表示引入名称到 using 说明出现的声明区域。。
__export
This keyword aids those programming Microsoft Windows. __export causes the function name to be exported to the linker.
namespace attitude_estimator_q
(l84~l89)
class AttitudeEstimatorQ;
namespace attitude_estimator_q
{
AttitudeEstimatorQ *instance;
}//定义命名空间,通过命名空间调用instance;类定义: class AttitudeEstimatorQ
(l92~l210)
class AttitudeEstimatorQ
{//类定义;
public:
AttitudeEstimatorQ();
//构造函数
~AttitudeEstimatorQ();
//析构函数
int start();
//开始任务,成功--返回OK;
static void task_main_trampoline(int argc, char *argv[]);
//跳转到 task_main() ,未使用传入参数;static函数只能被本文件中的函数调用;
void task_main();
void print();
private:
static constexpr float _dt_max = 0.02;//最大时间间隔;
//constexpr(constant expression)常数表达式,c11新关键字;
//优化语法检查和编译速度;
bool _task_should_exit = false;
//如果为 true ,任务退出;
int _control_task = -1;
//进程ID, 默认-1表示没有任务;
int _sensors_sub = -1;//sensor_combined subscribe(订阅);
int _params_sub = -1;//parameter_update subscribe;
int _vision_sub = -1;//视觉位置估计;
int _mocap_sub = -1;//vicon姿态位置估计;
int _airspeed_sub = -1;//airspeed subscribe;
int _global_pos_sub = -1;//vehicle_global_position subscribe;
orb_advert_t _att_pub = nullptr;//vehicle_attitude publish(发布);
orb_advert_t _ctrl_state_pub = nullptr;//发布控制状态主题control_state;
orb_advert_t _est_state_pub = nullptr;//estimator_status
struct {
param_t w_acc;//ATT_W_ACC
param_t w_mag;//ATT_W_MAG
param_t w_ext_hdg;//ATT_W_EXT_HDG 外部航向权重;
param_t w_gyro_bias;//ATT_W_GYRO_BIAS
param_t mag_decl;//ATT_MAG_DECL
param_t mag_decl_auto;//ATT_MAG_DECL_A 磁偏角自动校正;
param_t acc_comp;//ATT_ACC_COMP
param_t bias_max;//ATT_BIAS_MAX 陀螺仪偏差上限;
param_t vibe_thresh;//ATT_VIBE_THRESH 振动报警阈值;
param_t ext_hdg_mode;//ATT_EXT_HDG_M 外部航向模式;
} _params_handles;
//有用参数的句柄;
float _w_accel = 0.0f;
//ATT_W_ACC >>> w_acc >>> _w_accel;
float _w_mag = 0.0f;
float _w_ext_hdg = 0.0f;
float _w_gyro_bias = 0.0f;
float _mag_decl = 0.0f;
bool _mag_decl_auto = false;
bool _acc_comp = false;
float _bias_max = 0.0f;
float _vibration_warning_threshold = 1.0f;//振动警告阈值;
hrt_abstime _vibration_warning_timestamp = 0;
int _ext_hdg_mode = 0;
Vector<3> _gyro;//陀螺仪;
Vector<3> _accel;//加速度计;
Vector<3> _mag;//磁力计;
vision_position_estimate_s _vision = {};//buffer;
Vector<3> _vision_hdg;
att_pos_mocap_s _mocap = {};//buffer;
Vector<3> _mocap_hdg;
airspeed_s _airspeed = {};//buffer;
Quaternion _q;//四元数;
Vector<3> _rates;//姿态角速度;
Vector<3> _gyro_bias;//陀螺仪偏差;
vehicle_global_position_s _gpos = {};//buffer;
Vector<3> _vel_prev;//前一时刻的速度:
Vector<3> _pos_acc;//加速度(body frame??)
DataValidatorGroup _voter_gyro;//数据验证,剔除异常值;
DataValidatorGroup _voter_accel;
DataValidatorGroup _voter_mag;
//姿态速度的二阶低通滤波器;
math::LowPassFilter2p _lp_roll_rate;
math::LowPassFilter2p _lp_pitch_rate;
math::LowPassFilter2p _lp_yaw_rate;
//绝对时间(ms)
hrt_abstime _vel_prev_t = 0;//前一时刻计算速度时的绝对时间;
bool _inited = false;//初始化标识;
bool _data_good = false;//数据可用;
bool _failsafe = false;//故障保护;
bool _vibration_warning = false;//振动警告;
bool _ext_hdg_good = false;//外部航向可用;
orb_advert_t _mavlink_log_pub = nullptr;//mavlink log advert;
//performance measuring tools (counters)
perf_counter_t _update_perf;
perf_counter_t _loop_perf;//未看到使用。。。;
void update_parameters(bool force);//更新参数;
int update_subscriptions();//未使用【待查??】
bool init();
bool update(float dt);
// 偏航角旋转后,立即更新磁偏角;
void update_mag_declination(float new_declination);
};构造函数
(l213~l235)
AttitudeEstimatorQ::AttitudeEstimatorQ() :
_vel_prev(0, 0, 0),
_pos_acc(0, 0, 0),
_voter_gyro(3),//数据成员3个;
_voter_accel(3),
_voter_mag(3),
_lp_roll_rate(250.0f, 30.0f),//低通滤波(采样频率,截止频率);
_lp_pitch_rate(250.0f, 30.0f),
_lp_yaw_rate(250.0f, 20.0f)
{
_voter_mag.set_timeout(200000);//磁力计超时;
//读取Attitude_estimator_q_params.c中的参数;
_params_handles.w_acc = param_find("ATT_W_ACC");
_params_handles.w_mag = param_find("ATT_W_MAG");
_params_handles.w_ext_hdg = param_find("ATT_W_EXT_HDG");//外部航向权重;
_params_handles.w_gyro_bias = param_find("ATT_W_GYRO_BIAS");
_params_handles.mag_decl = param_find("ATT_MAG_DECL");
_params_handles.mag_decl_auto = param_find("ATT_MAG_DECL_A");//磁偏角自动校正;
_params_handles.acc_comp = param_find("ATT_ACC_COMP");
_params_handles.bias_max = param_find("ATT_BIAS_MAX");//陀螺仪偏差上限;
_params_handles.vibe_thresh = param_find("ATT_VIBE_THRESH");//振动警告阈值;
_params_handles.ext_hdg_mode = param_find("ATT_EXT_HDG_M");
}析构函数
l240~l262
AttitudeEstimatorQ::~AttitudeEstimatorQ()
{//杀掉所有任务;
if (_control_task != -1) {
/* task wakes up every 100ms or so at the longest */
_task_should_exit = true;
/* wait for a second for the task to quit at our request */
unsigned i = 0;
do {
/* wait 20ms */
usleep(20000);
/* if we have given up, kill it */
if (++i > 50) {
px4_task_delete(_control_task);
break;
}
} while (_control_task != -1);
}
attitude_estimator_q::instance = nullptr;
}start();
l264~l282
int AttitudeEstimatorQ::start()
{
ASSERT(_control_task == -1);
/* start the task */
//启动任务,返回进程ID;
_control_task = px4_task_spawn_cmd("attitude_estimator_q",/*name*/
SCHED_DEFAULT,/*任务调度程序*/
SCHED_PRIORITY_MAX - 5,/*优先级*/
2500,/*栈大小*/
(px4_main_t)&AttitudeEstimatorQ::task_main_trampoline,/*主函数入口*/
nullptr);
if (_control_task < 0) {
warn("task start failed");
return -errno;
}
return OK;
}print();
l284~l292
void AttitudeEstimatorQ::print()
{//打印当前姿态信息;
warnx("gyro status:");
_voter_gyro.print();
warnx("accel status:");
_voter_accel.print();
warnx("mag status:");
_voter_mag.print();
}task_main_trampoline();
l294~l297
void AttitudeEstimatorQ::task_main_trampoline(int argc, char *argv[])
{
attitude_estimator_q::instance->task_main();
}task_main();
l299~l655
void AttitudeEstimatorQ::task_main()
{
#ifdef __PX4_POSIX
//记录事件执行所花费的时间,performance counters;
perf_counter_t _perf_accel(perf_alloc_once(PC_ELAPSED, "sim_accel_delay"));
perf_counter_t _perf_mpu(perf_alloc_once(PC_ELAPSED, "sim_mpu_delay"));
perf_counter_t _perf_mag(perf_alloc_once(PC_ELAPSED, "sim_mag_delay"));
#endif
//从uORB订阅主题;
_sensors_sub = orb_subscribe(ORB_ID(sensor_combined));
//订阅传感器读数,包含数据参见:Firmware/msg/sensor_combined.msg
_vision_sub = orb_subscribe(ORB_ID(vision_position_estimate));//视觉;
_mocap_sub = orb_subscribe(ORB_ID(att_pos_mocap));//vicon;
_airspeed_sub = orb_subscribe(ORB_ID(airspeed));//空速,见Firmware/msg/airspeed.msg;
_params_sub = orb_subscribe(ORB_ID(parameter_update));//bool saved;
_global_pos_sub = orb_subscribe(ORB_ID(vehicle_global_position));//位置估计值(GPS);
update_parameters(true);//获取新参数;
hrt_abstime last_time = 0;
px4_pollfd_struct_t fds[1] = {};
fds[0].fd = _sensors_sub;//文件描述符;
fds[0].events = POLLIN;//读取事件标识;
//POLLIN: data other than high-priority data may be read without blocking;
while (!_task_should_exit) {
int ret = px4_poll(fds, 1, 1000);
//timeout = 1000; fds_size = 1; 详见Linux的poll函数;
//对字符设备读写;
if (ret < 0) {
// Poll error, sleep and try again
usleep(10000);
PX4_WARN("Q POLL ERROR");
continue;
} else if (ret == 0) {
// Poll timeout, do nothing
PX4_WARN("Q POLL TIMEOUT");
continue;
}
update_parameters(false);//检查orb是否更新;
// Update sensors
sensor_combined_s sensors;
int best_gyro = 0;
int best_accel = 0;
int best_mag = 0;
if (!orb_copy(ORB_ID(sensor_combined), _sensors_sub, &sensors)) {
// Feed validator with recent sensor data
//(put)将最近的传感器数据送入验证组(DataValidatorGroup)
for (unsigned i = 0; i < (sizeof(sensors.gyro_timestamp) / sizeof(sensors.gyro_timestamp[0])); i++) {
//遍历每个陀螺仪数据;
/* ignore empty fields */
//忽略空值;
if (sensors.gyro_timestamp[i] > 0) {
float gyro[3];
for (unsigned j = 0; j < 3; j++) {
if (sensors.gyro_integral_dt[i] > 0) {
//delta time 大于零;
gyro[j] = (double)sensors.gyro_integral_rad[i * 3 + j] / (sensors.gyro_integral_dt[i] / 1e6);
//=角度/时间(1e6用于us->s转换);
} else {
/* fall back to angular rate */
//没有数据更新,回退;
gyro[j] = sensors.gyro_rad_s[i * 3 + j];
}
}
_voter_gyro.put(i, sensors.gyro_timestamp[i], &gyro[0], sensors.gyro_errcount[i], sensors.gyro_priority[i]);
//最后一个参数gyro_priority[]用于支持传感器优先级;
}
/* ignore empty fields */
if (sensors.accelerometer_timestamp[i] > 0) {
_voter_accel.put(i, sensors.accelerometer_timestamp[i], &sensors.accelerometer_m_s2[i * 3],
sensors.accelerometer_errcount[i], sensors.accelerometer_priority[i]);
}
//NED 坐标系下, 单位 m/s^2
/* ignore empty fields */
if (sensors.magnetometer_timestamp[i] > 0) {
_voter_mag.put(i, sensors.magnetometer_timestamp[i], &sensors.magnetometer_ga[i * 3],
sensors.magnetometer_errcount[i], sensors.magnetometer_priority[i]);
}
//NED 坐标系下, 单位 Gauss
}
// Get best measurement values
//获取最佳测量值(DataValidatorGroup)
hrt_abstime curr_time = hrt_absolute_time();
_gyro.set(_voter_gyro.get_best(curr_time, &best_gyro));
_accel.set(_voter_accel.get_best(curr_time, &best_accel));
_mag.set(_voter_mag.get_best(curr_time, &best_mag));
if (_accel.length() < 0.01f) {
warnx("WARNING: degenerate accel!");
continue;
}
//退化,即非满秩,此处为奇异值(0);
if (_mag.length() < 0.01f) {
warnx("WARNING: degenerate mag!");
continue;
}//同上;
_data_good = true;//数据可用;
if (!_failsafe) {
uint32_t flags = DataValidator::ERROR_FLAG_NO_ERROR;
#ifdef __PX4_POSIX
perf_end(_perf_accel);//执行事件结束,计算均值方差等;
perf_end(_perf_mpu);
perf_end(_perf_mag);
#endif
if (_voter_gyro.failover_count() > 0) {
//陀螺仪数据故障计数大于0, 记录错误日志;
_failsafe = true;
flags = _voter_gyro.failover_state();
mavlink_and_console_log_emergency(&_mavlink_log_pub, "Gyro #%i failure :%s%s%s%s%s!",
_voter_gyro.failover_index(),
((flags & DataValidator::ERROR_FLAG_NO_DATA) ? " No data" : ""),
((flags & DataValidator::ERROR_FLAG_STALE_DATA) ? " Stale data" : ""),
((flags & DataValidator::ERROR_FLAG_TIMEOUT) ? " Data timeout" : ""),
((flags & DataValidator::ERROR_FLAG_HIGH_ERRCOUNT) ? " High error count" : ""),
((flags & DataValidator::ERROR_FLAG_HIGH_ERRDENSITY) ? " High error density" : ""));
}
if (_voter_accel.failover_count() > 0) {
//同上,故障日志;
_failsafe = true;
flags = _voter_accel.failover_state();
mavlink_and_console_log_emergency(&_mavlink_log_pub, "Accel #%i failure :%s%s%s%s%s!",
_voter_accel.failover_index(),
((flags & DataValidator::ERROR_FLAG_NO_DATA) ? " No data" : ""),
((flags & DataValidator::ERROR_FLAG_STALE_DATA) ? " Stale data" : ""),
((flags & DataValidator::ERROR_FLAG_TIMEOUT) ? " Data timeout" : ""),
((flags & DataValidator::ERROR_FLAG_HIGH_ERRCOUNT) ? " High error count" : ""),
((flags & DataValidator::ERROR_FLAG_HIGH_ERRDENSITY) ? " High error density" : ""));
}
if (_voter_mag.failover_count() > 0) {
//同上,故障日志;
_failsafe = true;
flags = _voter_mag.failover_state();
mavlink_and_console_log_emergency(&_mavlink_log_pub, "Mag #%i failure :%s%s%s%s%s!",
_voter_mag.failover_index(),
((flags & DataValidator::ERROR_FLAG_NO_DATA) ? " No data" : ""),
((flags & DataValidator::ERROR_FLAG_STALE_DATA) ? " Stale data" : ""),
((flags & DataValidator::ERROR_FLAG_TIMEOUT) ? " Data timeout" : ""),
((flags & DataValidator::ERROR_FLAG_HIGH_ERRCOUNT) ? " High error count" : ""),
((flags & DataValidator::ERROR_FLAG_HIGH_ERRDENSITY) ? " High error density" : ""));
}
if (_failsafe) {
//故障安全机制;
mavlink_and_console_log_emergency(&_mavlink_log_pub, "SENSOR FAILSAFE! RETURN TO LAND IMMEDIATELY");
}
}
//若启用振动报警,且振动级别超过设定阈值,触发报警;
//振动级别由数据的方均根(RMS)给出;
if (!_vibration_warning && (_voter_gyro.get_vibration_factor(curr_time) > _vibration_warning_threshold ||
_voter_accel.get_vibration_factor(curr_time) > _vibration_warning_threshold ||
_voter_mag.get_vibration_factor(curr_time) > _vibration_warning_threshold)) {
if (_vibration_warning_timestamp == 0) {
_vibration_warning_timestamp = curr_time;
} else if (hrt_elapsed_time(&_vibration_warning_timestamp) > 10000000) {
_vibration_warning = true;
mavlink_and_console_log_critical(&_mavlink_log_pub, "HIGH VIBRATION! g: %d a: %d m: %d",
(int)(100 * _voter_gyro.get_vibration_factor(curr_time)),
(int)(100 * _voter_accel.get_vibration_factor(curr_time)),
(int)(100 * _voter_mag.get_vibration_factor(curr_time)));
}
} else {
_vibration_warning_timestamp = 0;
}
}
// Update vision and motion capture heading
//更新视觉和vicon航向
bool vision_updated = false;
orb_check(_vision_sub, &vision_updated);
bool mocap_updated = false;
orb_check(_mocap_sub, &mocap_updated);
if (vision_updated) {
orb_copy(ORB_ID(vision_position_estimate), _vision_sub, &_vision);//将订阅主题的内容复制到buffer(_vision)中;
math::Quaternion q(_vision.q);
math::Matrix<3, 3> Rvis = q.to_dcm();
math::Vector<3> v(1.0f, 0.0f, 0.4f);
//没看出 v 向量具体含义,疑似磁偏校正;
// Rvis is Rwr (robot respect to world) while v is respect to world.
// Hence Rvis must be transposed having (Rwr)' * Vw
// Rrw * Vw = vn. This way we have consistency
_vision_hdg = Rvis.transposed() * v;
}
//通过视觉得到的姿态估计q->Rvis,将v转换到机体坐标系;
if (mocap_updated) {
orb_copy(ORB_ID(att_pos_mocap), _mocap_sub, &_mocap);
math::Quaternion q(_mocap.q);
math::Matrix<3, 3> Rmoc = q.to_dcm();
math::Vector<3> v(1.0f, 0.0f, 0.4f);
// Rmoc is Rwr (robot respect to world) while v is respect to world.
// Hence Rmoc must be transposed having (Rwr)' * Vw
// Rrw * Vw = vn. This way we have consistency
_mocap_hdg = Rmoc.transposed() * v;
}
// Update airspeed
bool airspeed_updated = false;
orb_check(_airspeed_sub, &airspeed_updated);
if (airspeed_updated) {
orb_copy(ORB_ID(airspeed), _airspeed_sub, &_airspeed);
}
// Check for timeouts on data
if (_ext_hdg_mode == 1) {
_ext_hdg_good = _vision.timestamp_boot > 0 && (hrt_elapsed_time(&_vision.timestamp_boot) < 500000);
} else if (_ext_hdg_mode == 2) {
_ext_hdg_good = _mocap.timestamp_boot > 0 && (hrt_elapsed_time(&_mocap.timestamp_boot) < 500000);
}
bool gpos_updated;
orb_check(_global_pos_sub, &gpos_updated);
if (gpos_updated) {
orb_copy(ORB_ID(vehicle_global_position), _global_pos_sub, &_gpos);
if (_mag_decl_auto && _gpos.eph < 20.0f && hrt_elapsed_time(&_gpos.timestamp) < 1000000) {
/* set magnetic declination automatically */
update_mag_declination(math::radians(get_mag_declination(_gpos.lat, _gpos.lon)));
}
//磁偏自动校正,且水平偏差的标准差小于20,根据位置估计值(GPS)(vehicle_global_position)校正磁偏角;
//get_mag_declination()函数查表得到地磁偏角,进行补偿。
}
if (_acc_comp && _gpos.timestamp != 0 && hrt_absolute_time() < _gpos.timestamp + 20000 && _gpos.eph < 5.0f && _inited) {
/* position data is actual */
//基于GPS的位置信息,微分得到加速度值;
if (gpos_updated) {
Vector<3> vel(_gpos.vel_n, _gpos.vel_e, _gpos.vel_d);
/* velocity updated */
if (_vel_prev_t != 0 && _gpos.timestamp != _vel_prev_t) {
float vel_dt = (_gpos.timestamp - _vel_prev_t) / 1000000.0f;//时间间隔,单位(s)
/* calculate acceleration in body frame */
_pos_acc = _q.conjugate_inversed((vel - _vel_prev) / vel_dt);
}//由ned坐标系下的速度求出机体坐标系下的加速度;
_vel_prev_t = _gpos.timestamp;
_vel_prev = vel;
}
} else {
/* position data is outdated, reset acceleration */
//位置信息已过时,重置;
_pos_acc.zero();
_vel_prev.zero();
_vel_prev_t = 0;
}
/* time from previous iteration */
hrt_abstime now = hrt_absolute_time();
float dt = (last_time > 0) ? ((now - last_time) / 1000000.0f) : 0.00001f;//用极小值0.00001表示零,预防除零错误;
last_time = now;
if (dt > _dt_max) {
dt = _dt_max;
}//时间间隔上限;
if (!update(dt)) {
continue;
}//调用update(dt),**互补滤波**,更新四元数;
//############若不熟悉update(),请转到函数查看;
Vector<3> euler = _q.to_euler();
struct vehicle_attitude_s att = {};
att.timestamp = sensors.timestamp;
att.roll = euler(0);
att.pitch = euler(1);
att.yaw = euler(2);
att.rollspeed = _rates(0);
att.pitchspeed = _rates(1);
att.yawspeed = _rates(2);
for (int i = 0; i < 3; i++) {
att.g_comp[i] = _accel(i) - _pos_acc(i);
}//补偿重力向量;
/* copy offsets */
memcpy(&att.rate_offsets, _gyro_bias.data, sizeof(att.rate_offsets));
//memcpy(*dest,*src,size);
Matrix<3, 3> R = _q.to_dcm();
/* copy rotation matrix */
memcpy(&att.R[0], R.data, sizeof(att.R));
att.R_valid = true;
memcpy(&att.q[0], _q.data, sizeof(att.q));
att.q_valid = true;
//获取姿态振动, RMS;
att.rate_vibration = _voter_gyro.get_vibration_factor(hrt_absolute_time());
att.accel_vibration = _voter_accel.get_vibration_factor(hrt_absolute_time());
att.mag_vibration = _voter_mag.get_vibration_factor(hrt_absolute_time());
/* the instance count is not used here */
int att_inst;
orb_publish_auto(ORB_ID(vehicle_attitude), &_att_pub, &att, &att_inst, ORB_PRIO_HIGH);
//广播姿态信息;
{//使用当前姿态,更新control_state,并发布;
struct control_state_s ctrl_state = {};
ctrl_state.timestamp = sensors.timestamp;
/* attitude quaternions for control state */
ctrl_state.q[0] = _q(0);
ctrl_state.q[1] = _q(1);
ctrl_state.q[2] = _q(2);
ctrl_state.q[3] = _q(3);
/* attitude rates for control state */
//低通滤波,输入参数为当前值;
ctrl_state.roll_rate = _lp_roll_rate.apply(_rates(0));
ctrl_state.pitch_rate = _lp_pitch_rate.apply(_rates(1));
ctrl_state.yaw_rate = _lp_yaw_rate.apply(_rates(2));
/* Airspeed - take airspeed measurement directly here as no wind is estimated */
if (PX4_ISFINITE(_airspeed.indicated_airspeed_m_s) && hrt_absolute_time() - _airspeed.timestamp < 1e6
&& _airspeed.timestamp > 0) {
ctrl_state.airspeed = _airspeed.indicated_airspeed_m_s;
ctrl_state.airspeed_valid = true;
} else {
ctrl_state.airspeed_valid = false;
}
/* the instance count is not used here */
int ctrl_inst;
/* publish to control state topic */
//发布控制状态主题,control_state.msg。
orb_publish_auto(ORB_ID(control_state), &_ctrl_state_pub, &ctrl_state, &ctrl_inst, ORB_PRIO_HIGH);
}
{
struct estimator_status_s est = {};
est.timestamp = sensors.timestamp;
est.vibe[0] = _voter_accel.get_vibration_offset(est.timestamp, 0);
est.vibe[1] = _voter_accel.get_vibration_offset(est.timestamp, 1);
est.vibe[2] = _voter_accel.get_vibration_offset(est.timestamp, 2);
/* the instance count is not used here */
int est_inst;
/* publish to control state topic */
orb_publish_auto(ORB_ID(estimator_status), &_est_state_pub, &est, &est_inst, ORB_PRIO_HIGH);
}
}
}update_parameters();
l657~l686
void AttitudeEstimatorQ::update_parameters(bool force)
{
bool updated = force;
if (!updated) {
orb_check(_params_sub, &updated);//查看参数是否更新;
}
if (updated) {//获取新参数;
parameter_update_s param_update;
orb_copy(ORB_ID(parameter_update), _params_sub, ¶m_update);
param_get(_params_handles.w_acc, &_w_accel);
param_get(_params_handles.w_mag, &_w_mag);
param_get(_params_handles.w_ext_hdg, &_w_ext_hdg);
param_get(_params_handles.w_gyro_bias, &_w_gyro_bias);
float mag_decl_deg = 0.0f;
param_get(_params_handles.mag_decl, &mag_decl_deg);
update_mag_declination(math::radians(mag_decl_deg));
int32_t mag_decl_auto_int;
param_get(_params_handles.mag_decl_auto, &mag_decl_auto_int);
_mag_decl_auto = mag_decl_auto_int != 0;//自动磁偏角校正;
int32_t acc_comp_int;
param_get(_params_handles.acc_comp, &acc_comp_int);
_acc_comp = acc_comp_int != 0;
param_get(_params_handles.bias_max, &_bias_max);//陀螺仪偏差上限;
param_get(_params_handles.vibe_thresh, &_vibration_warning_threshold);//振动警告阈值;
param_get(_params_handles.ext_hdg_mode, &_ext_hdg_mode);
}
}init();
为导航坐标系(NED)的 轴(D)在机体坐标系中的表示;
导航系中,D正方向朝下;
为导航坐标系(NED)的 轴(N)在机体坐标系;
i = (_mag - k * (_mag * k)); //施密特正交化;
//因 向量 k 已归一化,故分母等于1;
为导航坐标系(NED)的 轴(E)在机体坐标系;
j = k % i //叉乘求正交向量;
构造旋转矩阵
R.set_row(0, i); R.set_row(1, j); R.set_row(2, k);
转换为四元数 ,根据设定校正磁偏,归一化;
l688~l728
bool AttitudeEstimatorQ::init()
{
// Rotation matrix can be easily constructed from acceleration and mag field vectors
// 'k' is Earth Z axis (Down) unit vector in body frame
Vector<3> k = -_accel;
k.normalize();
// 'i' is Earth X axis (North) unit vector in body frame, orthogonal with 'k'
Vector<3> i = (_mag - k * (_mag * k));
i.normalize();
// 'j' is Earth Y axis (East) unit vector in body frame, orthogonal with 'k' and 'i'
Vector<3> j = k % i;
// Fill rotation matrix
Matrix<3, 3> R;
R.set_row(0, i);
R.set_row(1, j);
R.set_row(2, k);
// Convert to quaternion
_q.from_dcm(R);
// Compensate for magnetic declination
Quaternion decl_rotation;
decl_rotation.from_yaw(_mag_decl);
_q = decl_rotation * _q;
_q.normalize();
if (PX4_ISFINITE(_q(0)) && PX4_ISFINITE(_q(1)) &&
PX4_ISFINITE(_q(2)) && PX4_ISFINITE(_q(3)) &&
_q.length() > 0.95f && _q.length() < 1.05f) {
_inited = true;
} else {
_inited = false;
}
return _inited;
}update();
init();//执行一次;
由加速度计和磁力计初始化旋转矩阵和四元数;
mag_earth = _q.conjugate(_mag);
不使用外部航向,或外部航向异常时,采用磁力计校准;
将磁力计读数从机体坐标系转换到导航坐标系;
mag_err = _wrap_pi(atan2f(mag_earth(1), mag_earth(0)) - _mag_decl);
将磁力计的读数由向量换算到角度; 该角度减去磁偏,得到磁场偏差;
_mag_decl 由GPS得到;
**atan2f: 2 表示两个输入参数; 支持四象限内角度换算; 输出弧度值;
**_wrap_pi: 将(0~2pi)的角度映射到(-pi~pi);corr += _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, -mag_err)) * _w_mag;
将磁场偏差转换到机体坐标系,并乘以其对应权重;
_q.normalize();
四元数归一化;
这里的归一化用于校正update_mag_declination后的偏差。corr += (k % (_accel - _pos_acc).normalized()) * _w_accel;
向量 k 是重力加速度向量(0,0,1)转换到机体坐标系;
_accel 是加速度计的读数;
_pos_acc 是由位置估计(GPS) 微分得到的加速度;
_accel - _pos_acc 表示飞行器加速度向量减去其水平分量;
k 与 (_accel - _pos_acc)叉乘,得到偏差;
_gyro_bias += corr * (_w_gyro_bias * dt);
得到陀螺仪修正值
此处修正值为 mahony 滤波的 pi 控制器的 积分部分;
因为 _gyro_bias 不归零,故不断累积;
_rates = _gyro + _gyro_bias;
_rates 表示角速度;
corr += _rates;
这里的 corr = (Ea+Em) + (Ea+Em)*dt + gyro;
个人认为这里的 corr 才是更新后的角速度;_q += _q.derivative(corr) * dt;
更新四元数,derivative为求导函数,使用一阶龙格库塔求导。
l730~l817
bool AttitudeEstimatorQ::update(float dt)
{
if (!_inited) {
if (!_data_good) {
return false;
}
return init();
}
Quaternion q_last = _q;//保存上一状态,以便恢复;
// Angular rate of correction
Vector<3> corr;//初始化元素为0;
//_ext_hdg_good表示外部航向数据可用;
if (_ext_hdg_mode > 0 && _ext_hdg_good) {
if (_ext_hdg_mode == 1) {
// Vision heading correction
//视觉航向校正;
// Project heading to global frame and extract XY component
//将航向投影到导航坐标系,提取XY分量;
Vector<3> vision_hdg_earth = _q.conjugate(_vision_hdg);
float vision_hdg_err = _wrap_pi(atan2f(vision_hdg_earth(1), vision_hdg_earth(0)));
// Project correction to body frame
corr += _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, -vision_hdg_err)) * _w_ext_hdg;
}
if (_ext_hdg_mode == 2) {
// Mocap heading correction
// Project heading to global frame and extract XY component
Vector<3> mocap_hdg_earth = _q.conjugate(_mocap_hdg);
float mocap_hdg_err = _wrap_pi(atan2f(mocap_hdg_earth(1), mocap_hdg_earth(0)));
// Project correction to body frame
corr += _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, -mocap_hdg_err)) * _w_ext_hdg;
}
}
if (_ext_hdg_mode == 0 || !_ext_hdg_good) {
// Magnetometer correction
// Project mag field vector to global frame and extract XY component
Vector<3> mag_earth = _q.conjugate(_mag);
float mag_err = _wrap_pi(atan2f(mag_earth(1), mag_earth(0)) - _mag_decl);
// Project magnetometer correction to body frame
corr += _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, -mag_err)) * _w_mag;
}
_q.normalize();
// Accelerometer correction
// Project 'k' unit vector of earth frame to body frame
// Vector<3> k = _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, 1.0f));
// Optimized version with dropped zeros
Vector<3> k(
2.0f * (_q(1) * _q(3) - _q(0) * _q(2)),
2.0f * (_q(2) * _q(3) + _q(0) * _q(1)),
(_q(0) * _q(0) - _q(1) * _q(1) - _q(2) * _q(2) + _q(3) * _q(3))
);
corr += (k % (_accel - _pos_acc).normalized()) * _w_accel;
// Gyro bias estimation
_gyro_bias += corr * (_w_gyro_bias * dt);
for (int i = 0; i < 3; i++) {//陀螺仪最大偏差上限;
_gyro_bias(i) = math::constrain(_gyro_bias(i), -_bias_max, _bias_max);
}
_rates = _gyro + _gyro_bias;
// Feed forward gyro
corr += _rates;
// Apply correction to state
_q += _q.derivative(corr) * dt;
// Normalize quaternion
_q.normalize();
//判断四元数是否发散,若发散,则沿用之前的四元数;
if (!(PX4_ISFINITE(_q(0)) && PX4_ISFINITE(_q(1)) &&
PX4_ISFINITE(_q(2)) && PX4_ISFINITE(_q(3)))) {
// Reset quaternion to last good state
_q = q_last;
_rates.zero();
_gyro_bias.zero();
return false;
}
return true;
}update_mag_declination();
l819~l832
void AttitudeEstimatorQ::update_mag_declination(float new_declination)
{
// Apply initial declination or trivial rotations without changing estimation
//忽略微小旋转;
if (!_inited || fabsf(new_declination - _mag_decl) < 0.0001f) {
_mag_decl = new_declination;
} else {
// Immediately rotate current estimation to avoid gyro bias growth
//磁偏超过一定值后,校正姿态;
Quaternion decl_rotation;
decl_rotation.from_yaw(new_declination - _mag_decl);
//由磁偏角度转化为四元数;
_q = decl_rotation * _q;
//四元数相乘表示角度相加;
_mag_decl = new_declination;
}
}attitude_estimator_q_main();
l834~l890
int attitude_estimator_q_main(int argc, char *argv[])
{//外部调用接口;
if (argc < 2) {
warnx("usage: attitude_estimator_q {start|stop|status}");
return 1;
}
if (!strcmp(argv[1], "start")) {
if (attitude_estimator_q::instance != nullptr) {
warnx("already running");
return 1;
}
//实例化,instance;
attitude_estimator_q::instance = new AttitudeEstimatorQ;
if (attitude_estimator_q::instance == nullptr) {
warnx("alloc failed");
return 1;
}
if (OK != attitude_estimator_q::instance->start()) {
delete attitude_estimator_q::instance;
attitude_estimator_q::instance = nullptr;
warnx("start failed");
return 1;
}
return 0;
}
if (!strcmp(argv[1], "stop")) {
if (attitude_estimator_q::instance == nullptr) {
warnx("not running");
return 1;
}
//删除实例化对象,指针置空;
delete attitude_estimator_q::instance;
attitude_estimator_q::instance = nullptr;
return 0;
}
//打印当前姿态信息;
if (!strcmp(argv[1], "status")) {
if (attitude_estimator_q::instance) {
attitude_estimator_q::instance->print();
warnx("running");
return 0;
} else {
warnx("not running");
return 1;
}
}
warnx("unrecognized command");
return 1;
}