一、数学建模
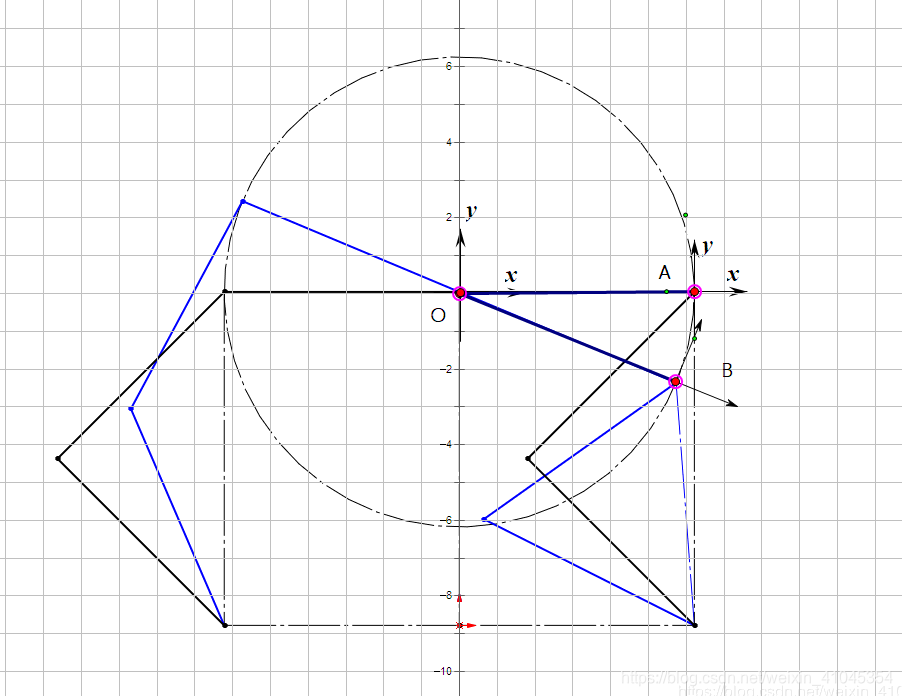
假设俯仰角为
λ,对于坐标系A足端位置
PA[x,y],我们求出其在B坐标系下的位置
PB=[x′,y′],然后通过逆运动学求解关节角度
θ1,θ2即可。
假定机器人身长为L,腿长分别为L1, L2
1、坐标变换
前腿
a、坐标系A-O变换矩阵:
T1=⎣⎡100010L01⎦⎤
b、坐标系O-B变换矩阵:
T2=⎣⎡cosλsinλ0−sinλcosλ0−L01⎦⎤
根据变换矩阵,我们可以求出
PB坐标:
PB=T2T1PA
即:
⎣⎡x′y′1⎦⎤=⎣⎡cosλsinλ0−sinλcosλ0−L01⎦⎤⎣⎡100010L01⎦⎤⎣⎡xy1⎦⎤
化简之后:
⎣⎡x′y′1⎦⎤=⎣⎡cosλsinλ0−sinλcosλ0Lcosλ−LLsinλ1⎦⎤⎣⎡xy1⎦⎤
后腿
对于后腿实际上只是L取反即可:
⎣⎡x′y′1⎦⎤=⎣⎡cosλsinλ0−sinλcosλ0−Lcosλ+L−Lsinλ1⎦⎤⎣⎡xy1⎦⎤
2、逆运动学求解
cosβ=2l1l2−l12−l22+x2+y2
sinβ=1−cos2β
β=atan2(sinβ,cosβ)
α=atan2(x,y)−atan2(k2,k1)=atan2(x,y)−atan2(l2s2,−l1−l2c2)
最终我们就能得到两个关节角度
如果觉得ok,点个赞,点个关注,也欢迎给个打赏支持一下编者的工作