目录
关于Isaac Gym(OmniIsaacGymEnvs)与Isaac Sim(Isaac Lab)
Isaac Sim安装成功确认,源代码连接,注意路径一定要和本地路径保持一致,很多报错都是因为直接复制代码没有确认路径是否正确!
git clone好文件包之后建立Symbolic link。同样要注意路径问题!github上很多类似问题,直接复制代码没有仔细查看导致报错。
Update(04-02-2025)
基于isaac sim4.5.0的isaac lab配置教程:IsaacLab最新2025教程-环境配置(IsaacSim 4.5.0/Ubuntu22.04) 原创-CSDN博客
Isaac Sim今年一月份推出了最新版本4.5.0,Isaac Lab也更新了一些contact-rich tasks,这篇博客的内容会在今年十月份之后停止维护。明天会出最新的安装过程,但是这个版本的一些内容,比如nucleus server的Nvidia asset还是可以继续用的,目测新版本改动有点复杂,已经在做项目的可以继续用现在的版本。
前言
并行化训练对于强化学习的采样效率有着很大的优势,Nidia借助自身产品的优势推出了与GPU并行化训练适配的物理仿真器Isaac系列。从最初的Isaac Gym+OmniIsaacGymEnvs的强化学习环境到现在更加全面且具有野心Isaac Sim+Isaac Lab,已经接触一年有余,开贴记录自己的项目开发经验,希望能与更多的人分享经验,推动具身智能社区发展。文章内容主要基于Isaac Sim的官方文档并自己的实际经验。
关于Isaac Gym(OmniIsaacGymEnvs)与Isaac Sim(Isaac Lab)
. Isaac Sim是新推出的仿真平台,集成了全新的UI界面并且提供了一站式的end-to-end的真机部署前的仿真流程。Isaac Lab则取代了OmniIsaacGymEnvs, 提供了与Isaac Sim适配的robot learning环境与基础的任务设置,例如:locomotion,manipulation与倒立摆等经典任务。在OmniIsaacGymEnvs的基础上,Isaac Lab在保留了rl-games的同时增加了stable baseline3,SKRL等多个强化学习算法库。另外还集成了一些Imitation Learning和Teleoperation的框架。但是,现阶段的环境比较有限,还处于开发阶段,所以停止维护的OmniIsaacGymEnvs所开发的环境样本仍然具有很大的参考价值。
Isaac Sim是仿真器(simulator),Isaac Lab是基于Isaac Sim这个仿真器开发的强化学习框架,包含了适用于并行化环境的API与适配各个强化学习库的wrapper。所以想要安装Isaac Lab首先需要安装并了解Isaac Sim。
Isaac Sim安装(Isaac Sim官方网站)
首先需要安装一个workstation,在workstation中安装Isaac Sim和配套的各种组件。类似于Steam和黑神话及其相关的DLC。后续的写代码基本使用vs code,这里不详细介绍,大家可以直接搜索vs code在ubuntu的下载方法,很简单。
Workstation安装
点开安装连接之后,点击Direct link:Linux就会自动下载安装包。
已经看到安装包

注意在linux环境下,我们需要把安装包放到桌面这种可以访问的文件夹中,并且给予执行权限,这次下载位置在~/Downloads文件夹下:
cd Downloads/
sudo chmod +x omniverse-launcher-linux.AppImageIsaac Sim安装
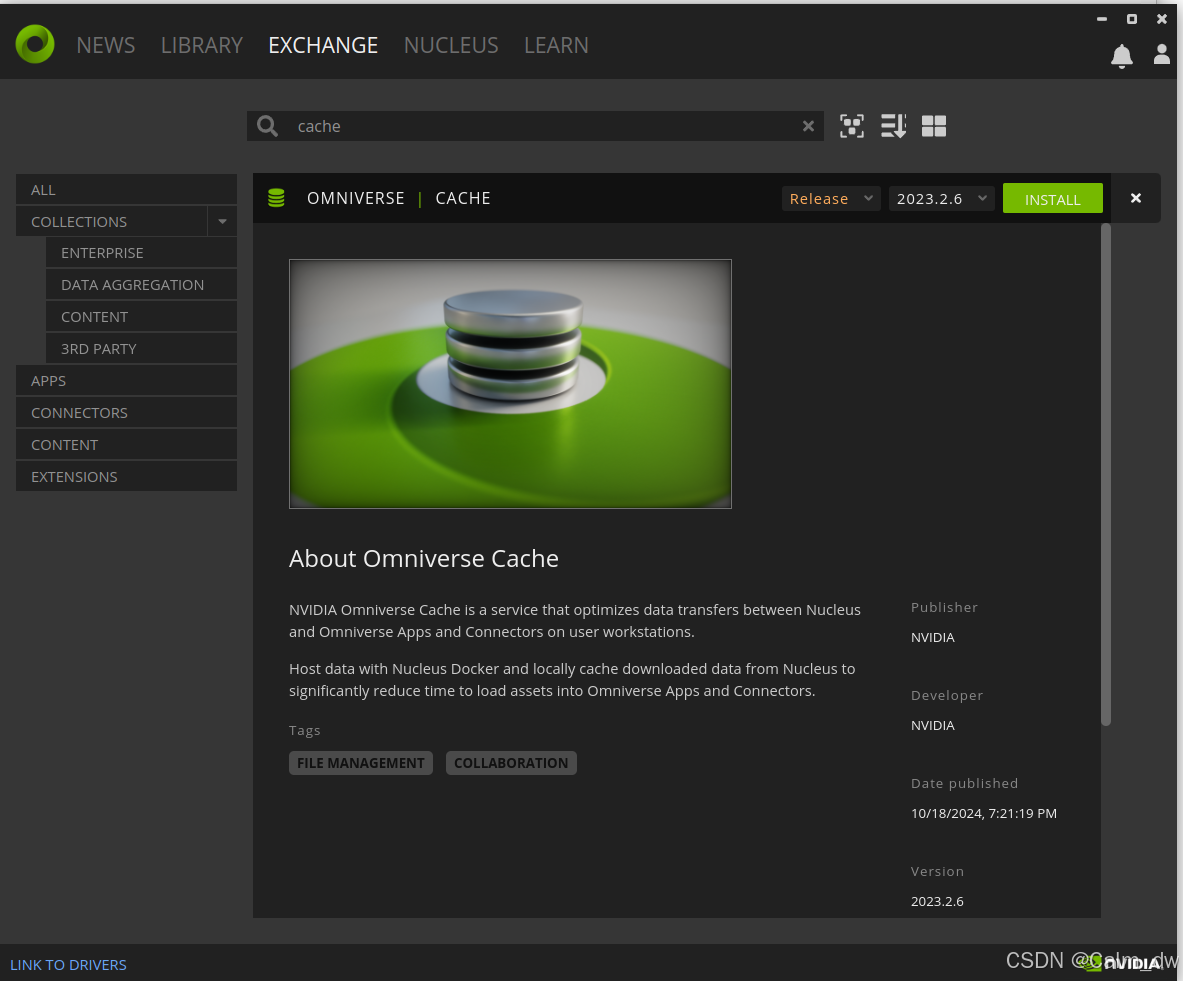
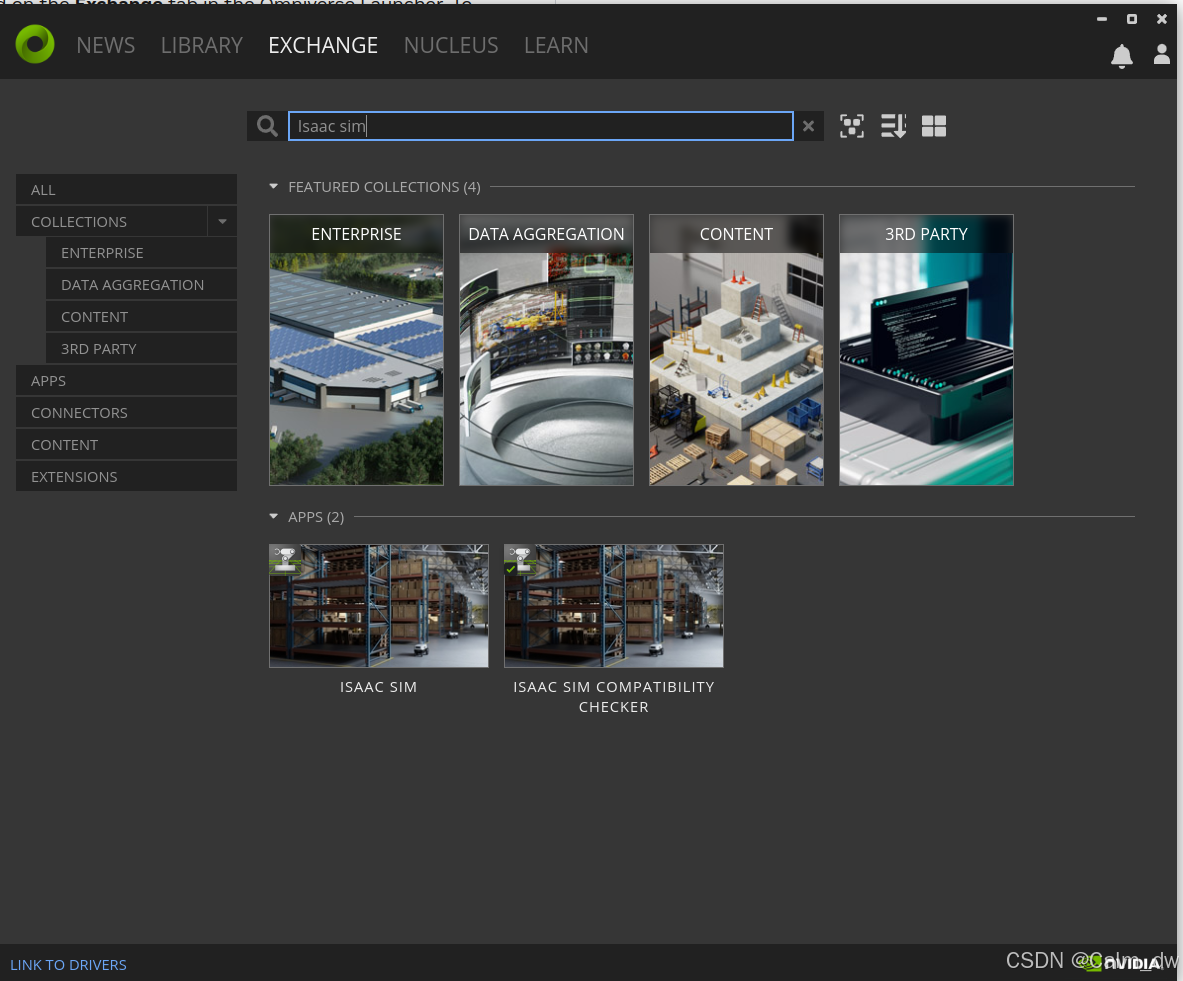
给予权限之后就可以鼠标双击已经下载的安装包,然后注册一个Nidia账号登陆就可以了。然后我们在Launcher的Exchange栏目下搜索Cache,Nucleus(类似云服务器,存储Isaac Sim公开的许多模型资源)和Isaac Sim,然后全部点击install就可以了。
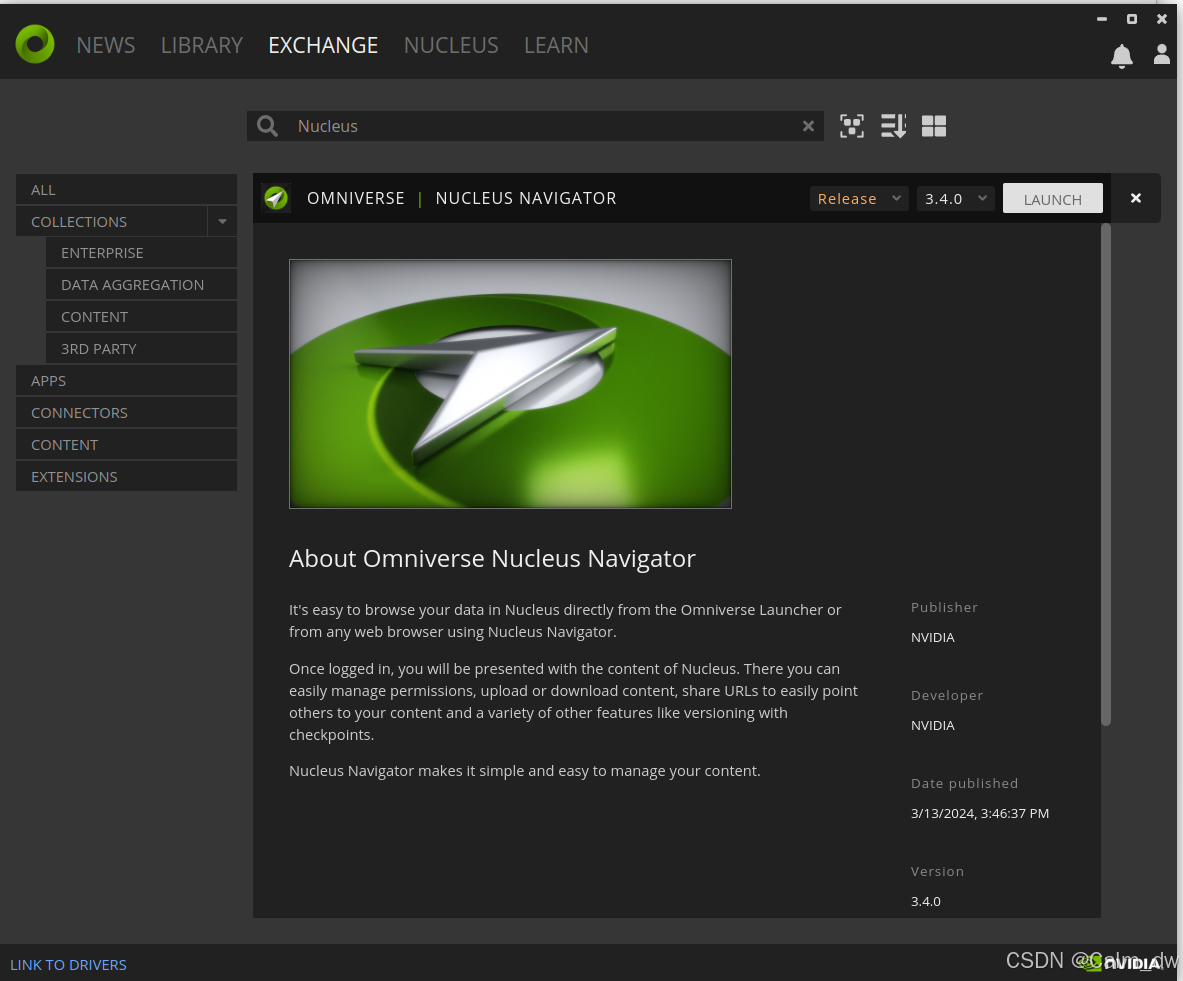
Nucleus打开时候需要注册本地账号,这个可以随便写,更多是保存自己的模型资源在该账号下,高校或者企业云服务器比较常用。
Isaac Sim compatibility checker是一个小组件,下载之后可以运行检查一下本地机器的配置是否和最低要求适配,第一次安装可以使用一下玩玩。
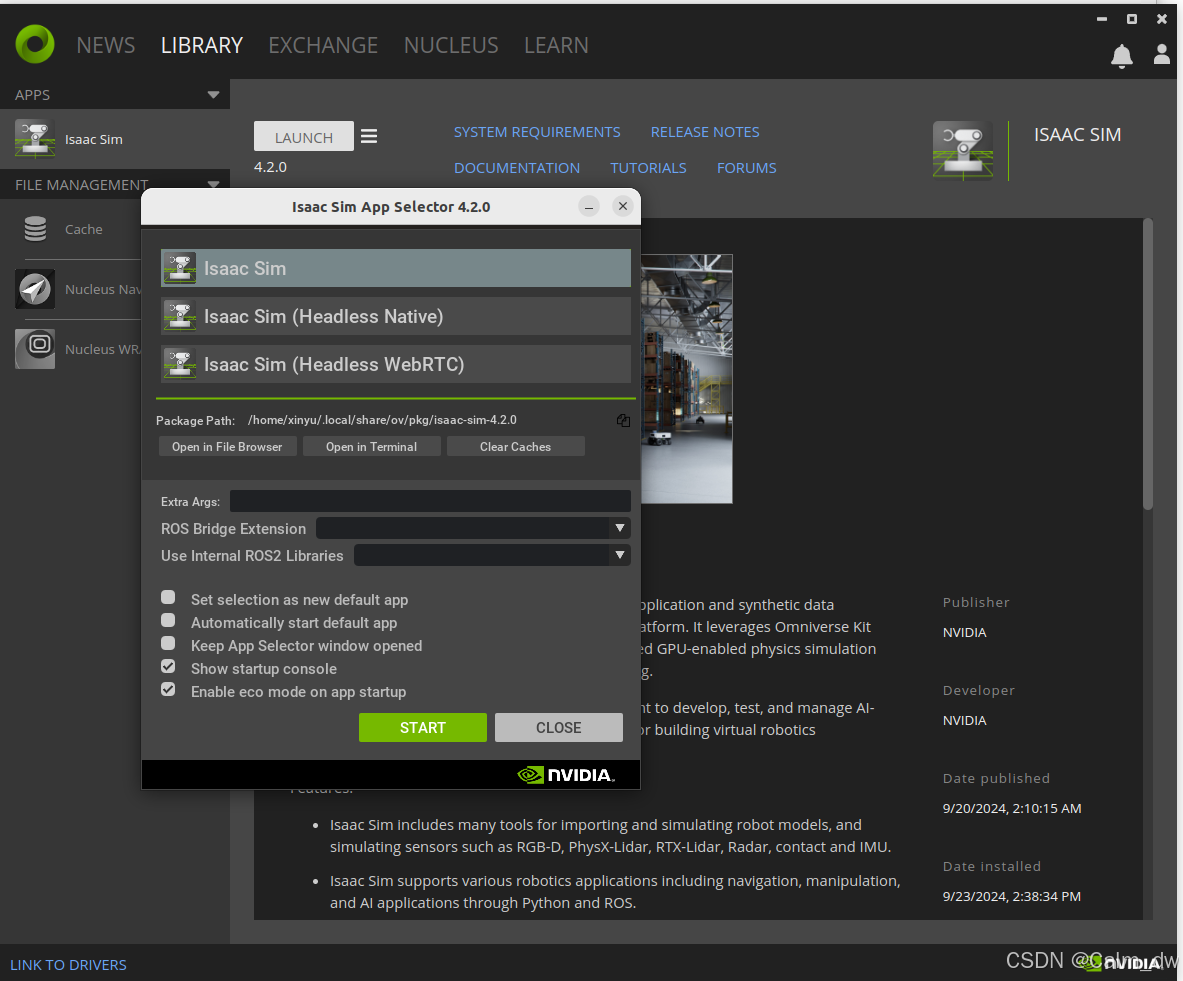
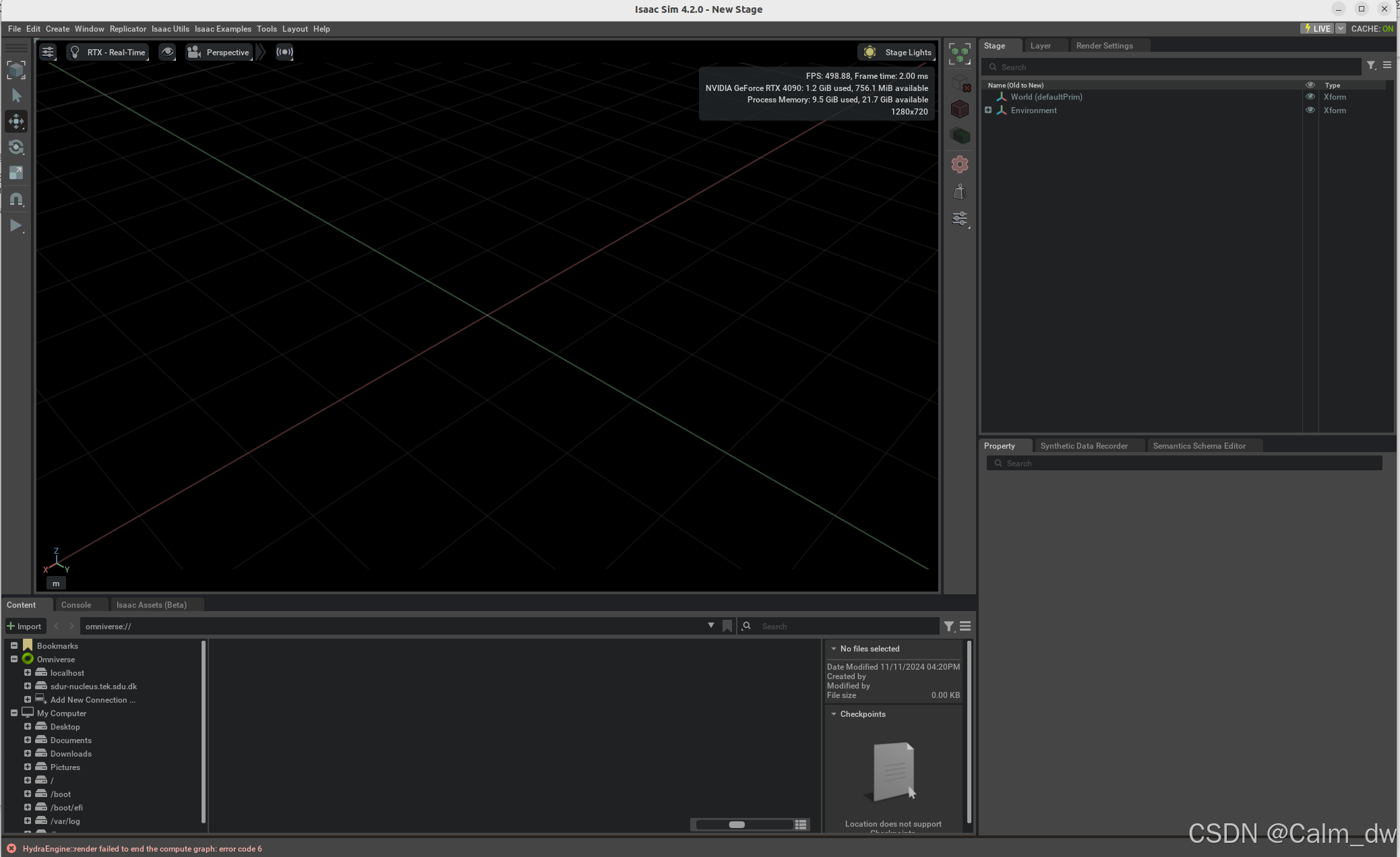
全部安装完成之后就可以点击LIBRARY栏目launch Isaac Sim了,选择Isaac Sim就可以,其他两项是不包括GUI界面的,打开之后的界面如下
Isaac Sim安装成功确认,源代码连接,注意路径一定要和本地路径保持一致,很多报错都是因为直接复制代码没有确认路径是否正确!
# **代表下载的isaac sim版本,最新的是4.2.0
export ISAACSIM_PATH="${HOME}/.local/share/ov/pkg/isaac-sim-**"
#运行isaac sim检验是否正常运行
${ISAACSIM_PATH}/isaac-sim.sh# 连接isaac sim对应的python环境。isaac sim会配置相关的python环境,避免和本地环境冲突出现意外问题。
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"
# 检验isaac sim对应的python环境是否运行良好
${ISAACSIM_PYTHON_EXE} -c "print('Isaac Sim configuration works well.')"
# 检验isaac sim是否可以通过python脚本启动
${ISAACSIM_PYTHON_EXE} ${ISAACSIM_PATH}/standalone_examples/api/omni.isaac.core/add_cubes.py初学者可以继续学习Isaac Sim的一些基本操作,有助于理解Isaac Lab。
Isaac Lab安装
全面的安装教程参考官方文档。Isaac Lab可以当作是在Isaac Sim路径下的一个包来安装。Isaac Sim的默认安装路径一般为:~/.local/share/ov/pkg/isaac-sim-xxx,本文路径为:~/.local/share/ov/pkg/isaac-sim-4.2.0。在Isaac Sim安装验证完成之后,进入到对应的文件夹下安装Isaac Lab:
cd ${ISAACSIM_PATH}
git clone [email protected]:isaac-sim/IsaacLab.gitgit clone好文件包之后建立Symbolic link。同样要注意路径问题!github上很多类似问题,直接复制代码没有仔细查看导致报错。
# 进入到Isaac Lab文件夹
cd IsaacLab
# 建立连接,注意home后面的文件夹要输入本地的username以及下载的isaac sim版本,记不住可以点开对应连接找一下
ln -s /home/本地usrname/.local/share/ov/pkg/isaacsim版本搭建conda环境(可选但是建议使用)
可以先下载一个miniconda,再来搭建conda环境。conda环境可以防止搞乱默认python环境,而且后续开发过程中会涉及到不同开发版本环境而且可以设置一些快捷键和连接在conda环境中,非常方便。
# 默认名称就是“isaaclab”
./isaaclab.sh --conda # or "./isaaclab.sh -c"
# 指定环境名称
./isaaclab.sh --conda my_env
# 安装完成之后激活环境,isaaclab需要替换为“my_env"指定的环境名称
conda activate isaaclabIsaac Lab环境安装
# 安装一些前置包
sudo apt install cmake build-essential
# 安装
./isaaclab.sh --installIsaac Lab环境确认
# 安装完成之后可以试运行一个demo验证是否成功,“./isaaclab.sh"是在conda环境和默认环境通用的指令
./isaaclab.sh -p source/standalone/tutorials/00_sim/create_empty.py
# 如果是在conda环境中安装,可以直接使用python
python source/standalone/tutorials/00_sim/create_empty.py这就是整个安装过程了!初学者如果对linux(Ubuntu)不熟悉可以直接搜索每一条的指令的用法,了解linux和github的基本用法。pip install的安装方式还在测试中,后续Nvidia可能会上线,个人更熟悉git clone包然后install的过程,而且这样安装的包在vs code中可以直接跳转源代码更加方便。
后续会慢慢更新自己在使用Isaac Lab的过程以及遇到的一些问题和经验,同时会分布之前开发的peg-in-hole环境,最后也期待大家的问题和经验。