
德国TRINAMIC一家专注运动控制领域具有20多年经验的半导体创新公司,为直流无刷电机提供了从芯片到模块的整体解决方案。
传统的直流无刷电机控制方式如下:
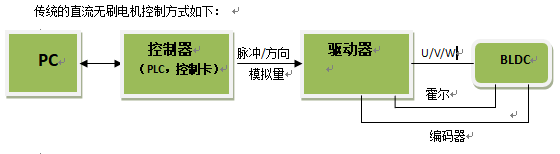
PC、控制器、驱动器、电机是分开的,PC和控制器通过通讯连接 发送通讯指令,控制器可以是PLC或者运动控制卡主要生成运动轨迹,将控制指令以脉冲/方向或者模拟量的形式输出给驱动器,驱动内部有功率转换和反馈信号处理最终输出PWM信号控制直流无刷电机,霍尔反馈到驱动器用于电机换向。在一些
要求精确定位的场合直流无刷电机会带有编码器,此时叫做直流无刷伺服。编码器反馈至驱动器参与闭环控制 ,部分的控制器也可以接受编码器的反馈。
这种模式的缺点是部件较多接线繁琐,后续维护困难,而且从控制器输出的控制信号有可能受外界强磁场干扰引起控制误差。
TRINAMIC的直流无刷产品采用嵌入式开发将控制器和驱动器的功能集成在一起,上面直接和PC通讯,下面直接和电机相连。
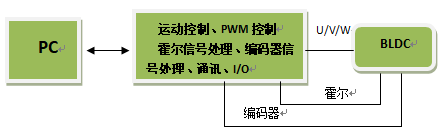
TRINAMIC提供的BLDC产品分为2类区别在于是否支持编码器反馈,也就是我们说的直流伺服
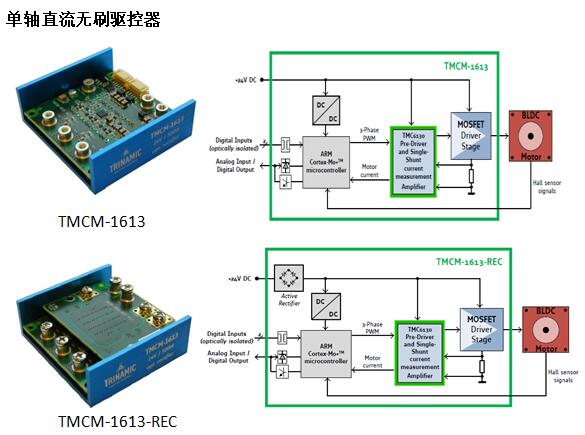
主要性能参数
型号 |
主要性能参数 |
|
| TMCM-1613 (-REC) |
电机类型 |
BLDC直流无刷/PMSM永磁同步 |
功率范围 |
7V-30V DC; -30V - 30V DC(REC) 额定电流30A;额定输出功率500W |
|
通讯接口 |
RS232 |
|
控制协议 |
TMCL |
|
控制功能 |
力矩控制、速度控制、位置控制 |
|
输入输出 |
左右限位和原点输入、2个数字量输入、0-10V模拟量输入、1个数字量输出、霍尔信号输入 |
|
斜坡发生器类型 |
梯形波加减速 |
|
直流伺服驱控模块

型号 |
主要性能参数 |
|
| TMCM-1630 TMCM-1633(CANopen) |
电机类型 |
BLDC直流无刷伺服/PMSM永磁同步伺服 |
功率范围 |
12V-48V DC;额定电流10A;额定输出功率150-300W |
|
通讯接口 |
RS232、RS485、USB、CAN |
|
控制协议 |
TMCL、CAN2.0b、CANopen(TMCM-1633) |
|
控制功能 |
FOC矢量控制、力矩控制、速度控制、位置控制 |
|
输入输出 |
左右限位和原点输入、2个数字量输入、2个0-10V模拟量输入、2个数字量输出、霍尔信号输入 |
|
编码器输入 |
支持增量数字编码器反馈,差分形式 |
|
斜坡发生器类型 |
梯形波/正弦加减速 |
|
操作软件 |
TMCL-IDE |
|
外形尺寸 |
50*92*10mm |
|

型号 |
主要性能参数 |
|
| TMCM-1640 |
电机类型 |
BLDC直流无刷伺服/PMSM永磁同步伺服 |
功率范围 |
15V-28.5V DC;额定电流5A;额定输出功率100W |
|
通讯接口 |
RS485、USB |
|
控制协议 |
TMCL |
|
控制功能 |
FOC矢量控制、力矩控制、速度控制、位置控制 |
|
输入输出 |
左右限位和原点输入、2个数字量输入、1个0-10V模拟量输入、1个数字量输出、霍尔信号输入 |
|
编码器输入 |
支持增量数字编码器反馈 |
|
斜坡发生器类型 |
梯形波/正弦加减速 |
|
操作软件 |
TMCL-IDE |
|
外形尺寸 |
42*42*8mm |
|

型号 |
主要性能参数 |
|
| PD-170-57 |
电机类型 |
BLDC直流无刷伺服/PMSM永磁同步伺服 |
功率范围 |
12V-48V DC;额定电流10A;额定输出功率500W |
|
通讯接口 |
RS232、RS485、USB、CAN |
|
控制协议 |
TMCL 、CAN |
|
控制功能 |
FOC矢量控制、力矩控制、速度控制、位置控制 |
|
输入输出 |
左右限位和原点输入、2个数字量输入、1个0-10V模拟量输入、1个数字量输出、霍尔信号输入 |
|
编码器输入 |
支持增量数字编码器反馈 |
|
斜坡发生器类型 |
梯形波/正弦加减速 |
|
操作软件 |
TMCL-IDE |
|
外形尺寸 |
直径61*高度16mm;电机长度有94mm和116mm两种 |
|
TRINAMIC最新产品选型手册下载链接地址:https://pan.baidu.com/s/1oO3Qo6834ABJ2r-djbA0vw
TMC中国 [email protected]