系列文章目录
前言
本示例展示了如何为装有手眼构型摄像头的机械臂或机械手执行和验证手眼校准。
一、概述
执行手眼校准有助于操作配备末端执行器(简称 “手”)的机械臂,该末端执行器依赖于摄像头提供的视觉数据。一旦完成了眼在手外的校准,机械臂就能准确地移动到摄像头识别的特定像素位置。这种能力是执行精确拾放任务(如分类、堆垛和分拣)的基础,即使在摄像机的确切位置和方向未知的情况下也是如此。
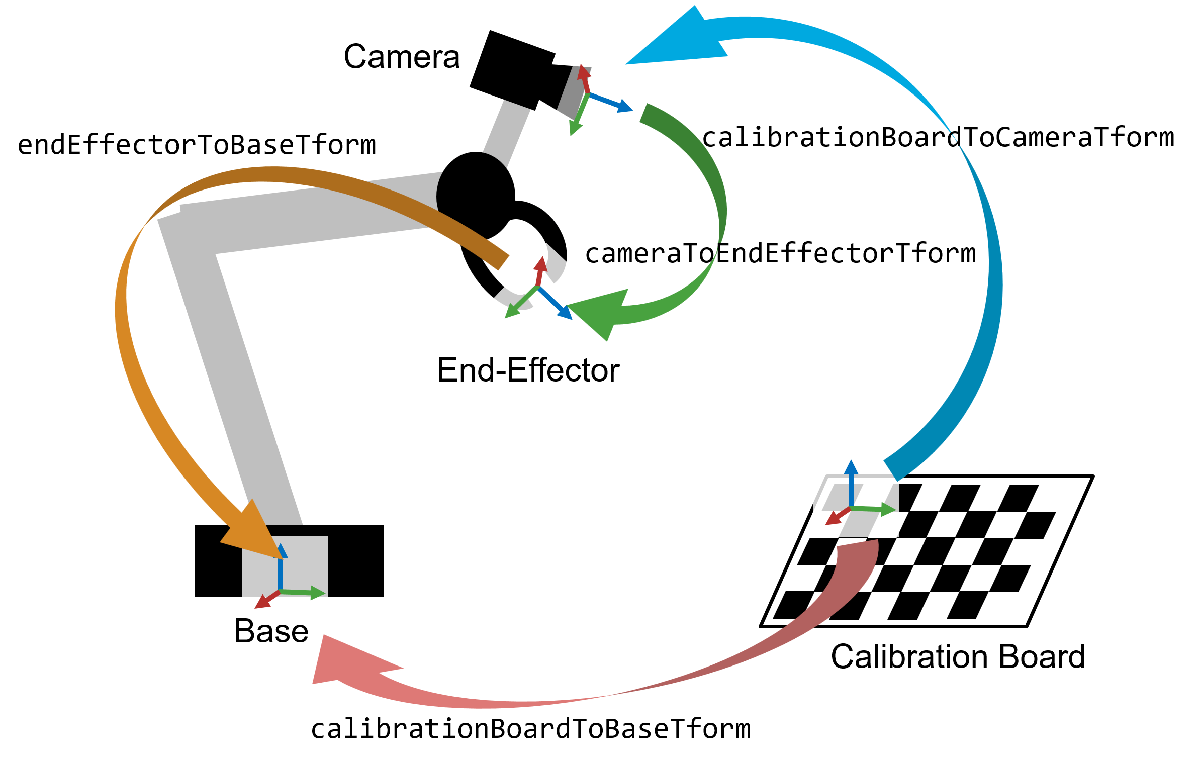
机器人-摄像机系统有两种构型:眼在手内和眼在手外。在眼在手内构型中,摄像头直接安装在机器人手臂的末端执行器上。相反,在眼在手的构型中,摄像头固定在一个静止的物体上,机器人手臂在其视野内。本示例主要针对眼在手内的构型进行手眼校准,但所述原理和技术也可适用于眼在手外的构型。
在本示例中,首先要校准摄像头,以确定其固有参数。然后进行手眼在手内校准。然后利用校准结果将图像点转换为机器人世界坐标系中的坐标。