
深度学习实战车道线检测
这里写目录标题
车道线原理
Lane - Detection是一种快速高效的车道线检测算法,其核心目标是在保证较高检测精度的同时,显著提升检测速度,以满足实际应用场景(如自动驾驶)对实时性的要求。以下详细介绍其实现原理:
整体架构设计
UFLD采用了一种简单而高效的架构,主要由骨干网络(Backbone)、特征融合层和分类头(Classification Head)三部分组成。骨干网络负责从输入图像中提取特征,特征融合层对提取的特征进行整合,分类头则根据融合后的特征进行车道线的分类预测。
核心原理步骤
1. 特征提取(骨干网络)
- 选择合适的骨干网络:通常会选用轻量级的卷积神经网络(CNN)作为骨干网络,如ResNet - 18 等。这些网络具有较少的参数和计算量,能够快速地从输入图像中提取出有效的特征。
- 特征层次:骨干网络会输出不同层次的特征图,浅层特征图包含更多的细节信息,如边缘、纹理等;深层特征图则具有更强的语义信息,能够更好地表示车道线的整体结构和类别。
2. 特征融合
- 特征拼接:将骨干网络输出的不同层次的特征图进行拼接,整合不同层次的特征信息,以充分利用细节信息和语义信息,提高车道线检测的准确性。
- 降维处理:为了减少计算量,对拼接后的特征图进行降维操作,例如使用 1×1 卷积核进行卷积,降低特征图的通道数。
3. 车道线表示与分类
- 基于行的表示方法:UFLD采用了一种基于行的车道线表示方法,将图像按行划分成多个水平切片,对于每一行,预测车道线可能出现的位置。这种表示方法将车道线检测问题转化为一个分类问题,大大简化了模型的复杂度。
- 分类头设计:在特征融合层的输出上连接一个分类头,分类头由多个卷积层和全连接层组成,用于对每一行的每个位置进行分类,判断该位置是否属于车道线。分类头的输出是一个概率图,每个位置的值表示该位置属于车道线的概率。
4. 损失函数
- 交叉熵损失:使用交叉熵损失函数来衡量模型预测的车道线概率分布与真实标签之间的差异。交叉熵损失能够有效地引导模型学习到正确的车道线分类边界,使模型的预测结果尽可能接近真实标签。
- 辅助损失(可选):为了进一步提高模型的性能,还可以引入一些辅助损失,如车道线的连续性损失、平滑性损失等,以保证检测到的车道线具有良好的连续性和平滑性。
5. 后处理
- 阈值筛选:根据分类头输出的概率图,设置一个阈值,将概率大于阈值的位置判定为车道线像素,小于阈值的位置判定为非车道线像素,得到二值化的车道线图像。
- 车道线拟合:对二值化图像中的车道线像素进行拟合,通常采用多项式拟合的方法,得到车道线的数学模型,如二次多项式或三次多项式,以更准确地表示车道线的形状和位置。
速度优势的来源
- 简化的车道线表示:基于行的表示方法将车道线检测问题转化为简单的分类问题,避免了复杂的目标检测和分割操作,减少了计算量。
- 轻量级骨干网络:选用轻量级的卷积神经网络作为骨干网络,减少了模型的参数数量和计算复杂度,提高了特征提取的速度。
- 高效的特征融合:通过简单的特征拼接和降维操作,快速整合不同层次的特征信息,避免了复杂的特征融合方法带来的计算开销。
软件实现
@staticmethod
def process_output(output, cfg):
# Parse the output of the model
processed_output = np.squeeze(output[0])
print(processed_output.shape)
print(np.min(processed_output), np.max(processed_output))
print(processed_output.reshape((1,-1)))
processed_output = processed_output[:, ::-1, :]
prob = scipy.special.softmax(processed_output[:-1, :, :], axis=0)
idx = np.arange(cfg.griding_num) + 1
idx = idx.reshape(-1, 1, 1)
loc = np.sum(prob * idx, axis=0)
processed_output = np.argmax(processed_output, axis=0)
loc[processed_output == cfg.griding_num] = 0
processed_output = loc
col_sample = np.linspace(0, 800 - 1, cfg.griding_num)
col_sample_w = col_sample[1] - col_sample[0]
lanes_points = []
lanes_detected = []
max_lanes = processed_output.shape[1]
for lane_num in range(max_lanes):
lane_points = []
# Check if there are any points detected in the lane
if np.sum(processed_output[:, lane_num] != 0) > 2:
lanes_detected.append(True)
# Process each of the points for each lane
for point_num in range(processed_output.shape[0]):
if processed_output[point_num, lane_num] > 0:
lane_point = [int(processed_output[point_num, lane_num] * col_sample_w * cfg.img_w / 800) - 1, int(cfg.img_h * (cfg.row_anchor[cfg.cls_num_per_lane-1-point_num]/288)) - 1 ]
lane_points.append(lane_point)
else:
lanes_detected.append(False)
lanes_points.append(lane_points)
return np.array(lanes_points), np.array(lanes_detected)
安装环境与文件说明

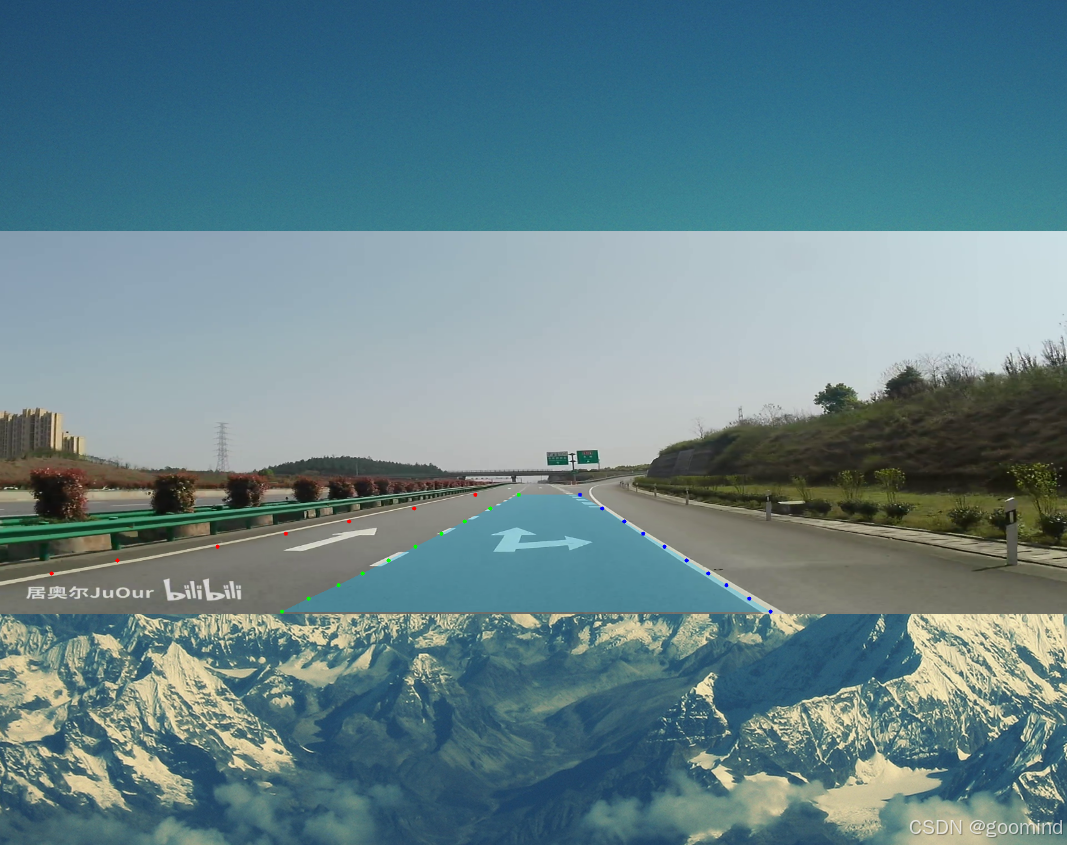
实验测试
扫描二维码关注公众号,回复:
17555795 查看本文章





结束语
由于博主能力有限,博文中提及的方法即使经过试验,也难免会有疏漏之处。希望您能热心指出其中的错误,以便下次修改时能以一个更完美更严谨的样子,呈现在大家面前。同时如果有更好的实现方法也请您不吝赐教。