总目录:
第一章自动控制的一般概念+第二章控制系统的数学模型学习笔记:
https://blog.csdn.net/mahoon411/article/details/112555468
第三章线性系统的时域分析与校正学习笔记:
https://blog.csdn.net/mahoon411/article/details/112757589
第四章根轨迹法学习笔记:
https://blog.csdn.net/mahoon411/article/details/113093760
第五章线性系统的频域分析与校正学习笔记:
第六章线性离散系统的分析与校正学习笔记:
第七章非线性控制系统分析学习笔记:
第八章控制系统的状态空间分析与综合学习笔记:
1. 根轨迹法的基本概念
根轨迹法也称为复域法,具有如下特点:
- 图解法,直观,形象。
- 适合于研究当系统中某一参数变化时,系统性能的变化趋势。
- 是一种近似的方法,不十分精确。
1.1 根轨迹的基本概念
根轨迹是当系统的开环传递函数中的某一参数(如根轨迹增益K*)从零变化到无穷大时,系统的闭环传递函数中的特征根(闭环极点)在s平面上移动的轨迹。其中,根轨迹增益K*是系统的开环传递函数的首1形式对应的系数。
由上述概念可以看出,根轨迹是系统闭环极点的轨迹(没有开环根轨迹一说),但它是随着系统开环传递函数的首1形式的根轨迹增益K*变化而变化的。
在此回忆一下根轨迹增益K*与开环增益的区别:把开环传递函数化为尾1标准型,得到的常数项K称为开环增益。把开环传递函数化为首1标准型,K*称为根轨迹增益。
顺便总结一下目前接触到的所有增益。
| 开环传递函数 | 闭环传递函数 | |
|---|---|---|
| 首1标准型 | 根轨迹增益K* | / |
| 尾1标准型 | 开环增益K | 闭环增益K |
1.2 根轨迹与系统性能
根轨迹与系统性能之间有着密切的联系,利用根轨迹可以分析当系统参数(例如开环增益K或根轨迹增益K*)增大时系统性能(稳、准、快)的变化趋势。
1.3 闭环零、极点与开环零、极点之间的关系
系统结构图如下所示。
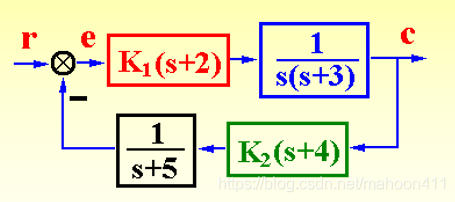
系统的开环传递函数为:
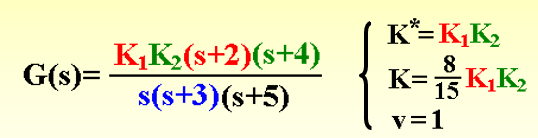
系统的闭环传递函数为:

对比观察,可得出结论:
- 闭环零点由前向通路传递函数G(s)的零点和反馈通路传递函数H(s)的极点组成。
闭环零点不随根轨迹增益K*变化,因此不必专门讨论闭环零点。 - 闭环极点与开环零点、开环极点以及根轨迹增益K*均有关。
闭环极点随根轨迹增益K*而变化,所以研究闭环极点随根轨迹增益的变化规律是必要的。
由此可以总结出根轨迹法的任务:
- 由已知的开环零、极点的分布以及根轨迹增益K*,通过图解法找出闭环极点(绘制出闭环极点的根轨迹)。一旦闭环极点确定后,再补上闭环零点,系统性能(稳、准、快)便可以确定。
1.4 根轨迹方程
一个闭环系统的结构图如下图所示。
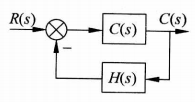
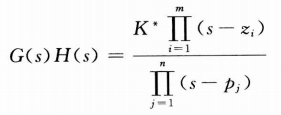
系统的开环传递函数为:
系统的闭环传递函数为:
系统的闭环特征方程为:

整理一下,得到根轨迹方程:
显然,在s平面上凡是满足上式的点,都是根轨迹上的点。
上面的根轨迹方程从类型上来说属于复数方程。
相当于是求解让两个复数相等的解。如果两个复数具有相同的幅值和相同的相角,那么这两个复数是相等的。通过幅值条件和相角条件来求解复数相等的方程会更加简便。下面给出上式的幅值条件和相角条件表达式:
幅值条件:等式两边同时取模值。等号左边遵从积的模值等于模值的积。等号右边中,-1的模值等于1。
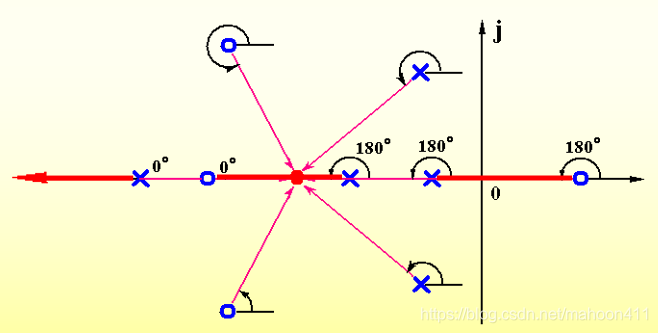
相角条件:等式两边同时取相角。等号左边遵从复数相乘对应相角相加,复数相除对应相角相减。等号右边,-1在复平面中位于实轴左边,因此相角为(2k+1)π (k=0,±1,±2…)。

由上述两个条件可以看出:
- 幅值条件与根轨迹增益K*有关,而相角条件与根轨迹增益无关。
- 对s平面上任意的点,总存在一个K*,使其满足模值条件,但该点不一定是根轨迹上的点(因为不一定满足相角条件)。
- s平面上的某个点,只要满足相角条件,则该点必在根轨迹上(因为s平面上的点必定满足模值条件)。
- 相角条件是确定s平面上一点是否在根轨迹上的充分必要条件。
- 根轨迹上某点对应的根轨迹增益K*值,应由模值条件来确定。
2. 绘制根轨迹的基本法则
2.1 法则一:根轨迹的起点和终点
根轨迹的起点指根轨迹增益K*=0;根轨迹的终点指K*→∞:。
根轨迹起始于开环极点,终止于开环零点;如果开环极点个数n大于开环零点个数m ,则有 n-m 条根轨迹终止于无穷远处。
2.2 法则二:根轨迹的分支数,对称性和连续性
根轨迹的分支数与开环零点数m、开环极点数n中的大者相等。
根轨迹是开环系统某一参数从零变到无穷时,闭环极点在s平面上的变化轨迹。因此,根轨迹的分支数必与闭环特征方程根的数目一致,即根轨迹分支数等于系统的阶数。实际系统都存在惯性,反映在传递函数上必有n≥m。所以一般讲,根轨迹分支数就等于开环极点数。
根轨迹连续且对称于实轴。
2.3 法则三:实轴上的根轨迹
实轴上的某一区域,若其右边开环实数零、极点个数之和为奇数,则该区域必是根轨迹。
2.4 法则四:根之和
当系统开环传递函数G(s)H(s)的分子、分母阶次差(n-m)大于等于2时,系统闭环极点之和等于系统开环极点之和,等于一个常数。
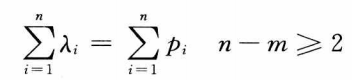
上式中,λ1,λ2,…,λn为系统的闭环极点(特征根),p1,p2,…,pn为系统的开环极点。
即n-m ≥ 2时,一部分根左移,另一部分根必右移,且移动总量为零。
2.5 法则五:根轨迹的渐近线
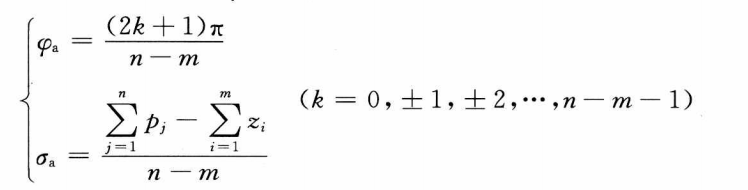
当系统开环极点数n大于开环零点数m时,有n-m条根轨迹分支沿着与实轴正方向夹角为φa、交点为σa的一组渐近线趋向于无穷远处,且有:
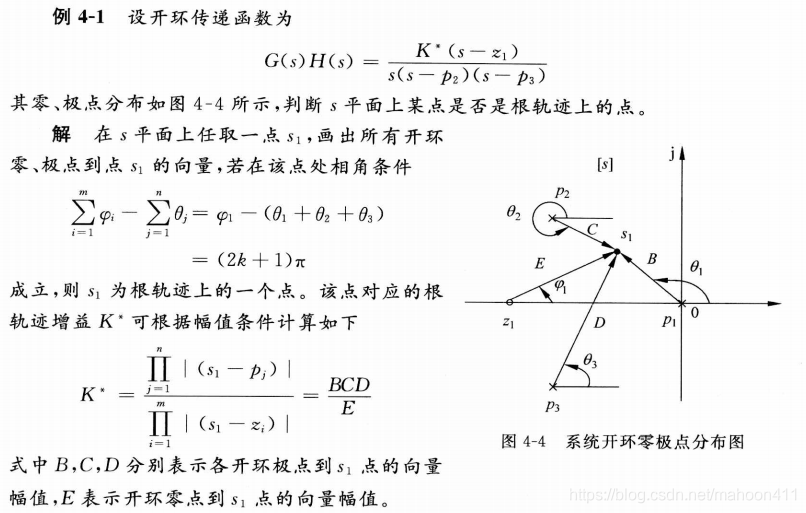
例题:
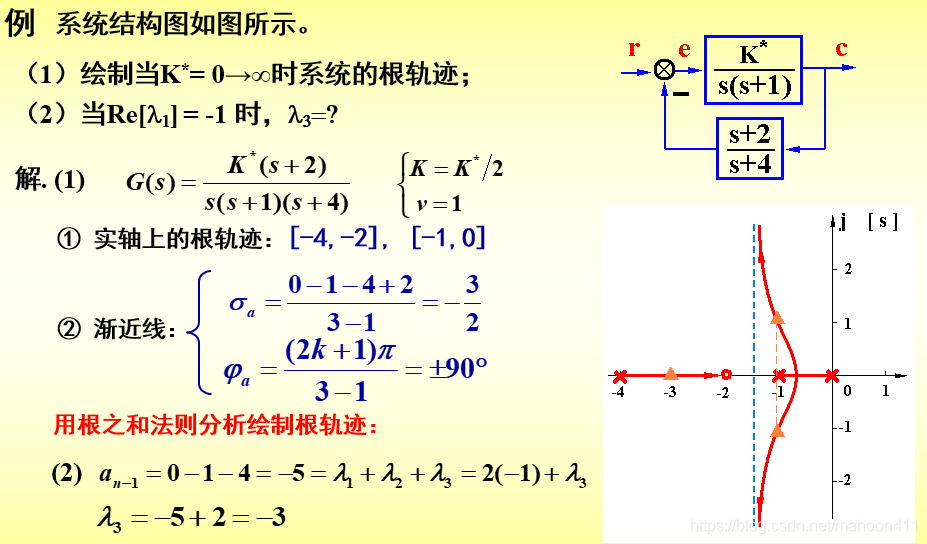
在此题中,绘制根轨迹的思路:
- 首先求出系统的开环传递函数,找出开环增益与根轨迹增益的关系。
- 利用法则三,求出实轴上的根轨迹。
- 利用法则五,求出终点趋于无穷远的根轨迹的渐近线。
- 利用法则四,找出分离点的大概位置,绘制出根轨迹的形状。
2.6 法则六:根轨迹的分离点
两条或两条以上根轨迹分支在s平面上相遇又分离的点,称为根轨迹的分离点,分离点的坐标d是下图方程的解。
例题:
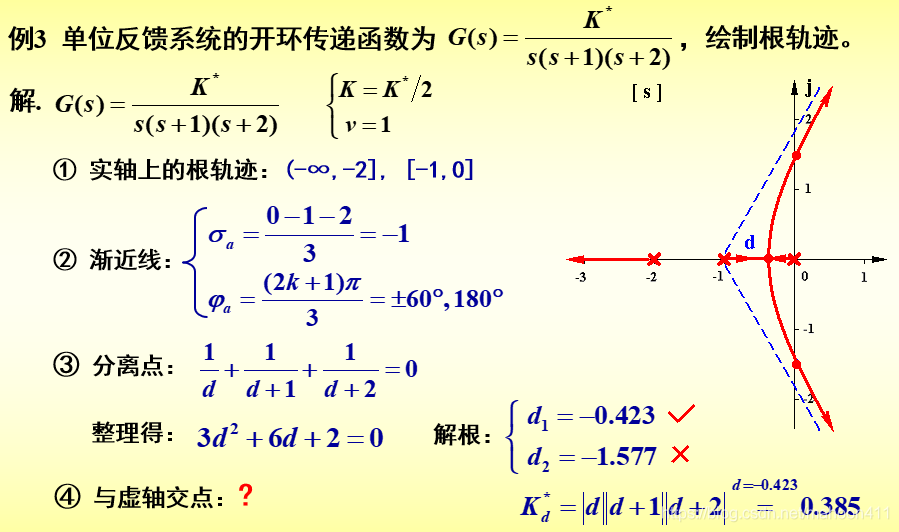
但上述例题中与虚轴的交点具体值无法求得,这就需要用到法则七:与虚轴的交点。
2.7 法则七:与虚轴的交点
- 法一:若根轨迹与虚轴相交,则意味着闭环特征方程出现纯虚根。故可在闭环特征方程中令s=jω,然后分别令方程的实部和虚部均为零,从中求得交点的坐标值及其相应的K*值。
- 法二:根轨迹与虚轴相交表明系统在相应K*值下处于临界稳定状态,故亦可用劳斯稳定判据去求出交点的坐标值及其相应的K*值。
此处的根轨迹增益称为临界根轨迹增益。