这个其实是为了直观的观察PID的调节过程,因为本人对于数学并不擅长,又说PID是比较依赖经验,看着老外搭建了一个实验的设备,我也画了葫芦做了一个。以下是需要的设备介绍。

需要的设备
硬件介绍
- 树莓派3b
- MPU6050
- PCA9685
- 2个有浆无刷电机(浆要两个不一样的,转的时候要抵消)
编程平台
树莓派运行官方Linux系统,编辑器用交叉编译工具(arm-linux-g++)。
MPU6050之初始化
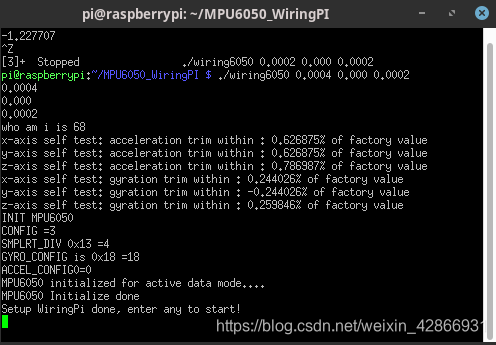
这里就不介绍6050的各种功能了。树莓派与MPU6050通过IIC接口连接,供电也是用树莓派的3.3v接口。其实早在2个月前已经完成了功能,但是由于MPU6050的接线问题,导致初始化通不过,而且写入的数据和读出的数据对不上,一度以为是IIC库,或者是模块坏了,有时候灵光,有时候不灵光。MPU6050接线已经要稳可靠。期间还烧了一块MPU9250。
void MPU6050lib::initMPU6050()
{
uint8_t c = 0;
delay(1000);
for(;;)
{
printf("INIT MPU6050\n");
WriteByte(MPU6050_ADDRESS, PWR_MGMT_1, 0x80); //复位
delay(100);
c = ReadByte(MPU6050_ADDRESS, PWR_MGMT_1);
if(c != 0x40)
continue;
delay(100);
WriteByte(MPU6050_ADDRESS, PWR_MGMT_1, 0x00);//唤醒
delay(100);
WriteByte(MPU6050_ADDRESS, PWR_MGMT_1, 0x01);//设置时钟
delay(100);
c = ReadByte(MPU6050_ADDRESS, PWR_MGMT_1);
if(c != 0x01)
continue;
delay(100);
//DLPF_CFG,设置低通滤波,我一度以为是这里出问题。后来想到是不是杜邦线接线不稳。
WriteByte(MPU6050_ADDRESS, CONFIG, DLPF_CFG);
#if defined MPU_DEBUG
c = ReadByte(MPU6050_ADDRESS, CONFIG);
printf("CONFIG =%x\n", c);
#endif
if(c != DLPF_CFG)
continue;
// Set sample rate = gyroscope output rate 1000/(1 + SMPLRT_DIV)
// 0x04 use 200hz ,0x07 use 125hz
//SMPLRT_DIV 0x19
delay(100);
WriteByte(MPU6050_ADDRESS, SMPLRT_DIV, SMPLRT_DIV_RATE);
delay(100);
#if defined MPU_DEBUG
c = ReadByte(MPU6050_ADDRESS, SMPLRT_DIV);
printf("SMPLRT_DIV0x13 =%x\n", c);
#endif
if(c != SMPLRT_DIV_RATE)
continue;
delay(100);
uint8_t c = ReadByte(MPU6050_ADDRESS, GYRO_CONFIG);
WriteByte(MPU6050_ADDRESS, GYRO_CONFIG, 0x00); //
WriteByte(MPU6050_ADDRESS, GYRO_CONFIG, c & ~0x18); //
delay(100);
//SetGscale = 0x03,这里设置2000的量程。
WriteByte(MPU6050_ADDRESS, GYRO_CONFIG, SetGscale << 3); //
#if defined MPU_DEBUG
c = ReadByte(MPU6050_ADDRESS, GYRO_CONFIG);
printf("GYRO_CONFIG is 0x18 =%x\n", c);
#endif
if(c != (3<<3))
continue;
delay(100);
c = ReadByte(MPU6050_ADDRESS, ACCEL_CONFIG);
WriteByte(MPU6050_ADDRESS, ACCEL_CONFIG, 0x00);
delay(100);
WriteByte(MPU6050_ADDRESS, ACCEL_CONFIG, c & ~0x18);
WriteByte(MPU6050_ADDRESS, ACCEL_CONFIG, SetAscale << 3);
delay(100);
#if defined MPU_DEBUG
c = ReadByte(MPU6050_ADDRESS, ACCEL_CONFIG);
printf("ACCEL_CONFIG0=%x\n", c);
#endif
delay(100);
WriteByte(MPU6050_ADDRESS, INT_PIN_CFG, 0x22);
delay(100);
WriteByte(MPU6050_ADDRESS, INT_ENABLE, 0x00); //关闭所有中断
delay(100);
WriteByte(MPU6050_ADDRESS, USER_CTRL,0X00);//I2C主模式关闭
delay(100);
WriteByte(MPU6050_ADDRESS, FIFO_EN,0X00);//关闭FIFO
delay(100);
WriteByte(MPU6050_ADDRESS, PWR_MGMT_2, 0x00);
delay(100);
if(c == 0x00)
break;
}
}
这么复杂的初始化,主要是经常发现6050初始化常常失败,一开始以为是接线不牢固什么的,直到前两天才怀疑是I2C库文件的问题,后来改了WiringPi库。神奇的有效果了,再也没有出现问题,6050的原始数据也非常稳定。
MPU6050读写函数实现
//wiringPiI2CWriteReg8,改成WiringPi后的代码实现,参数address可以省略,这里没改。
uint8_t MPU6050lib::WriteByte(uint8_t address, uint8_t subAddress, uint8_t data)
{
if(wiringPiI2CWriteReg8(fd,subAddress,data) < 0)
return -1;
return 0;
}
uint8_t MPU6050lib::ReadByte(uint8_t address, uint8_t subAddress)
{
uint8_t data;
data = wiringPiI2CReadReg8(fd, subAddress);
return data;
}
uint8_t MPU6050lib::ReadBytes(uint8_t address, uint8_t subAddress, uint8_t count, uint8_t *dest)
{
for(uint8_t i = 0; i < count; i++)
{
dest[i] = ReadByte(address, subAddress + i);
}
return 0;
}
如果要移植到各自平台,改上面3个函数,基本差不多可以用了。
void MPU6050lib::readAccelData(int16_t *destination)
{
uint8_t rawData[6]; // X,Y,Z,数据都放在这里
ReadBytes(MPU6050_ADDRESS, ACCEL_XOUT_H, 6, &rawData[0]);
destination[0] = (int16_t)((rawData[0] << 8) | rawData[1]) ;
destination[1] = (int16_t)((rawData[2] << 8) | rawData[3]) ;
destination[2] = (int16_t)((rawData[4] << 8) | rawData[5]) ;
}
void MPU6050lib::readGyroData(int16_t *destination)
{
uint8_t rawData[6]; // X,Y,Z,数据都放在这里
ReadBytes(MPU6050_ADDRESS, GYRO_XOUT_H, 6, &rawData[0]);
destination[0] = (int16_t)((rawData[0] << 8) | rawData[1]) ;
destination[1] = (int16_t)((rawData[2] << 8) | rawData[3]) ;
destination[2] = (int16_t)((rawData[4] << 8) | rawData[5]) ;
}
做姿态解算前的准备
接下来在sensor.c的ms_update()调用函数进入循环即可。
int ms_update() {
mpu.readAccelData(accelCount);
accelCount[0] -= ACCEL_OFFSET_X; //先平放输出300次,求平均值
accelCount[1] -= ACCEL_OFFSET_Y;
accelCount[2] += ACCEL_OFFSET_Z;//平放数据理想情况是16384,这里加上3776 = 16384
ax = (float)(accelCount[0] )*aRes; //aRes = 1/16384 ,这里转换数据。
ay = (float)(accelCount[1] )*aRes;
az = (float)(accelCount[2] )*aRes;
//delay_ms(5);
mpu.readGyroData(gyroCount);
gyroCount[0] -= GYRO_OFFSET_X;
gyroCount[1] -= GYRO_OFFSET_Y;
gyroCount[2] -= GYRO_OFFSET_Z;
gx = (float)(gyroCount[0] )*gRes ; //同上面的情况。
gy = (float)(gyroCount[1] )*gRes ;
gz = (float)(gyroCount[2] )*gRes ;
Mahony_update_6X(gx, gy, gz, ax, ay, az); //滤波
Mahony_computeAngles();
//printf("%f, %f\n", getRoll(), getPitch());
delay_ms(15); //
return 0;
}
打印ROLL角的数据
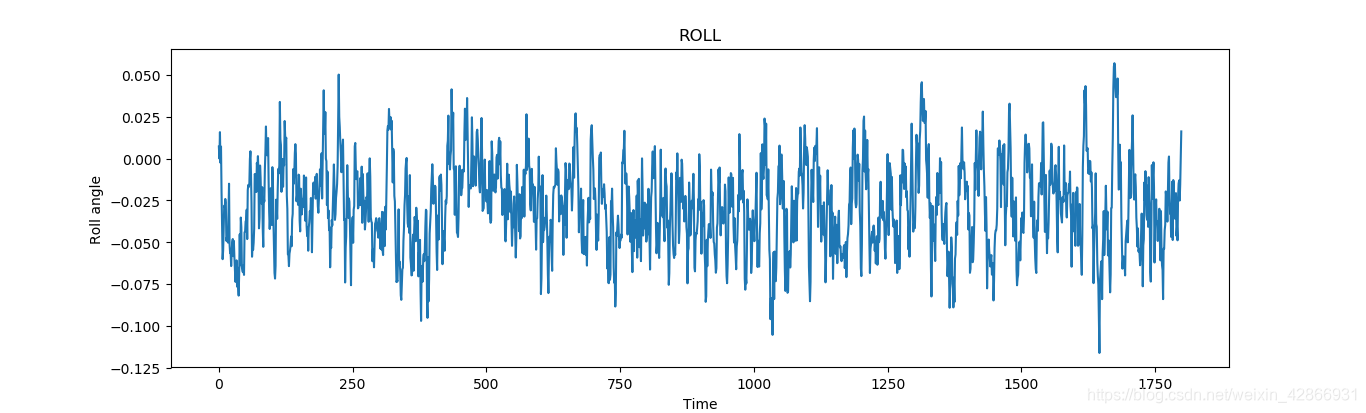 看着不平滑吧,但是输出的角度大概旧在-0.1- 0.05之间,自我感觉挺平稳的了。下一步是调戏解算代码的参数,或者是使用不同的解算方法,比如是卡尔漫,一阶,二阶滤波。
看着不平滑吧,但是输出的角度大概旧在-0.1- 0.05之间,自我感觉挺平稳的了。下一步是调戏解算代码的参数,或者是使用不同的解算方法,比如是卡尔漫,一阶,二阶滤波。