说明:
该笔记仅仅针对笔者本人知识上的漏洞,内容包括但并不完全包括该书上的重要知识点以及不理解之处,笔记内容会不定期更新,参考教材为机械工业出版社出版的《永磁无刷直流电机技术》,作者:谭建成,2018年1月第1版。
由于本人任职电机驱动控制领域的软件工程师仅有两年时间,平时做的更多的是电机控制及外设功能逻辑上面软件的编写及调试,电机方面的基础知识较为薄弱,因此决定通过这种方式记录遇到的重要知识点或问题,如果各位读者在阅读的时候遇到错误之处,还劳烦提出,我们共同讨论,一起进步,感谢。
章节目录
一 绪论
- 普通的直流电动机中,直流电的电能是通过电刷和换向器进入电枢绕组,与定子磁场相互作用产生转矩。因此产生了一系列缺陷:
(1) 机械换向产生的换向火花引起换向器和电刷磨损、电磁干扰、噪声大,寿命短。
(2) 结构复杂,可靠性差,故障多,需要经常维护。
(3) 由于换向器的存在,限制了转子转动惯量的进一步下降,影响了动态性能。 - 普通直流电动机的电枢绕组在转子上,永磁体则在定子上。无刷直流电动机可以看成是一个定转子倒置的直流电动机。
- 与普通的有刷直流电动机和感应电动机比较,无刷直流电动机的关键技术特性是:
(1) 经过电子控制换相获得类似直流电动机的运行特性,有较好的可控性、宽调速范围。
(2) 需要转子位置反馈信息和电子多相逆变驱动器。
(3) 本质上是交流电动机,由于没有电刷和换向器的火花,磨损问题,可工作于高速,可得到较高的可靠性,工作寿命长,无需经常维护。
(4) ***采用永磁产生气隙磁场,功率因数高,转子的损耗和发热低,有较高的效率;***有资料对比,7.5KW异步电动机效率为86.4%,同容量的无刷直流电动机效率可达92.4%。(思考采用永磁产生的气隙磁场为什么效率会相对较高)
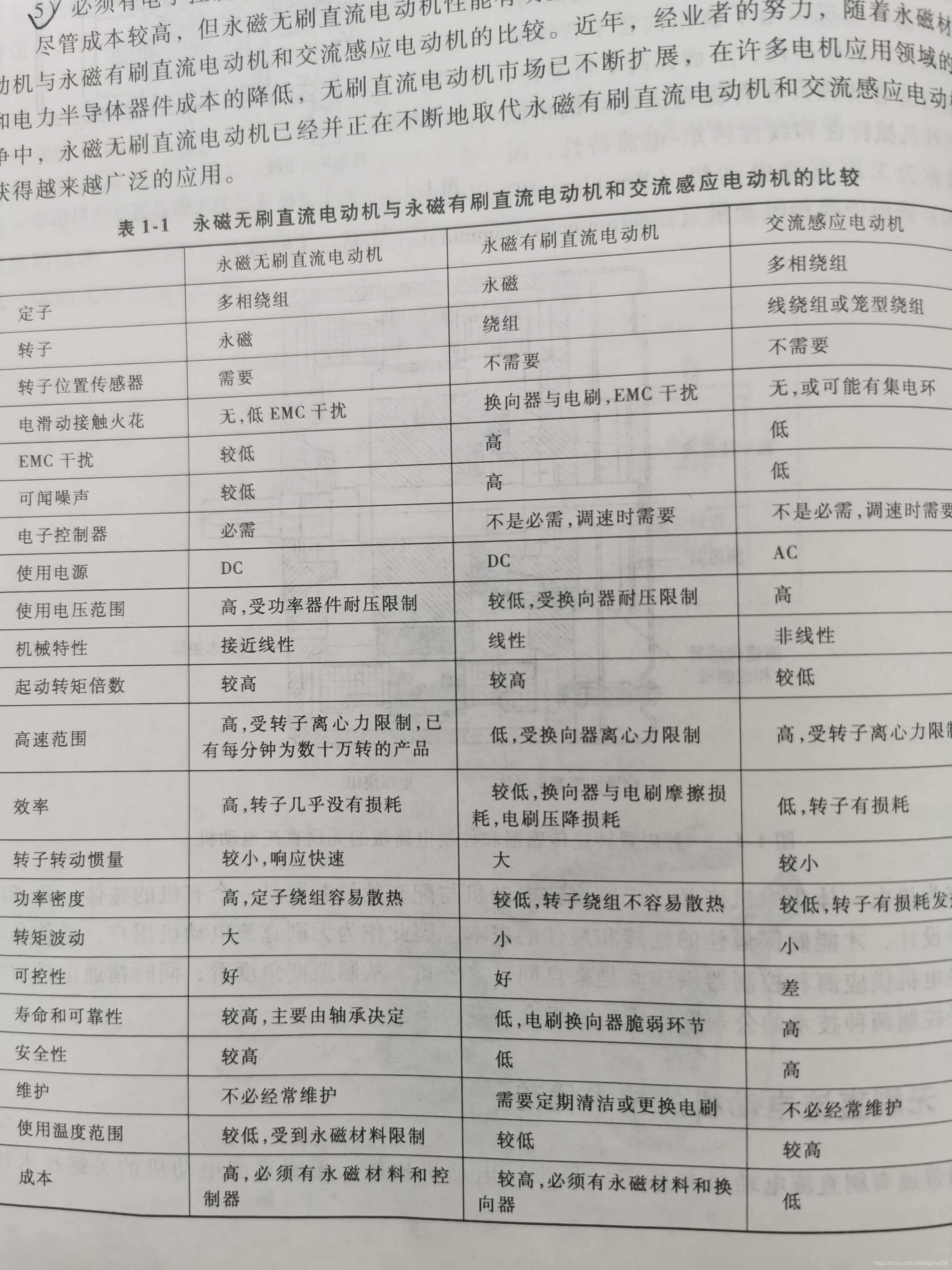
(5) 必须有电子控制部分,所以总成本比有刷直流电动机高。 - 见图片
- 无刷直流电动机的不足之处:
(1)需要电子控制器才能工作,增加了技术复杂性和制作成本。
(2)需要位置传感器,增加了结构复杂性和成本,降低了可靠性。
(3)转子永磁材料限制了电机使用环境温度,不适用于高温场合。
(4)有明显的转矩波动,限制了电机在高性能伺服系、低速度纹波系统中的应用(思考为什么会有明显的转矩脉动)。 - 永磁无刷直流电机的应用场合:
(1)计算机外围设备,办公自动化设备,数码电子消费品中的应用。
(2)工业驱动,机器人,数控,伺服控制。
(3)汽车产业。
(4)医疗设备。
(5)家用电器。 - 在电机设计方面,过去无刷直流电动机大多数采用整数槽设计。近年分数槽技术的应用日益增多。无刷直流电动机采用分数槽技术好处如下:
(1)对于多极的无刷直流电动机可以采用较少的定子槽数,有利于槽满率的提高,进而提高电动机性能;同时较少数目的元件数可以简化嵌线工艺和接线,有助于降低成本。
(2)增加绕组的短(长)距和分布效应,改善反电动势的正弦性。
(3)有可能得到线圈节距y=1的设计(集中绕组),每个线圈只绕在一个齿上,减少用铜量。
(4)可以使用专用的绕线机,提高效率。
(5)使电动机绕组电阻减小,降低铜损,降低温升,提高电动机效率。
(6)降低齿槽反应转矩,有利于减小振动和噪声。 - 部分场合无法使用传感器,例如空调压缩机的高温高压环境,因此促使无位置传感器技术的发展,例如反电动势法,它检测不励磁相绕组的反电动势过零点,经过运算,决定换相时刻,这也是硬件软件化的成功例子。
二 方波驱动与正弦波驱动的原理比较
- BLDC和PMSM的基本结构是相同的,都是由永久磁铁转子和定子交流电流相互作用产生电机的转矩。
- 这两种电机的主要区别在于控制器电流驱动方式不同,无刷直流电机是方波(梯形波)电流驱动,PMSM是一种正弦波电流驱动,使得永磁同步电机在电气和机械方面都更加安静,而且几乎没有转矩脉动。
- 两者在电动机的气隙磁场波形、反电动势波形、驱动电流波形、转子位置传感器,以及驱动器中的电流环电路结构、速度反馈信息的获得和控制算法等方面都有明显的区别,它们的转矩产生原理也有很大的不同。
- 在理想情况下,无刷直流电机设计气隙磁通密度分布使得每相绕组的反电动势波形为有平坦顶部的梯形波,其平顶宽度应该尽可能的接近120°。在转子位置传感器作用下,使该相电流导通120°范围和同相绕组反电动势波形平坦部分120°范围在相位上是完全重合的,如图所示。

- BLDC在120°范围内,该相电流产生的电磁功率和电磁转矩均为恒定值,由于每相绕组正向导通和反向导通的对称性,以及三相绕组的对称性,总合成电磁转矩为恒定值,与转角位置无关。
- 在一相绕组正向导通120°的范围内,输入相电流I为恒定值,它的一相绕组反电动势E为恒定值,转子角速度为ω,一相绕组产生的电磁转矩为
,由下式表示:
考虑在一个电气周期内,该相还反向导通120°,以及三相电磁转矩的叠加,则在一个360°内的总电磁转矩 为
(2020.8.4更新)