现代电机与控制技术以电流驱动模式的不同将永磁无刷直流电动机分为两大类:1)方波驱动电机,也即无刷直流电机(BLDC);2)正弦波驱动电机:也即永磁同步电机(PMSM)。
表面来看,BLDC和PMSM的基本结构是相同的:1)它们的电动机都是永磁电动机,转子由永磁体组成基本结构,定子安放有多相交流绕组;2)都是由永久磁铁转子和定子的交流电流相互作用产生电机的转矩;3)在绕组中的定子电流必须与转子位置反馈同步;4)转子位置反馈信号可以来自转子位置传感器,或者像在一些无传感器控制方式那样通过检侧电机相绕组的反电动势等方法得到。
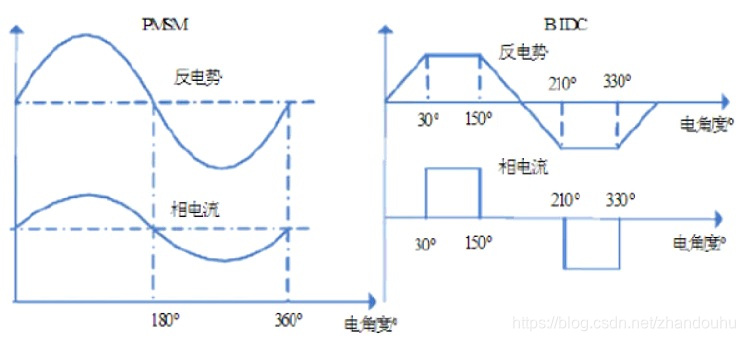
虽然在永磁同步电动机和无刷直流电动机的基本架构相同,但它们因驱动方式不同,是的其在设计和控制细节上存在明显的区别。1)反电势不同, PMSM具有正弦波反电势,而BLDC具有梯形波反电势;2)定子绕组分布不同, PMSM采用短距分布绕组,有时也采用分数槽或正弦绕组,以进一步减小纹波转矩;而BLDC采用整距集中绕组。3)运行电流不同,为产生恒定电磁转矩,PMSM为正弦波定子电流; BLDC为矩形波电流。4)永磁体形状不同, PMSM永磁体形状呈抛物线形,在气隙中产生的磁密尽量呈正弦波分布;BLDC永磁体形状呈瓦片形,在气隙中产生的磁密呈梯形波分布。5)运行方式不同, PMSM采用三相同时工作,每相电流相差120°电角度,要求有位置传感器。BLDC采用绕组两两导通,每相导通120°电角度,每60°电角度换相,只需要换相点位置检测。正是这些不同之处,使得在对PMSM和BLDCM的控制方法、控制策略和控制电路上有很大差别。
因设计上和控制上存在区别,导致PMSM和BLDC特性也不同,性能对比如下:
1、转矩波动
转矩脉动是机电伺服系统的最大问题, 它直接影响精确的位置控制和高性能的速度控制很困难。在高速情况下, 转子惯量可以过滤掉转矩波动。但在低速和直接驱动应用场合, 转矩波动将严重影响系统性能, 将使系统的精度和重复性恶化。而空间精密机电伺服系统绝大多数工作在低速场合,因此电机转矩脉动问题是影响系统性能的关键因素之一。PMSM和BLDCM都存在转矩脉动问题。转矩脉动主要有以下几个原因造成:齿槽效应和磁通畸变、电流换相引起的转矩及机械加工制造引起的转矩。
2、功率密度
在机器人和空间作动器等高性能指标应用场合, 对于给定的输出功率, 要求电机重量越小越好。功率密度受电机散热能力即电机定子表面积的限制。对于永磁电机, 绝大多数的功率损耗产生在定子, 包括铜耗、涡流损耗和磁滞损耗, 而转子损耗经常被忽略。所以对于一个给定的结构尺寸,电机损耗越小,允许的功率密度就越高。参考《永磁无刷直流电机技术》,知在相同的尺寸下, BDLC与PMSM相比,可以多提供15%的功率输出。如果铁耗也相同,BDLC的功率密度比PMSM可提高15%。
3、转矩惯量比
转矩惯量比指的是电机本身所能提供的最大加速度。因为BDLC可以比PMSM多提供15%的输出功率, 所以它可获得被PMSM多15%的电磁转矩。如果BDLC和PMSM具有相同速度,它们的转子转动惯量也相同,那么BDLC的转矩惯量比要比PMSM大15%。
4、传感器方面
(1)转子位置检测:BLDC中每一时刻只有两相绕组导通, 每相导通120°电角度, 只要正确检测出这些换相点, 就能保证电机正常运行, 通常使用3个霍尔传感器。在PMSM中,需要正弦波电流,电机工作时所有三相绕组同时导通, 需要连续的位置传感器, 最常见的是精度很高的编码器。
(2)电流检测:对于三相电动机而言,为了控制绕组电流,需要得到三相电流信息。通常采用两个电流传感器,因为三相电流之和为0。对于一些简易型无刷直流电机控制系统钟,可只采用一个电流传感器来检测母线的电流来降低成本。