系列文章目录
前言
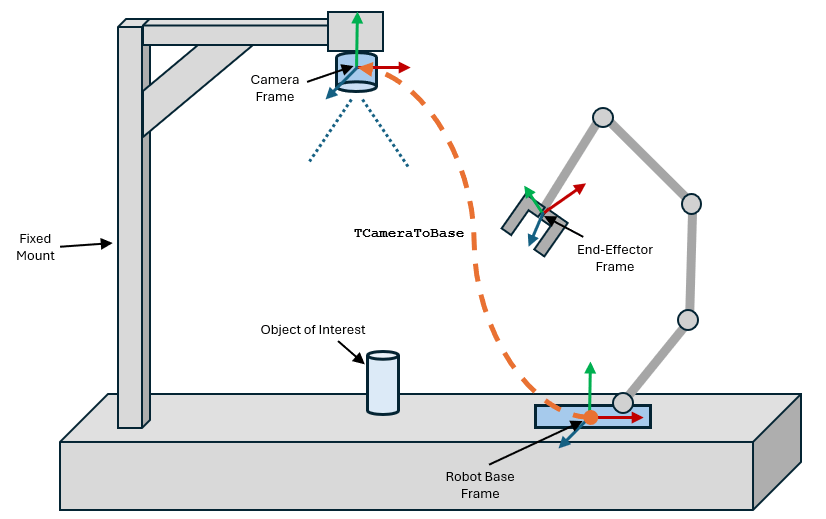
在拾取和放置任务中,例如垃圾桶拾取,通常会在环境中的固定位置安装摄像头,以便机器人操纵器检测工作区中的物体。基本感知管道使用该摄像头来估计目标物体相对于摄像头坐标系的姿态。然后将该姿态转换到机器人的基准坐标系,使机器人能够成功地用末端执行器拾取物体。要将物体的姿态转换到机器人基座坐标系,首先必须确定摄像机相对于机器人基座的姿态。本图显示了这种拾放构型以及所需的同质变换矩阵 TCameraToBase,它可将摄像机坐标系中的姿势变换到机器人底座坐标系中。
由于这些因素的影响,确定相机坐标系的准确姿态成为难题:
照相机制造商通常不会在设备上直接标系照相机坐标系,也不会提供相关规格或物理指标。此外,与取放操作相关的坐标系并不是相机坐标系本身,而是位于图像传感器或平面中心的坐标系。
假定相机坐标系以镜头为中心,并依靠人工用尺子测量的估算方法很容易出现误差。
鉴于上述挑战,本示例展示了通过使用手眼校准工作流程确定变换矩阵的过程,即安装在横梁上的摄像