一个默默耕耘的工程师…
1.优点
无刷直流电机的优点:受命长,效率高,可以通大电流,也没有电磁干扰。
2.原理

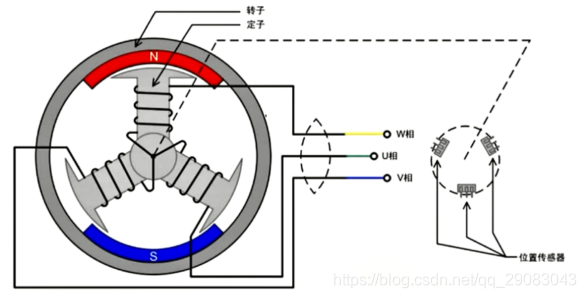
定子上面绕有线圈,并且将三根线向外引出(无刷直流电机一般都是三相的,相数越多,转子和定子之间就越平滑,但驱动器需要的电子器件就需要越多,系统复杂性和成本也就越高,而三相,在成本和平滑性上都满足我们的要求,所以市面上的绝大部分无刷直流电机都是三相的),转子是一个永磁体,定子的线圈产生磁场,该磁场会推动/吸引转子的磁场(类似于指南针原理),从而让转子转动。
怎么让定子上的线圈产生切合时机(切合时机的意思是,刚好和转子中的永磁体产生推动/吸引转子的磁场的效果,相斥就会推动转子转动)的磁场呢? 此时需要霍尔元件,用霍尔来感应转子的位置,MCU得到转子的位置后,再来决定定子的三根线需要如何导通。
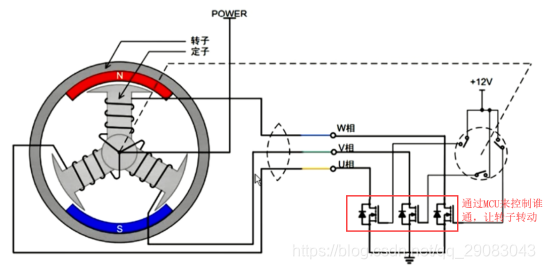
三根线如何导通?不是直接和MCU相连,而是,MCU和电机驱动器相连,电机驱动器上面有6个CMOS管,MCU主要通过霍尔采集的位置信息,来导通驱动器中的CMOS管,CMOS再控制电机转动。驱动器也称为三相桥式电路。通过桥式电路的裂变产生一个波形来控制电机的运转。
- 模型示意图
驱动器上直接使用三个来控制,脉动会比较大,所以一般是使用6个管子来控制。使用6个管子,也可以让电流反过来流(最大的好处)。即用6个MOS管组成三相桥。如下图所示,V1和V4组成一个桥臂,V1称为上桥臂,V4称为下桥臂。V3和V6组成一个桥臂,V5和V2也组成一个桥臂。
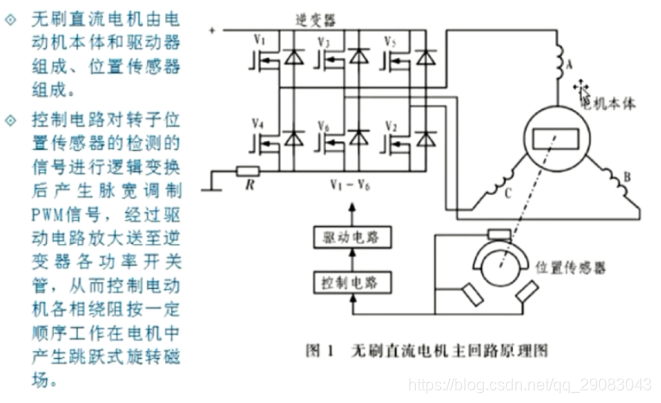
电子开关器件有很多,由于我们对电流和电压有很大的要求,即大功率,所以一般选用MOS管。
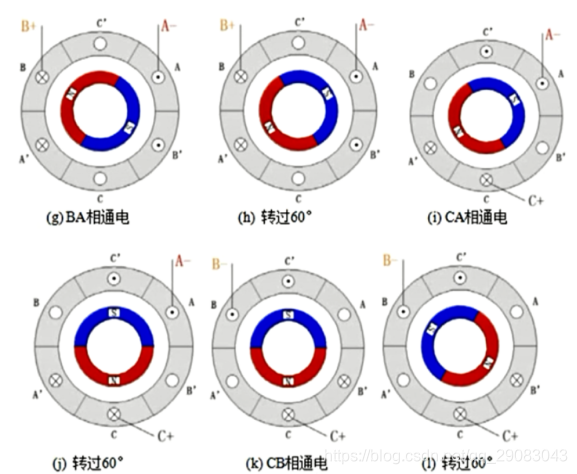
2.1.定子磁场方向

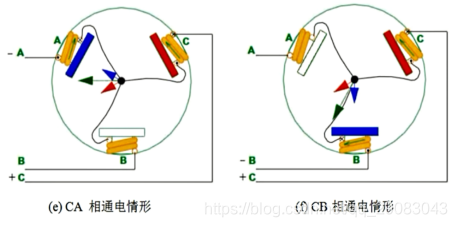
从上图可以看出,从a->b->c->d->e->f,定子的磁场方向刚好旋转一周,称为一个电周期,每次转60°。定子上面绕组的电一共切换了6次。也就是说,只要人为的让六个管子分别导通(每次只导通两个管子),就能控制转子的转动。怎么知道需要导通哪两个管子呢?就需要霍尔采集的转子的位置信息了。
定子旋转的磁场会拉着转 子一起旋转,即定子的旋转磁场的旋转和转子的旋转是一样的。
总结:
马达旋转一周,开关管切换了6次。
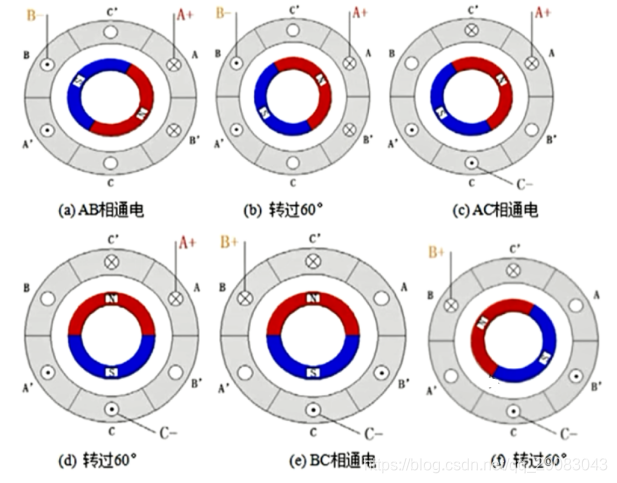
AB通电时,根据右手定则,磁力线的方向是从下到上的,即下面是N,上面是S,转子会发生旋转,注意,不是转子完全垂直时(转子的N和定子的N重合,S和S重合)才导通AC,而是转过60°就立马导通AC,这称为提前换向,可以使定子对转子的力最大。
霍尔一般是安装在两绕组之间,在上图的环的线位置就是霍尔的安装位置。一般是有几相,就用几个霍尔,三相就需要三个霍尔。
2.2.霍尔的安装位置
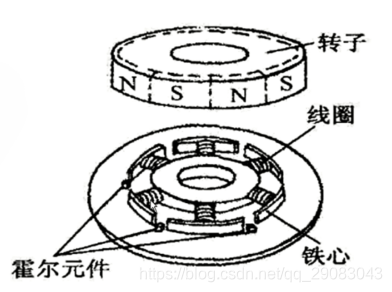
霍尔元件的安装一般有两种方式,120°(霍尔与霍尔之间,间隔了120°)和60(霍尔与霍尔之间间隔了60°)°。如上图所示,是以60°方式安装。
要注意,定子中的线圈绕组是三对,也就是三相,但每一个可以设计成多个齿,譬如一项有3个齿,三相一共就有9个齿。齿数必须是3个倍数,如果是不是3的倍数,譬如一共有13个齿,安装霍尔时,就不对称,不对称会导致电机震荡,噪音也会比较大。
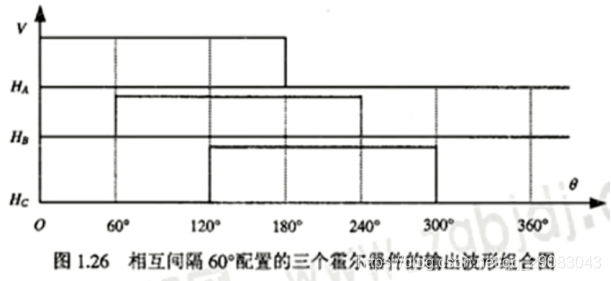
2.3.60°安装状态
一个霍尔有两种状态,霍尔对准N,输出高,对准S,输出低(霍尔的输出只有0或1)。3个霍尔,一共有8种状态,但我们只使用了其中的6种状态,如果下图所示。

2.4.120°安装状态
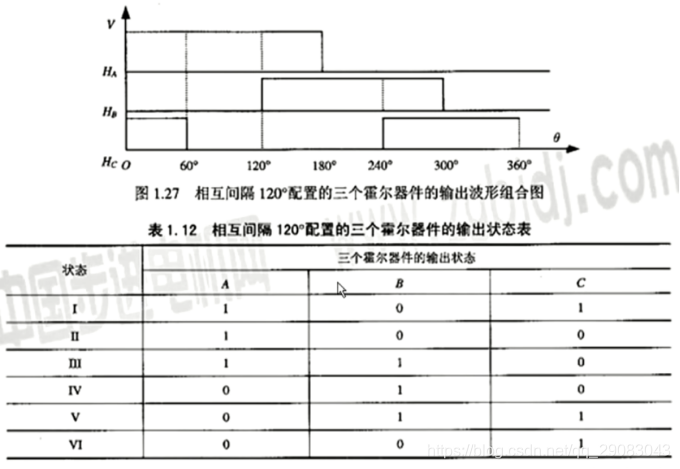
因为一个电周期有6个状态,定子有3相线圈绕组,并且3个绕组有一个端是连在一起的,另外一端直接引出,有点像一颗星星,这种无刷马达的控制控制方式称为两辆导通星形三项六状态。
BLDC/三相直流无刷马达的控制方式:两两导通星形三相六状态。
- 两两导通:指每一时刻,都有两相导通,另一相空闲。
- 星形:指定子绕组的连接方式。
- 三相:指定子有三个绕组。
- 六状态:指一个电周期为6个状态。
2.5.霍尔元件数目的确定
有多少相,就需要多少个霍尔元件,一般的BLDE都是三相的,所以需要三个霍尔元件。
2.6.霍尔元件相隔的位角度
有两者位角度,一种是60°,两一种是120°。
具体使用哪一种,取决于定子的磁极对数和齿槽个数。大部分都是120°安装,某些特殊的使用60°安装。 可以装在齿的中间或是槽的中间。拿到一个BLDE电机时,需要确定霍尔的安装位置,一般马达厂会告知。
3.BLDC的参数
(1)输入功率和输出功率:输出功率是直接给负载使用的;输入功率也就是PCB板的输出功率。
(2)PCB输出的电压:电机驱动器输出的等效电压。
(3)PCB输出的电流:同上。
(4)转速:航模中使用的是高转速电机,但需要扭矩比较小,电动自行车使用的是低转速电机,但扭矩需要比较大。马达的功率与电机的转速和扭矩有关系,功率P = 扭矩 * 转速 * 系数。BLDE有扭矩型的,也有转速型的,高转速的马达,扭矩一般比较小,低转速的马达,扭矩一般比较大。
(5)转矩:在功率不变的情况下,转速越高,转矩/扭矩越大;转速越低,转矩/扭矩越大。
4.驱动器
BLDC驱动器分为方波控制驱动器(电动车上大部分使用这种)和正弦波控制驱动器(汽车上大部分使用这种)。
(1)方波控制方式相对比较简单,正弦波方式比较复杂。
(2)对于位置要求不是很严格,可以使用方波,如果对位置要求比较严格,就必须使用正弦波。
(3)方波控制器比较简单,控制算法也不会特别难。
所以市面上大部分都是使用方波控制器,对于一些高要求的,对位置要求非常精确的才使用正弦波。这里的方波和正弦波指的是马达的反电动势的波形。
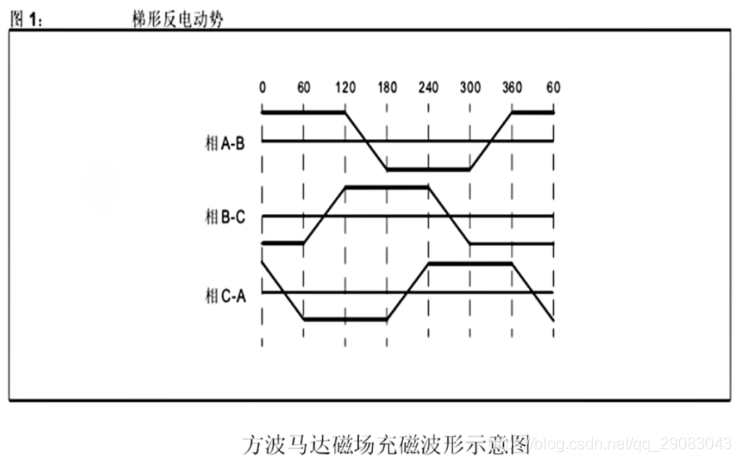
这里所说的方波,严格意义上来说是一个梯形波。
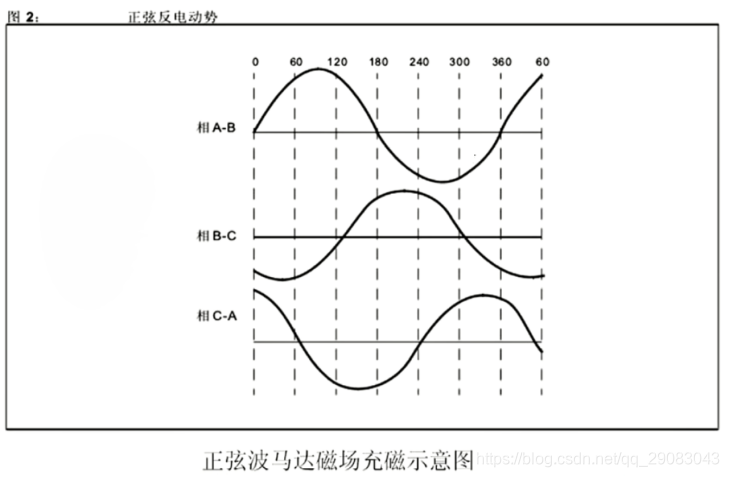
反电动势为方波的又称为方波马达,反电动势为正弦波的称为正弦波马达。
马达的反电动势是怎么产生的?
定子中的线圈绕组通电,产生磁场,旋转的磁场会拉着转子运动。转子是一个永磁体,也有磁力线,转子转动的过程同时也在对定子的线圈绕组做磁力线的切割,从而会在定子的线圈绕组上产生一个电势(磁力线切割线圈,会在线圈上产生电流,线圈自身有电阻,就类似于在线圈两端产生一个电压,即电势),这个电势就称为反电动势,这和自感是完全不同的概念。
5.方波控制驱动器
方波控制驱动器分为有位置传感器控制和无位置传感器控制。
- 有位置:通过霍尔元件来获得当前转子的位置,从而确定需要导通哪两个管子。
- 无位置:需要通过反电动势进行预估来确定当前转子的位置,从而确定需要导通哪两个管子。
对于风机或是空调的压缩机而言,由于需要比较高的转速,这种情况一般使用无位置传感器的控制方式。而对于电动自行车或电动汽车,由于他们是低转速的,需要的扭矩也比较大,一般使用有位置传感器的控制方式,如果使用无位置床传感器的控制方式,会出现启动不可靠的问题。
即有位置传感器适用于低转速高扭矩的场合,无位置传感器适用于高转速低扭矩的场合。
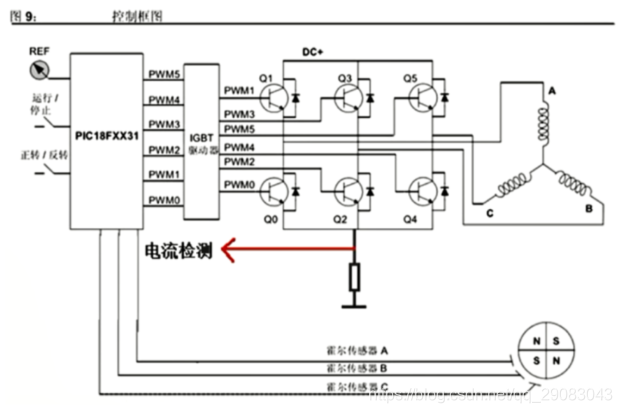
6.三相直流无刷马达-有位置的驱动方式
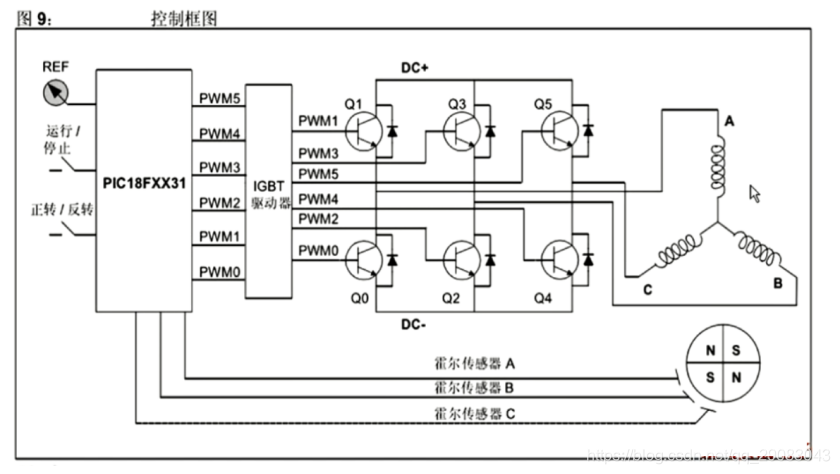
MCU控制霍尔元件采集当前转子的位置,从而决定需要导通哪两个管子。IGBT的作用:因为MOS管的导通电压最少需要5V,而单片机的引脚一般只能输出3.3V,不足以导通MOS管,所以需要一个电平转换电路,IGBT就是起电平转换的。 一般使用15V电压来驱动MOS管的门基。即左边输出的3.3V的PWM波形,右边的就是15V的PWM波形。
- 霍尔60°安装导通相序图:


注意:
Q1和Q0是一组桥臂,同一时刻,Q1和Q0只能有一个导通,如果都导通,就直接将电机短路了。Q3和Q2同理,Q5和Q4同理。也就是说,同一时刻,所有上桥臂只能有一个导通,所有下桥臂只能有一个导通。
这里的PWM的作用:对电机进行调速。不同的占空比输出的电压不同,从而达到调速的效果。 如果不用PWM,而是直接导通MOS管,此时电机是工作在全速状态下的;也可以直接改变DC+处的电压,从而达到调速的效果,但由于直流电压一般是稳定的,不好调节,除非做一个可以调压的开关电源,但成本非常高,所以一般都是直接改变门级电压来达到调试效果。在每一个状态里面加一个PWM波。要注意,序号1使用PWM波导通时,其他序号的管子是关断的,可以不用通PWM,所以只需要研究六状态里面的其中一种状态,在该状态下加PWM波的情况即可,不用研究所有的状态。
转子的旋转和定子磁场的旋转是同步的。
序号1导通之后,如果直接导通序号2,会导致电机失步。序号6之后,就进入了下一个周期,即接下来导通序号1。
7.驱动器电路设计
整个驱动器电路分为以下几个部分:
(1)桥式电路(也称为裂变电路)。
(2)霍尔的采样电路。
(3)预驱动电路:桥式电路前面的电路,即IGBT电路,主要用于电平转换。
(4)MCU部分。
(5)电路检测电路。