该系列为DR_CAN自动控制原理视频笔记,详见https://space.bilibili.com/230105574
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
该篇主要讲根对系统表现的影响,主要还是过去的一些内容
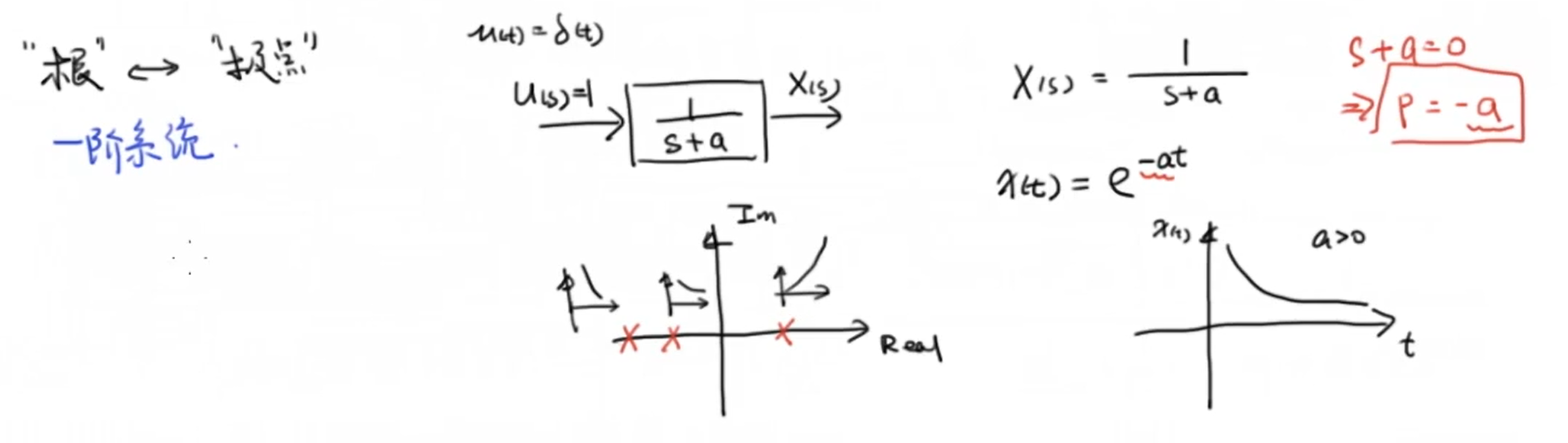
1 一阶系统
2 二阶系统
二阶系统之前以及有详细介绍了这里不再赘述:
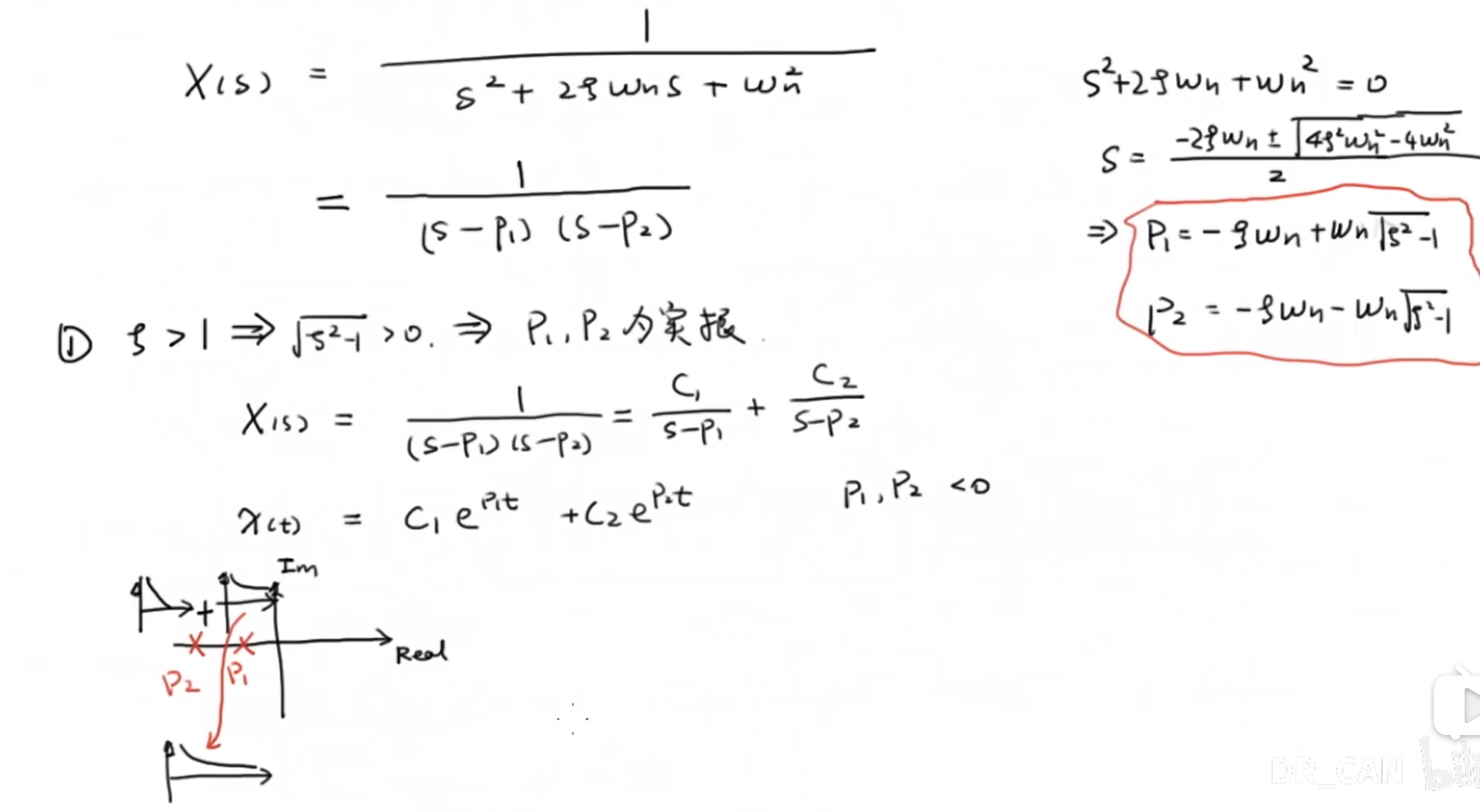
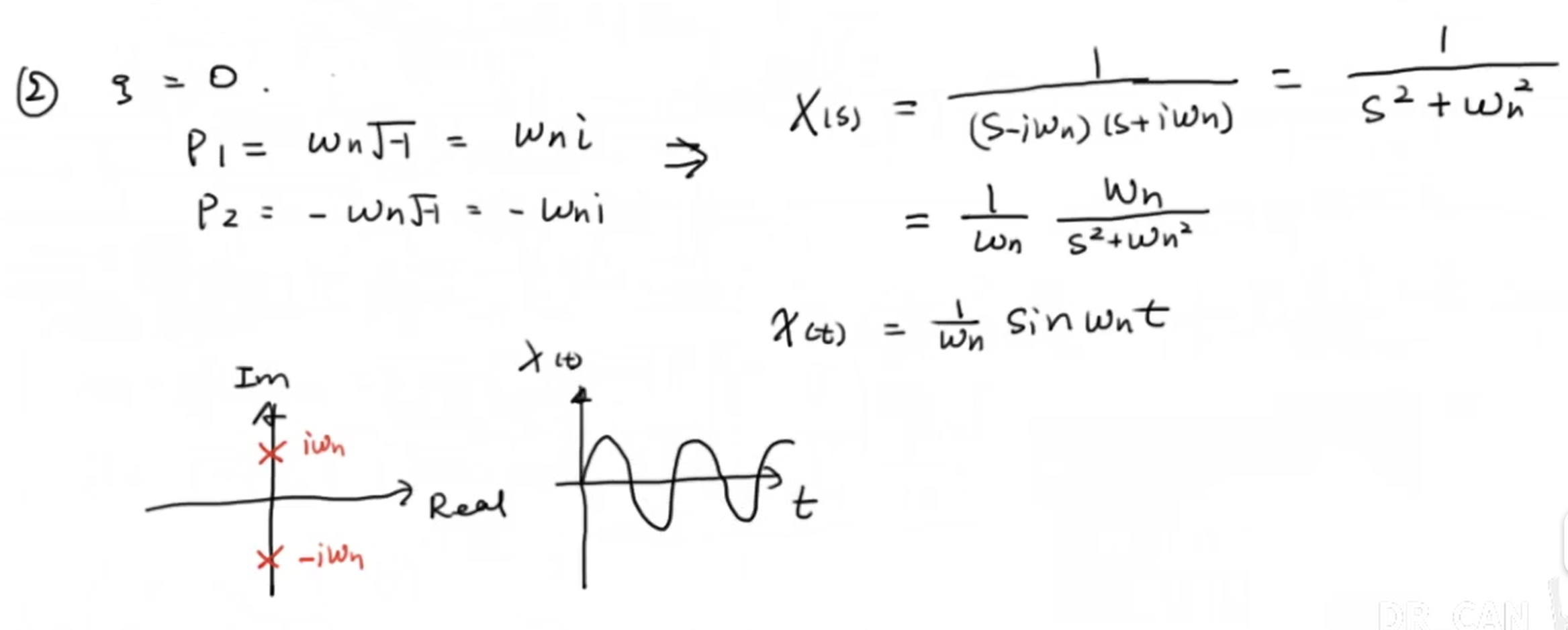
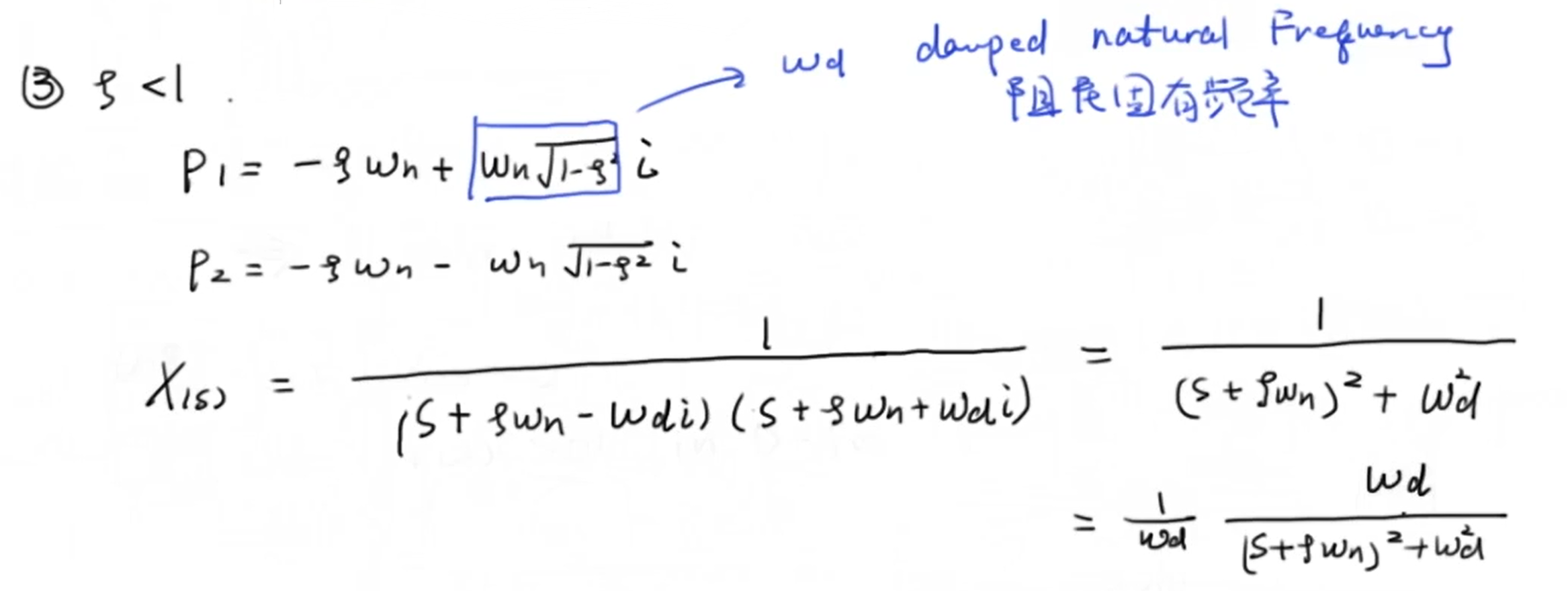
我们可以绘制出欠阻尼情况下系统极点的情况,并计算出系统输出的时域表示,可以看到极点位置的坐标为(\(-\zeta\omega_n\) , \(\pm\omega_n\sqrt{1-\zeta^2}\)),而极点到原点的距离 \(d_3=\omega_n\) :
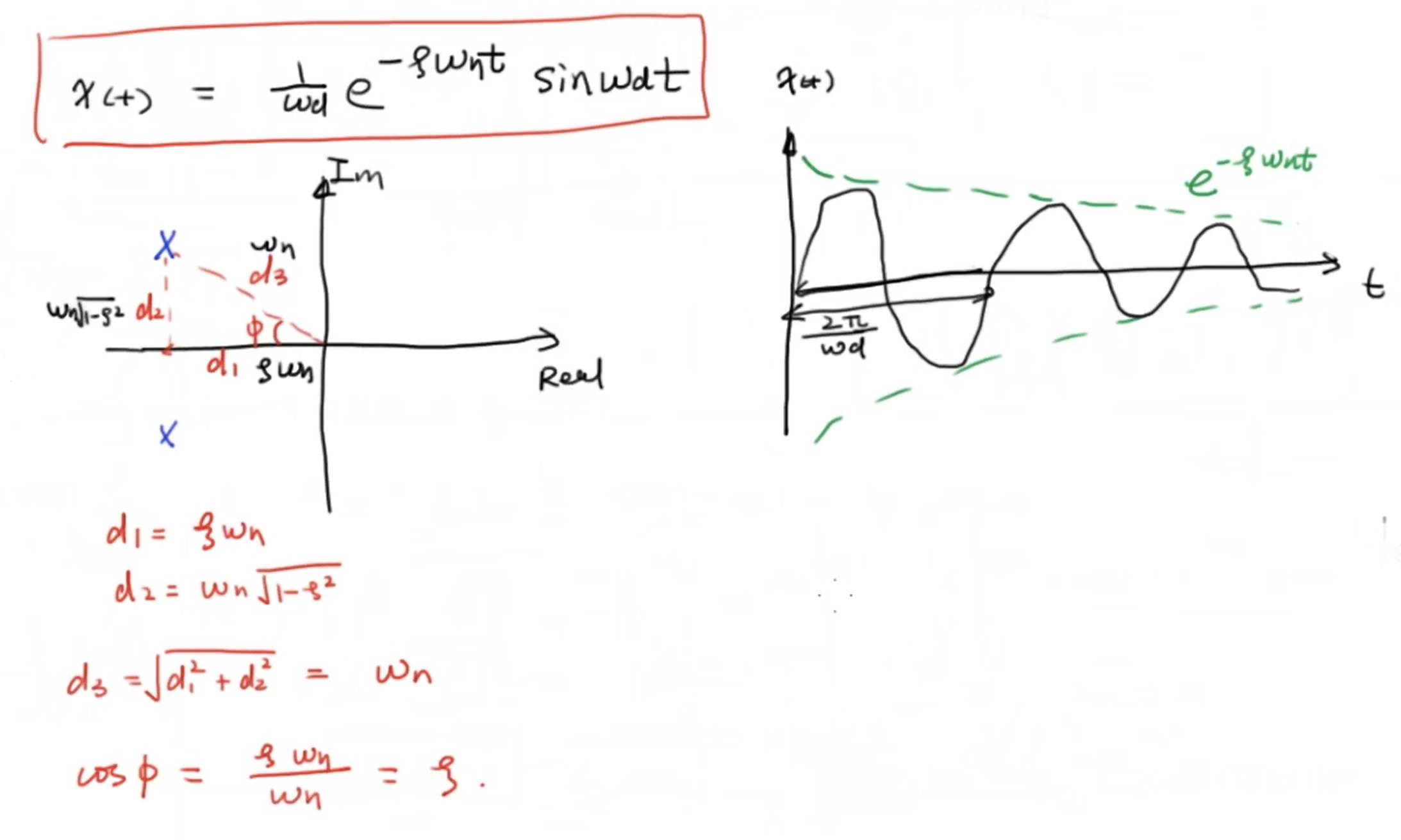
值得注意的是,二阶系统的各项性能指标包括超调量、上升时间、调节时间等等均与系统根的位置息息相关。
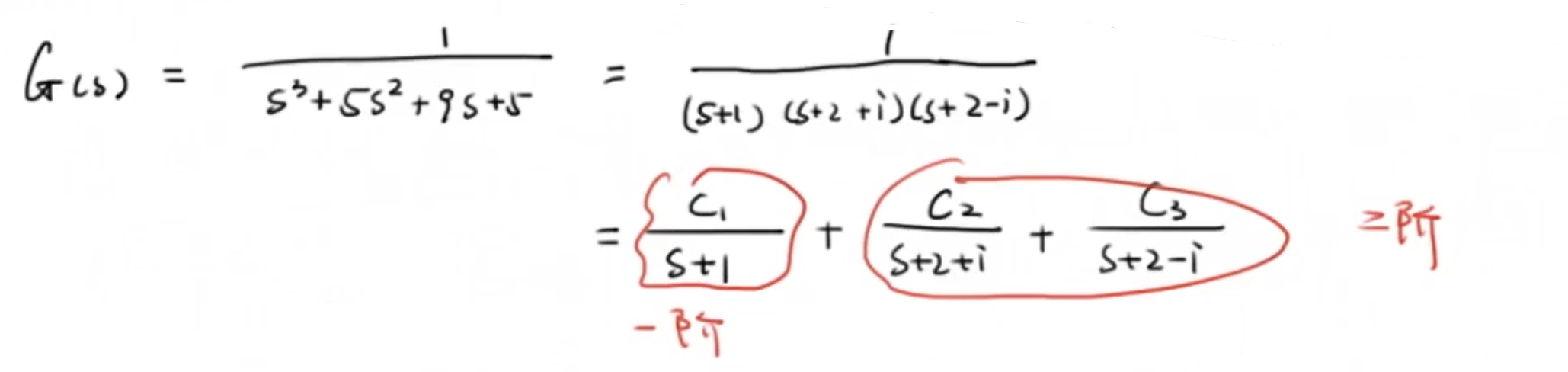
3 更高阶的系统
更高阶的系统我们可以将其拆成一阶或二阶系统分别分析: