目录
写在前面的话
我仿真实验用的车子底盘是阿克曼四轮驱动(前轮转向),试验过程中发现使用 DWB 控制器 无法进行转弯(按下图),而且很容易提前停止,然后想尝试 TEB 控制器,发现 navigation2 已经不支持(teb_controller 不适用 ros2 的问题),说是已经整合到 MPPI 控制器 了,所以有了这篇文章的尝试。
| 项目 | Value |
|---|---|
| 系统 | Ubuntu 22.04.5 LTS |
| ros2版本 | humble |
| 建图方案 | cartgrapher |
| 底盘驱动 | libgazebo_ros_ackermann_drive.so |

图片来源:Navigation2 导航插件
视频演示(B站)
navigation2 仿真(mppi controller) G果-CSDN
遇到的问题
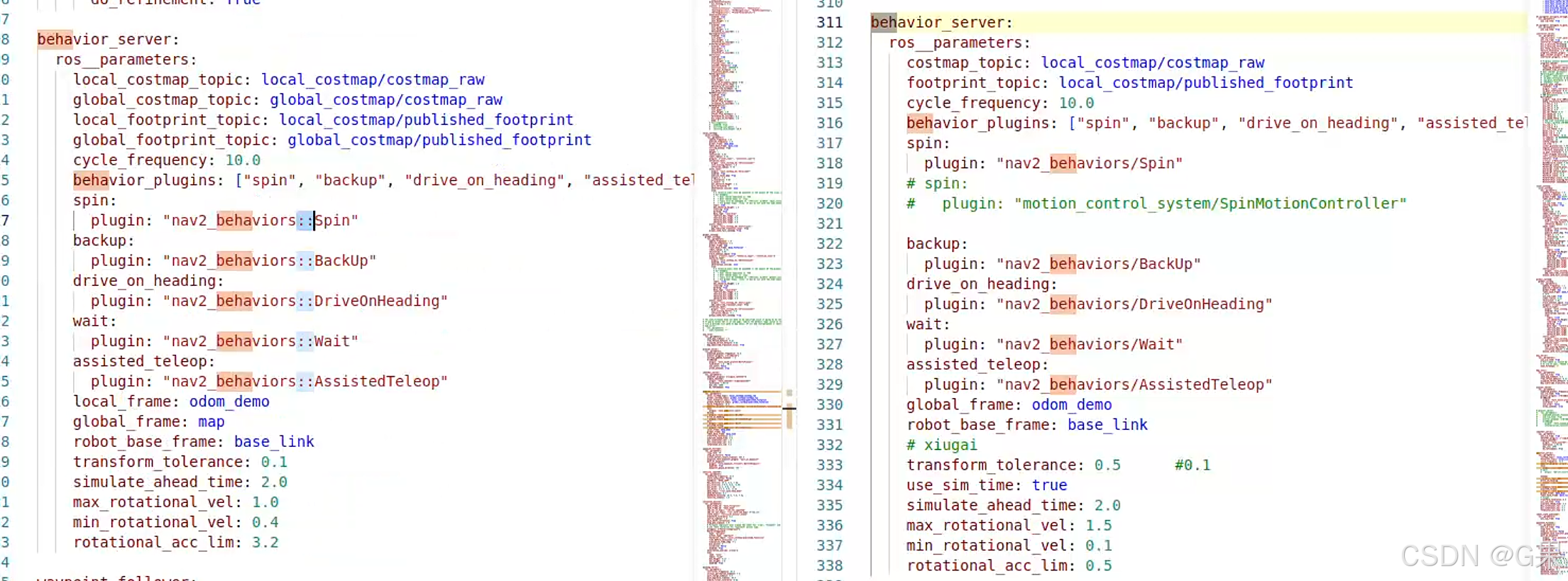
1. Failed to change state for node: behavior_server
终端报错输出(截取)
[component_container_isolated-1] [INFO] [1735056622.655721574] [lifecycle_manager_navigation]: Configuring behavior_server
[component_container_isolated-1] [INFO] [1735056622.655966294] [behavior_server]: Configuring
[component_container_isolated-1] [INFO] [1735056622.660589934] [behavior_server]: Creating behavior plugin spin of type nav2_behaviors::Spin
[component_container_isolated-1] [FATAL] [1735056622.660723154] [behavior_server]: Failed to create behavior spin of type nav2_behaviors::Spin. Exception: According to the loaded plugin descriptions the class nav2_behaviors::Spin with base class type nav2_core::Behavior does not exist. Declared types are nav2_behaviors/AssistedTeleop nav2_behaviors/BackUp nav2_behaviors/DriveOnHeading nav2_behaviors/Spin nav2_behaviors/Wait
[component_container_isolated-1] [ERROR] [1735056622.661070784] [lifecycle_manager_navigation]: Failed to change state for node: behavior_server
[component_container_isolated-1] [ERROR] [1735056622.661094527] [lifecycle_manager_navigation]: Failed to bring up all requested nodes. Aborting bringup.
nav2_params_mppi.yaml ( behavior_server )
解决方法
在 nav2_params_mppi.yaml 中找到 behavior_server 需要把 :: 改成 / 即可
behavior_server:
ros__parameters:
local_costmap_topic: local_costmap/costmap_raw
global_costmap_topic: global_costmap/costmap_raw
local_footprint_topic: local_costmap/published_footprint
global_footprint_topic: global_costmap/published_footprint
cycle_frequency: 10.0
behavior_plugins: ["spin", "backup", "drive_on_heading", "assisted_teleop", "wait"]
spin:
plugin: "nav2_behaviors/Spin"
backup:
plugin: "nav2_behaviors/BackUp"
drive_on_heading:
plugin: "nav2_behaviors/DriveOnHeading"
wait:
plugin: "nav2_behaviors/Wait"
assisted_teleop:
plugin: "nav2_behaviors/AssistedTeleop"
local_frame: odom_demo
global_frame: odom_demo #map
robot_base_frame: base_link
transform_tolerance: 0.1
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
2. 地图无法加载显示
我已经在 launch 文件中声明了调用地图,但是启动的 rviz2 上无法显示

报错输出和截图( 终端 和 rviz2 )
[component container isolated-1] [INFO] [1735106301.162350688] [local costmap.local costmap]: Timed out waiting for transform from base_footprint to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame -frame does not exit
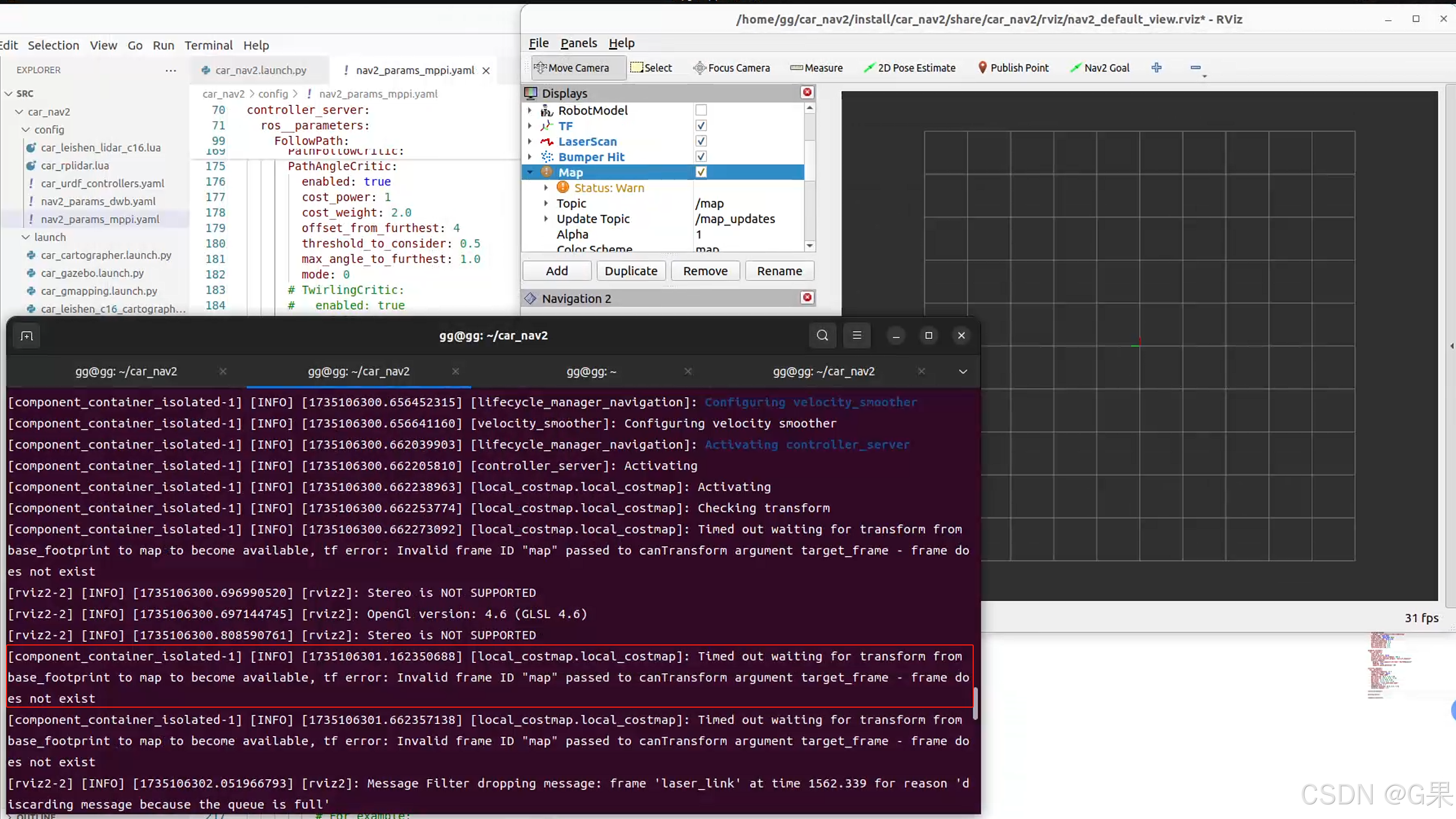
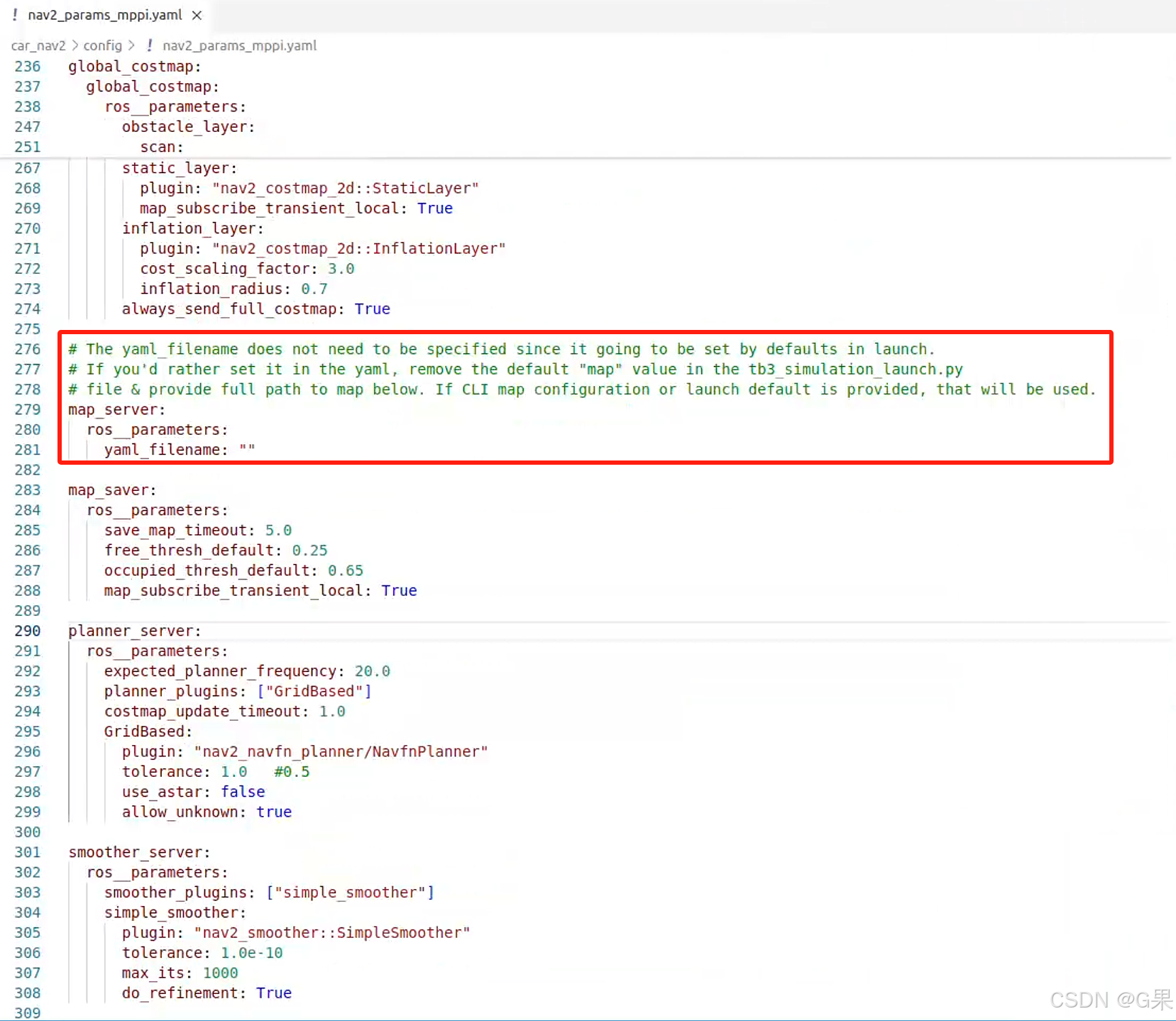
解决方法
在 nav2_param_mppi.yaml 加上下面这段代码即可
# The yaml_filename does not need to be specified since it going to be set by defaults in launch.
# If you'd rather set it in the yaml, remove the default "map" value in the tb3_simulation_launch.py
# file & provide full path to map below. If CLI map configuration or launch default is provided, that will be used.
map_server:
ros__parameters:
yaml_filename: ""
nav2_param_mppi.yaml ( map_server )
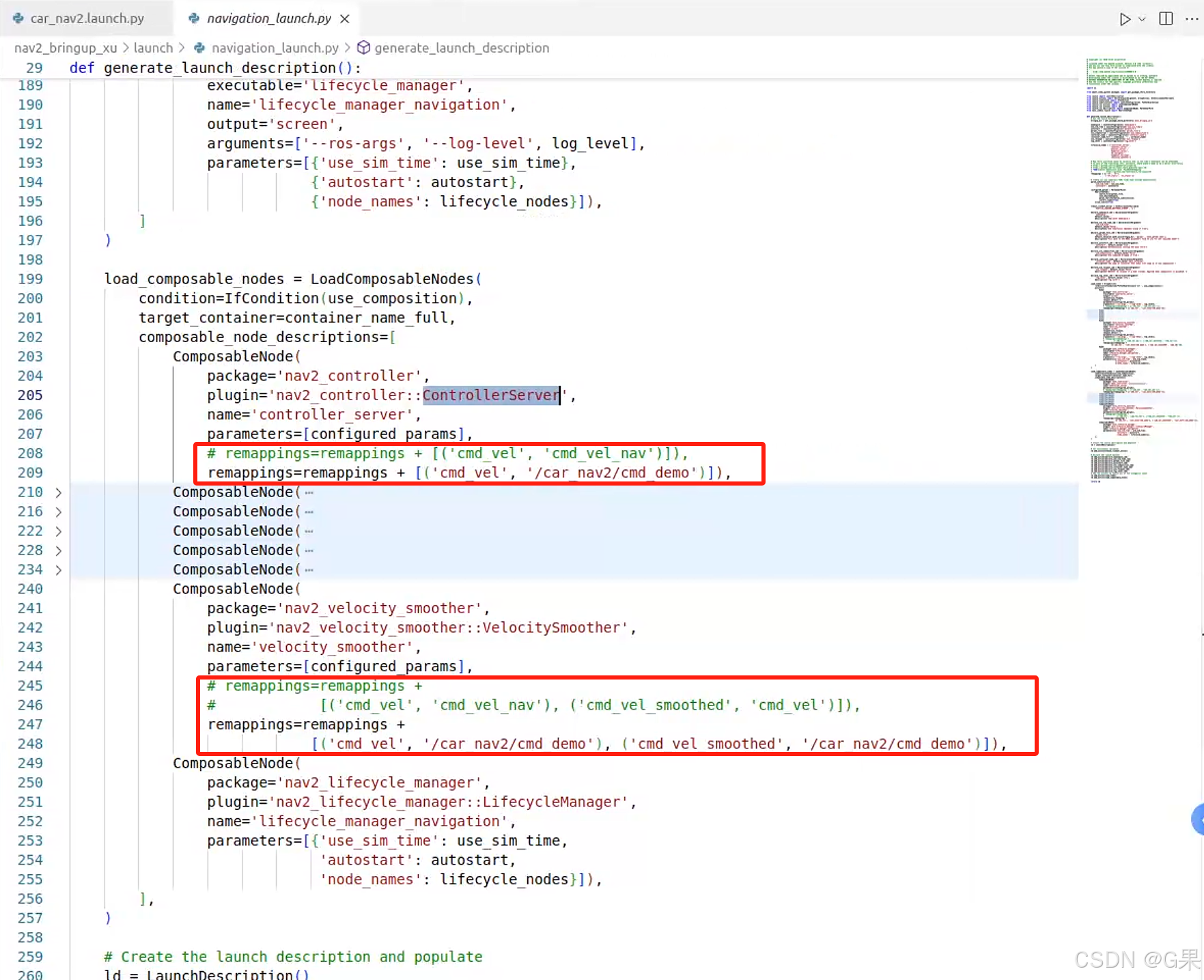
3. 规划路径后车子无法运动
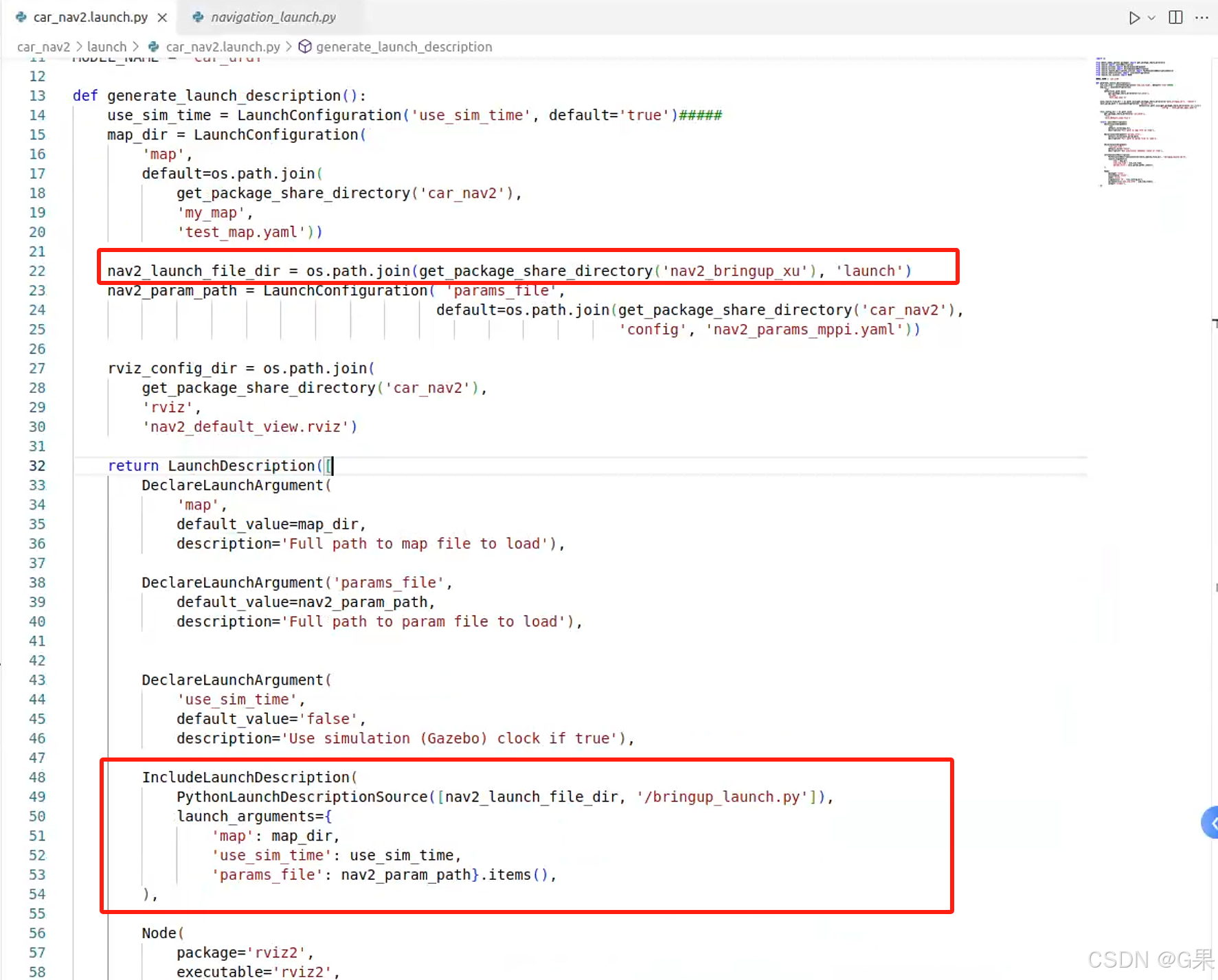
在 navigation2 中控制插件 ControllerServer 发布的速度话题默认是 /cmd_vel,需要进行 remapping,可以在 nav2_bringup 文件夹的 nvigation_launch.py 中找到进行修改;
之前安装 navigation2 是通过sudo apt install ros-humble-navigation2 进行安装,已经经过编译,只读无法修改;
因此,我们把 nav2_bringup 从官网中单独下载修改名称后重新本地编译,从而进行修改使用.
解决方法
- 下载 navigation2/tree/humble/nav2_bringup
- 改名 nav2_bringup >> nav2_bringup_xu (最好使用 vscode 软件之类的进行全局搜索修改替换)
- 找到 nvigation_launch.py 文件进行修改,将
/cmd_velremapping 为/car_nav2/cmd_demo(如下图所示) - 在启动导航的launch文件(本文是car_nav2.launch.py)中添加 nav2_bringup_xu 并启动
- 重新编译
colcon build
navigation_launch.py
car_nav2.launch.py
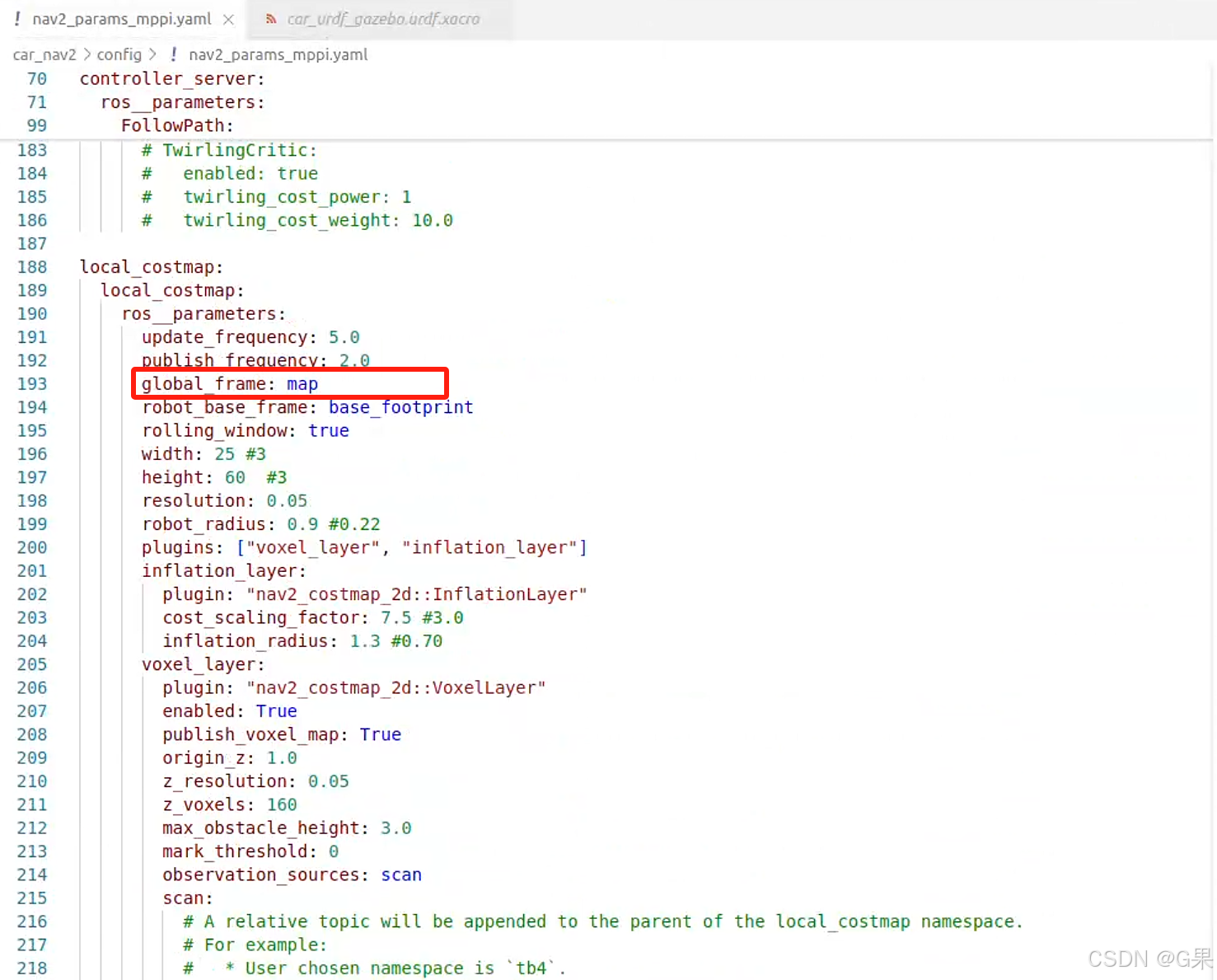
4. global_costmap 正常 local_costmap 无法显示
运行的时候发现 /map 正常 /local_costmap/costmap 话题都正常,但是在 rviz2 上无法显示,因为导航默认 rviz2 中 Fixed Frame 为 map,导致 local_costmap 无法与 map 建立联系.
解决方法
把 local_costmap 的 global_frame 修改成 map 即可
大致工程目录结构 car_nav2
├── car_nav2
│ ├── config
│ │ ├── car_leishen_lidar_c16.lua
│ │ ├── car_rplidar.lua
│ │ ├── car_urdf_controllers.yaml
│ │ ├── nav2_params_dwb.yaml
│ │ └── nav2_params_mppi.yaml
│ ├── launch
│ │ ├── car_cartographer.launch.py
│ │ ├── car_gazebo.launch.py
│ │ ├── car_gmapping.launch.py
│ │ ├── car_leishen_c16_cartographer.launch.py
│ │ ├── car_leishen_c16_gmapping.launch.py
│ │ ├── car_nav2.launch.py
│ │ ├── occupancy_grid.launch.py
│ │ ├── robot_state_publisher.launch.py
│ │ └── spawn_car.launch.py
│ ├── maps
│ │ ├── my_map.pgm
│ │ └── my_map.yaml
│ ├── meshes
│ │ ├── base_link.STL
│ │ ├── left_back_orient_Link.STL
│ │ ├── left_back_wheel_Link.STL
│ │ ├── left_front_orient_Link.STL
│ │ ├── left_front_wheel_Link.STL
│ │ ├── right_back_orient_Link.STL
│ │ ├── right_back_wheel_Link.STL
│ │ ├── right_front_orient_Link.STL
│ │ └── right_front_wheel_Link.STL
│ ├── my_map
│ │ ├── test_map.pgm
│ │ └── test_map.yaml
│ ├── nav2_car
│ │ └── init.py
│ ├── package.xml
│ ├── param
│ │ ├── burger.yaml
│ │ ├── car_urdf.yaml
│ │ ├── waffle_pi.yaml
│ │ └── waffle.yaml
│ ├── resource
│ │ └── car_nav2
│ ├── rviz
│ │ ├── car_cartographer.rviz
│ │ ├── lslidar_c16_cartographer.rviz
│ │ ├── nav2_default_view.rviz
│ │ └── nav2_namespaced_view.rviz
│ ├── setup.cfg
│ ├── setup.py
│ ├── test
│ │ ├── test_copyright.py
│ │ ├── test_flake8.py
│ │ └── test_pep257.py
│ ├── urdf
│ │ ├── car_urdf_gazebo.urdf.xacro
│ │ ├── car_urdf.urdf
│ │ ├── car_urdf.urdf.xacro
│ │ └── sensors
│ │ ├── camera_gazebo.xacro
│ │ ├── kinect_gazebo.xacro
│ │ ├── lidar_gazebo.xacro
│ │ └── rgbd_gazebo.xacro
│ └── worlds
│ └── my_world.world
完整的文件 nav2_params_mppi.yaml
amcl:
ros__parameters:
use_sim_time: True
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_link" ###
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 200.0 ###
laser_min_range: -200.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 4000 #2000
min_particles: 1000 #500
odom_frame_id: "odom_demo"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 5.0 #1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
bt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_footprint ###
odom_topic: /car_nav2/odom_demo
bt_loop_duration: 10
default_server_timeout: 20
wait_for_service_timeout: 1000
action_server_result_timeout: 900.0
navigators: ["navigate_to_pose", "navigate_through_poses"]
navigate_to_pose:
plugin: "nav2_bt_navigator::NavigateToPoseNavigator"
navigate_through_poses:
plugin: "nav2_bt_navigator::NavigateThroughPosesNavigator"
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
# plugin_lib_names is used to add custom BT plugins to the executor (vector of strings).
# Built-in plugins are added automatically
# plugin_lib_names: []
error_code_names:
- compute_path_error_code
- follow_path_error_code
controller_server:
ros__parameters:
controller_frequency: 20.0
costmap_update_timeout: 0.30
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugins: ["progress_checker"]
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]
use_realtime_priority: false
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
# Goal checker parameters
#precise_goal_checker:
# plugin: "nav2_controller::SimpleGoalChecker"
# xy_goal_tolerance: 0.25
# yaw_goal_tolerance: 0.25
# stateful: True
general_goal_checker:
stateful: True
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
FollowPath:
plugin: "nav2_mppi_controller::MPPIController"
time_steps: 56
model_dt: 0.05
batch_size: 2000
ax_max: 3.0
ax_min: -3.0
ay_max: 3.0
az_max: 3.5
vx_std: 0.2
vy_std: 0.2
wz_std: 0.4
vx_max: 0.5
vx_min: -0.35
vy_max: 0.5
wz_max: 1.9
iteration_count: 1
prune_distance: 1.7
transform_tolerance: 0.1
temperature: 0.3
gamma: 0.015
motion_model: "DiffDrive"
visualize: true
regenerate_noises: true
TrajectoryVisualizer:
trajectory_step: 5
time_step: 3
AckermannConstraints:
min_turning_r: 0.2
critics: [
"ConstraintCritic", "CostCritic", "GoalCritic",
"GoalAngleCritic", "PathAlignCritic", "PathFollowCritic",
"PathAngleCritic", "PreferForwardCritic"]
ConstraintCritic:
enabled: true
cost_power: 1
cost_weight: 4.0
GoalCritic:
enabled: true
cost_power: 1
cost_weight: 5.0
threshold_to_consider: 1.4
GoalAngleCritic:
enabled: true
cost_power: 1
cost_weight: 3.0
threshold_to_consider: 0.5
PreferForwardCritic:
enabled: true
cost_power: 1
cost_weight: 5.0
threshold_to_consider: 0.5
CostCritic:
enabled: true
cost_power: 1
cost_weight: 3.81
critical_cost: 300.0
consider_footprint: true
collision_cost: 1000000.0
near_goal_distance: 1.0
trajectory_point_step: 2
PathAlignCritic:
enabled: true
cost_power: 1
cost_weight: 14.0
max_path_occupancy_ratio: 0.05
trajectory_point_step: 4
threshold_to_consider: 0.5
offset_from_furthest: 20
use_path_orientations: false
PathFollowCritic:
enabled: true
cost_power: 1
cost_weight: 5.0
offset_from_furthest: 5
threshold_to_consider: 1.4
PathAngleCritic:
enabled: true
cost_power: 1
cost_weight: 2.0
offset_from_furthest: 4
threshold_to_consider: 0.5
max_angle_to_furthest: 1.0
mode: 0
# TwirlingCritic:
# enabled: true
# twirling_cost_power: 1
# twirling_cost_weight: 10.0
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: map
robot_base_frame: base_footprint
rolling_window: true
width: 25 #3
height: 60 #3
resolution: 0.05
robot_radius: 0.9 #0.22
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 7.5 #3.0
inflation_radius: 1.3 #0.70
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 1.0
z_resolution: 0.05
z_voxels: 160
max_obstacle_height: 3.0
mark_threshold: 0
observation_sources: scan
scan:
# A relative topic will be appended to the parent of the local_costmap namespace.
# For example:
# * User chosen namespace is `tb4`.
# * User chosen topic is `scan`.
# * Topic will be remapped to `/tb4/scan` without `local_costmap`.
# * Use global topic `/scan` if you do not wish the node namespace to apply
topic: /scan
max_obstacle_height: 3.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 50.0
raytrace_min_range: 0.0
obstacle_max_range: 50.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
always_send_full_costmap: True
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_footprint
robot_radius: 0.22
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
# A relative topic will be appended to the parent of the global_costmap namespace.
# For example:
# * User chosen namespace is `tb4`.
# * User chosen topic is `scan`.
# * Topic will be remapped to `/tb4/scan` without `global_costmap`.
# * Use global topic `/scan` if you do not wish the node namespace to apply
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.7
always_send_full_costmap: True
# The yaml_filename does not need to be specified since it going to be set by defaults in launch.
# If you'd rather set it in the yaml, remove the default "map" value in the tb3_simulation_launch.py
# file & provide full path to map below. If CLI map configuration or launch default is provided, that will be used.
map_server:
ros__parameters:
yaml_filename: ""
map_saver:
ros__parameters:
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: True
planner_server:
ros__parameters:
expected_planner_frequency: 20.0
planner_plugins: ["GridBased"]
costmap_update_timeout: 1.0
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 1.0 #0.5
use_astar: false
allow_unknown: true
smoother_server:
ros__parameters:
smoother_plugins: ["simple_smoother"]
simple_smoother:
plugin: "nav2_smoother::SimpleSmoother"
tolerance: 1.0e-10
max_its: 1000
do_refinement: True
behavior_server:
ros__parameters:
local_costmap_topic: local_costmap/costmap_raw
global_costmap_topic: global_costmap/costmap_raw
local_footprint_topic: local_costmap/published_footprint
global_footprint_topic: global_costmap/published_footprint
cycle_frequency: 10.0
behavior_plugins: ["spin", "backup", "drive_on_heading", "assisted_teleop", "wait"]
spin:
plugin: "nav2_behaviors/Spin"
backup:
plugin: "nav2_behaviors/BackUp"
drive_on_heading:
plugin: "nav2_behaviors/DriveOnHeading"
wait:
plugin: "nav2_behaviors/Wait"
assisted_teleop:
plugin: "nav2_behaviors/AssistedTeleop"
local_frame: odom_demo
global_frame: odom_demo #map
robot_base_frame: base_link
transform_tolerance: 0.1
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
waypoint_follower:
ros__parameters:
loop_rate: 20
stop_on_failure: false
action_server_result_timeout: 900.0
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200
velocity_smoother:
ros__parameters:
smoothing_frequency: 20.0
scale_velocities: False
feedback: "OPEN_LOOP"
max_velocity: [0.5, 0.0, 2.0]
min_velocity: [-0.5, 0.0, -2.0]
max_accel: [2.5, 0.0, 3.2]
max_decel: [-2.5, 0.0, -3.2]
odom_topic: "/car_nav2/odom_demo"
odom_duration: 0.1
deadband_velocity: [0.0, 0.0, 0.0]
velocity_timeout: 1.0
collision_monitor:
ros__parameters:
base_frame_id: "base_footprint"
odom_frame_id: "odom_demo"
cmd_vel_in_topic: "cmd_vel_smoothed"
cmd_vel_out_topic: "/car_nav2/cmd_demo" #"cmd_vel"
state_topic: "collision_monitor_state"
transform_tolerance: 0.2
source_timeout: 1.0
base_shift_correction: True
stop_pub_timeout: 2.0
# Polygons represent zone around the robot for "stop", "slowdown" and "limit" action types,
# and robot footprint for "approach" action type.
polygons: ["FootprintApproach"]
FootprintApproach:
type: "polygon"
action_type: "approach"
footprint_topic: "local_costmap/published_footprint"
time_before_collision: 1.2
simulation_time_step: 0.1
min_points: 6
visualize: False
enabled: True
observation_sources: ["scan"]
scan:
type: "scan"
topic: "scan"
min_height: 0.15
max_height: 2.0
enabled: True
docking_server:
ros__parameters:
controller_frequency: 50.0
initial_perception_timeout: 5.0
wait_charge_timeout: 5.0
dock_approach_timeout: 30.0
undock_linear_tolerance: 0.05
undock_angular_tolerance: 0.1
max_retries: 3
base_frame: "base_link"
fixed_frame: "odom_demo"
dock_backwards: false
dock_prestaging_tolerance: 0.5
# Types of docks
dock_plugins: ['simple_charging_dock']
simple_charging_dock:
plugin: 'opennav_docking::SimpleChargingDock'
docking_threshold: 0.05
staging_x_offset: -0.7
use_external_detection_pose: true
use_battery_status: false # true
use_stall_detection: false # true
external_detection_timeout: 1.0
external_detection_translation_x: -0.18
external_detection_translation_y: 0.0
external_detection_rotation_roll: -1.57
external_detection_rotation_pitch: -1.57
external_detection_rotation_yaw: 0.0
filter_coef: 0.1
# Dock instances
# The following example illustrates configuring dock instances.
# docks: ['home_dock'] # Input your docks here
# home_dock:
# type: 'simple_charging_dock'
# frame: map
# pose: [0.0, 0.0, 0.0]
controller:
k_phi: 3.0
k_delta: 2.0
v_linear_min: 0.15
v_linear_max: 0.15
use_collision_detection: true
costmap_topic: "/local_costmap/costmap_raw"
footprint_topic: "/local_costmap/published_footprint"
transform_tolerance: 0.1
projection_time: 5.0
simulation_step: 0.1
dock_collision_threshold: 0.3
loopback_simulator:
ros__parameters:
base_frame_id: "base_footprint"
odom_frame_id: "odom_demo"
map_frame_id: "map"
scan_frame_id: "laser_link" # "base_scan" # tb4_loopback_simulator.launch.py remaps to 'rplidar_link'
update_duration: 0.02