在本教程的这一部分中,将讨论使用哪些技术,可以遍历图的所有顶点。
遍历图表表示访问图的所有节点和顶点。 使用两种标准方法,可以遍历图。接下来将详细讨论它们中。
- 广度优先搜索
- 深度优先搜索
1. 广度优先搜索(BFS)算法
广度优先搜索是一种图遍历算法,它从根节点开始遍历图并探索所有相邻节点。 然后,它选择最近的节点并浏览所有未探测的节点。 对于每个最近的节点,该算法遵循相同的过程,直到找到目标为止。
下面给出了广度优先搜索的算法。算法从检查节点A及其所有邻居开始。在下一步中,搜索A的最近节点的邻居,并且在后续步骤中继续处理。 该算法探索所有节点的所有邻居,并确保每个节点只访问一次,并且没有访问任何节点两次。
算法
第1步:设置状态 = 1(就绪状态)
对于G中的每个节点
第2步:将起始节点A排队
并设置其状态 = 2
(等待状态)
第3步:重复第4步和第5步,直到
队列是空的
第4步:使节点N出列。处理它
并设置其状态 = 3
(处理状态)。
第5步:将所有邻居排队
N处于就绪状态
(其STATUS = 1)并设置它们状态 = 2
(等待状态)
[循环结束]
第6步:退出
示例
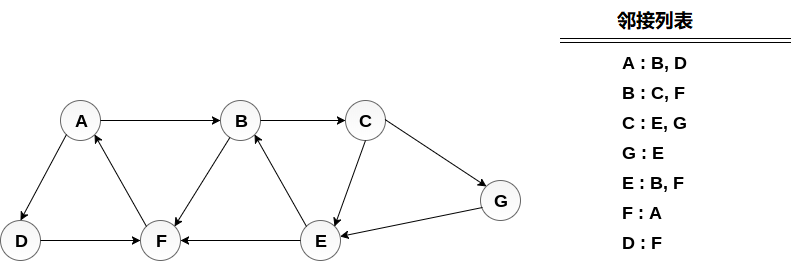
考虑下图中显示的图G,计算从节点A到节点E的最小路径p。给定每条边的长度为1。
解答:
最小路径P可以通过应用广度优先搜索算法找到,该算法将从节点A开始并将以E结束。算法使用两个队列,即QUEUE1和QUEUE2。 QUEUE1保存要处理的所有节点,而QUEUE2保存从QUEUE1处理和删除的所有节点。
下面来看看节点A 中的图。
- 将
A添加到QUEUE1,将NULL添加到QUEUE2。QUEUE1 = {A} QUEUE2 = {NULL} -
从
QUEUE1中删除节点A并插入其所有邻居,将节点A插入QUEUE2。QUEUE1 = {B, D} QUEUE2 = {A} -
从
QUEUE1中删除节点B并插入其所有邻居。 将节点B插入QUEUE2。QUEUE1 = {D, C, F} QUEUE2 = {A, B} -
从
QUEUE1中删除节点D并插入其所有邻居。 由于F是已插入的唯一邻居,因此不会再插入它。 将节点D插入QUEUE2。
QUEUE1 = {C, F}
QUEUE2 = { A, B, D}
-
从
QUEUE1中删除节点C并插入其所有邻居。 将节点C添加到QUEUE2。QUEUE1 = {F, E, G} QUEUE2 = {A, B, D, C} -
从
QUEUE1中删除F并添加其所有邻居。由于已经添加了所有邻居,不会再添加它们。 将节点F添加到QUEUE2。
QUEUE1 = {E, G}
QUEUE2 = {A, B, D, C, F}
- 从
QUEUE1中删除E,所有E的邻居都已添加到QUEUE1,因此不会再添加它们。 访问所有节点,并且目标节点即E遇到QUEUE2。
QUEUE1 = {G}
QUEUE2 = {A, B, D, C, F, E}
现在,使用QUEUE2中可用的节点从E回溯到A。
最小路径为:A→B→C→E。