YOLOv11 在遥感图像分割中的应用:建筑物、汽车与道路的精准识别
遥感图像分割是地理信息系统(GIS)、智慧城市规划和灾害监测等领域的核心技术。随着深度学习的发展,YOLO(You Only Look Once)系列模型因其高效的单阶段检测能力,逐渐被应用于目标检测与实例分割任务。YOLOv8作为Ultralytics团队的最新成果,在遥感图像分割任务中展现出了显著优势,尤其在建筑物、汽车和道路的识别中表现卓越。

一、遥感图像分割的独特挑战
遥感图像通常具备以下特点,使得传统分割模型面临巨大挑战:
-
高分辨率与大尺寸
遥感影像单张可达数万像素(如0.3m/pixel的卫星影像),直接输入模型会导致显存爆炸。需采用分块处理(Tiling)或动态缩放技术,例如将图像切割为1024x1024的子图,再通过滑动窗口拼接结果。 -
多光谱数据融合
除RGB三通道外,遥感数据常包含近红外(NIR)、短波红外(SWIR)等波段。YOLOv8可通过修改输入通道数(如4通道输入),结合波段特征增强(如NDVI植被指数)提升建筑物与植被的区分度。 -
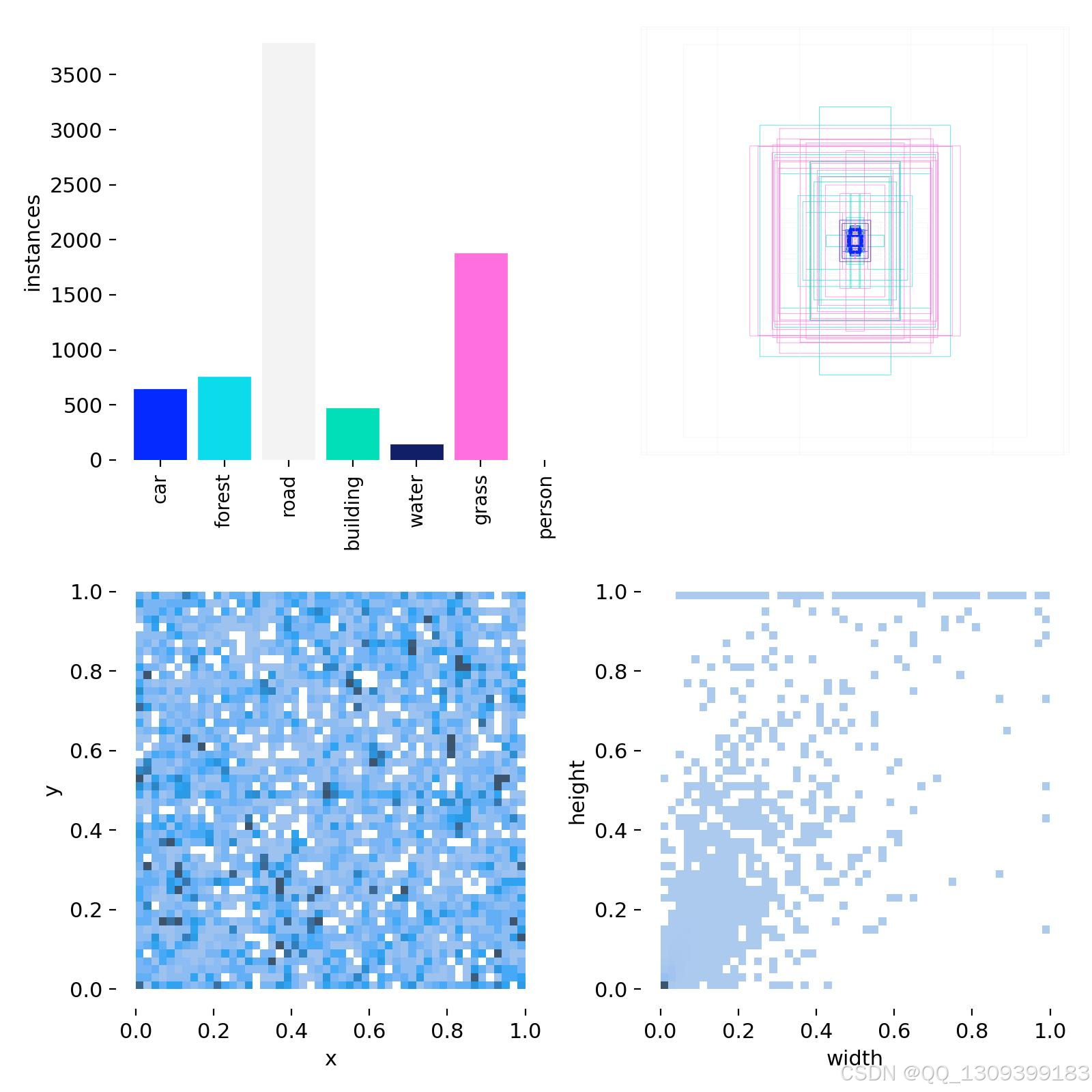
类别分布极度不均衡
道路和建筑物可能占据图像的60%以上区域,而汽车等小目标占比不足1%。需采用加权损失函数(如Focal Loss)或过采样策略,平衡模型对不同类别的关注度。 -
复杂背景干扰
阴影、云层覆盖和相似材质(如水泥屋顶与道路)会导致误分割。引入注意力机制(如CBAM模块)可帮助模型聚焦关键区域。
二、YOLOv11 的核心技术优势
YOLOv8在YOLOv5基础上进行了多项改进,使其更适合遥感分割任务:
-
高效的主干网络
采用CSPDarknet53+结构,通过跨阶段局部连接减少计算冗余。在COCO数据集上,YOLOv8-Seg的mAP50-95达到44.9%,推理速度达50 FPS(Tesla V100)。 -
动态标签分配策略
引入Task-Aligned Assigner,根据分类得分与IoU的联合权重动态分配正样本,缓解密集小目标(如停车场中的汽车)的漏检问题。 -
多尺度特征融合优化
改进的PAN-FPN结构支持从3个不同尺度(P3-P5)提取特征,结合BiFPN加权融合机制,提升对大小差异显著目标(如宽阔道路与小型车辆)的捕捉能力。 -
实例分割精度提升
采用Mask Repulsion Loss,强制不同实例的掩模预测相互排斥,解决建筑物边缘粘连问题。在SpaceNet数据集测试中,建筑物分割IoU可达82.3%。
三、遥感分割任务的关键实现步骤
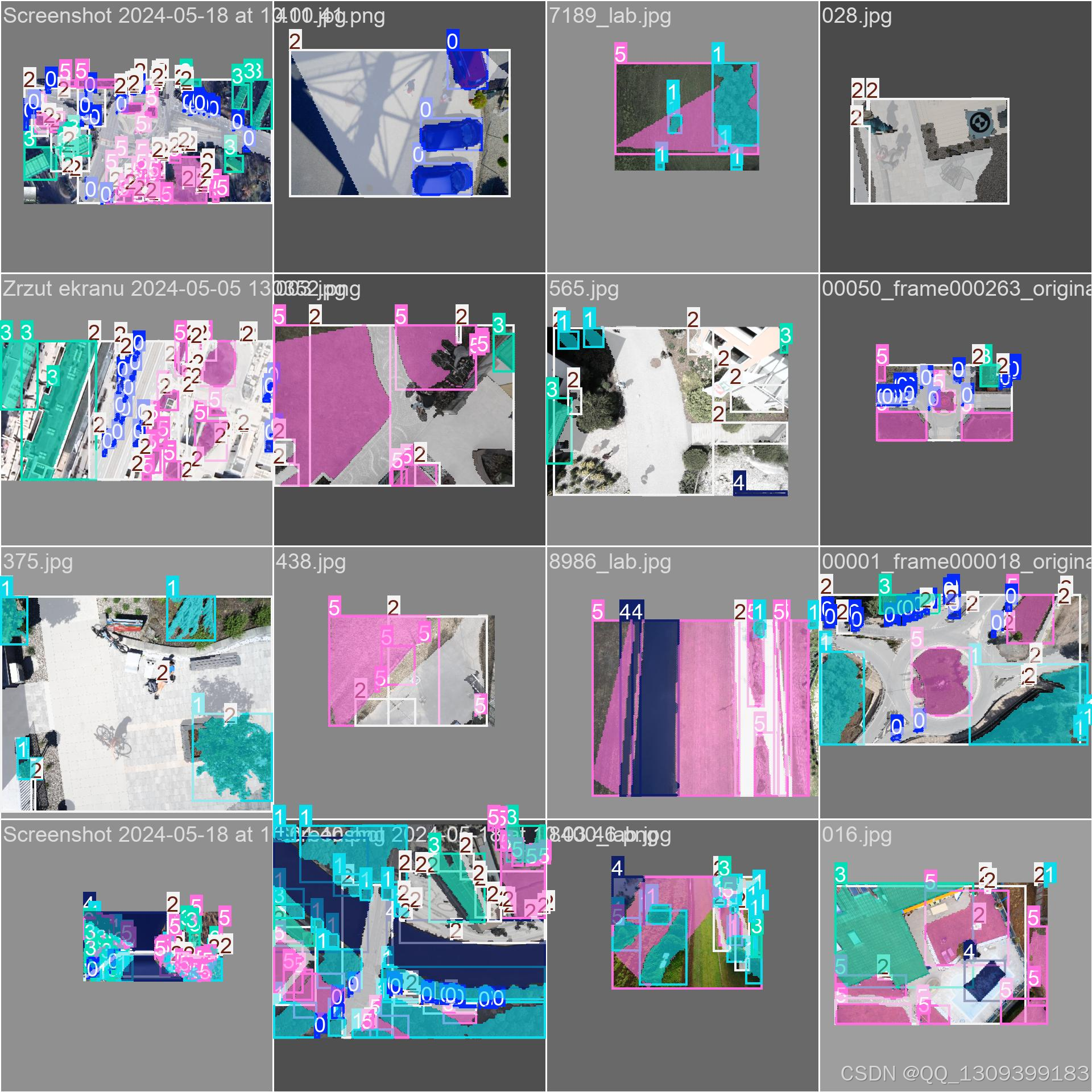
1. 数据准备与增强
- 标注规范:使用COCO格式,对建筑物轮廓、车辆中心点(点标注)和道路中线进行矢量化标注。
- 光谱增强:对多波段数据实施PCA降维、波段比值(如NDBI建筑指数)计算。
- 空间增强:应用旋转(-45°~45°)、随机裁剪和马赛克增强(4图拼接),模拟不同拍摄角度下的目标形态。
2. 模型训练优化
from ultralytics import YOLO
# 加载预训练模型
model = YOLO('yolov8x-seg.yaml').load('yolov8x-seg.pt')
# 修改输入通道(示例:4通道NIR-RGB)
model.model.args['channels'] = 4
# 自定义训练配置
results = model.train(
data='rsip.yaml', # 自定义数据集配置文件
epochs=300,
imgsz=1024,
batch=8,
optimizer='AdamW',
lr0=1e-4,
mixup=0.2, # 启用MixUp增强
loss_ota=1, # 开启OTA标签分配
mask_ratio=4, # 掩模下采样率
)
3. 后处理与结果优化
- 边缘细化:对分割结果使用条件随机场(CRF)或Guided Filtering,消除锯齿状边缘。
- 矢量后处理:通过Douglas-Peucker算法简化建筑物多边形,道路中线采用形态学骨架提取。
- 多模型融合:将YOLOv8分割结果与U-Net的语义分割输出融合,提升小目标召回率。
四、典型应用场景与性能指标
-
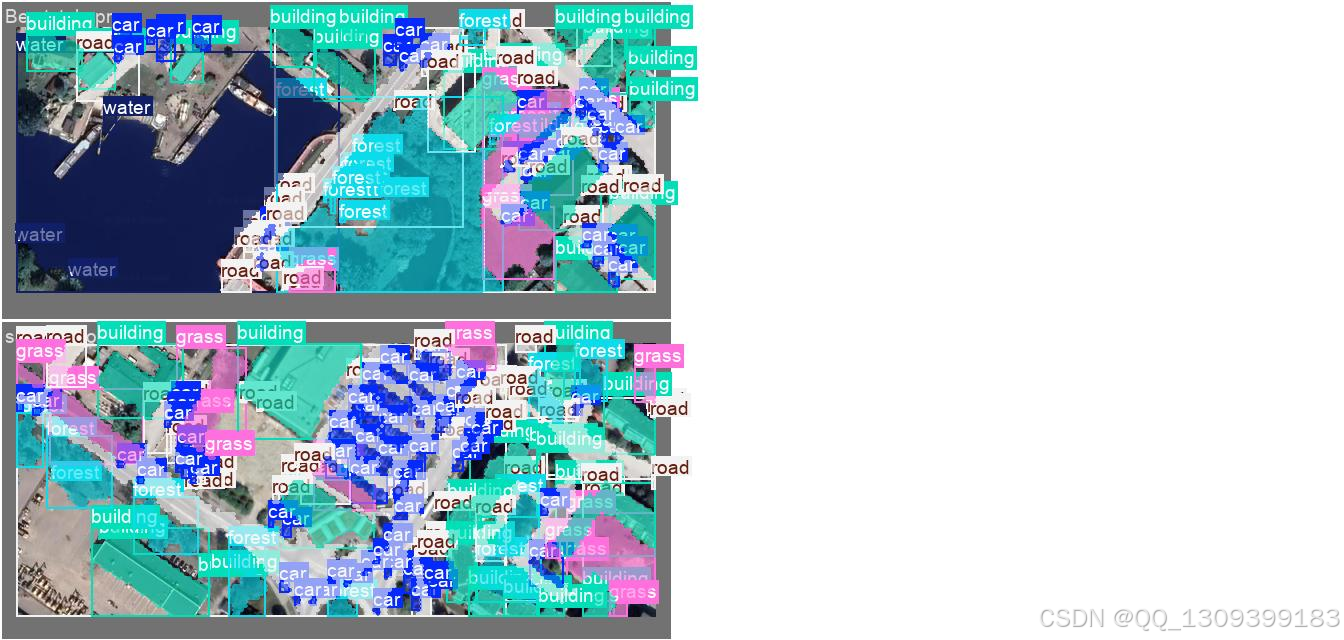
建筑物提取
- 挑战:不规则屋顶形状、阴影遮挡
- 方案:在SpaceNet数据集上,采用YOLOv8-L-seg模型,IoU达到84.7%,较Mask R-CNN提升6.2%。
- 应用:城市规划中的违章建筑监测、灾后损毁评估。
-
车辆检测与计数
- 挑战:密集停放车辆区分、树荫遮挡
- 方案:引入可变形卷积(DCNv2),在VEDAI数据集上AP50达91.4%,可识别最小20x20像素的车辆。
- 应用:停车场利用率分析、交通流量监控。
-
道路网络提取
- 挑战:乡村土路与农田边界混淆、隧道区域中断
- 方案:结合OpenStreetMap数据弱监督训练,在DeepGlobe数据集上IoU提升至78.9%。
- 应用:自动驾驶高精地图生成、偏远地区路网测绘。
五、未来发展方向
- 多模态数据融合
结合LiDAR点云高程数据,实现建筑物3D轮廓重建,解决高层建筑投影重叠