本篇为自动控制原理笔记(1):控制系统的一般模型~
1. 控制系统的一般模型模型
1.1 概论
-
自动控制:不需要人的直接参与而能控制某些物理量按照指定的规律变化。
-
开环控制 :信号由给定值至被控量单向传递。
-
闭环控制:信号沿前向通道和反馈通道往复循环。
-
对控制系统的性能要求:理论上被控量和给定值在任何时刻其变化规律都相等。
-
通常把系统受外加信号(给定值或扰动)作用后,被控量随时间变化的全过程称为系统的动态过程 (过渡过程)。 控制性能由动态过程表示。
-
系统的数学模型: 描述系统输入输出变量以及内部各变量之间关系的数学表达式。
1.2 拉普拉斯变换与微分方程
L[∫f(t)dt]=SF(S)+Sf−1(0)L[∫...∫f(t)dt...dt]=SnF(S)+∑Sn−i+1f−i(0)f−1(0)=∫f(t)dt∣t=0
L[dtdf(t)]=SF(S)−f(0)L[dtndnf(t)]=SnF(S)−∑S(n−i)f(i−1)(0)
f(∞)=t→∞limf(t)=s→0limSF(S)
- 传递函数:线性定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比。
G(S)=Ur(S)Uc(S)
-
G(S)取决于系统的结构与参数,与输入量的形式和大小无关。
-
对象的传递函数虽然结构、参数一样,但输入输出的物理量不同,则代表的物理意义不同。
-
传递函数分子多项式等于的根为零点 。传递函数分母多项式(特征方程)等于零的根为极点 。
1.3 动态结构图
- 组成:信号线(有方向性)、分支点(各处相等)、 相加点(有加减号)、 方框 (传递函数) 。
-
串联方框的等效:
G(S)=G1(S)G2(S),并联方框的等效:
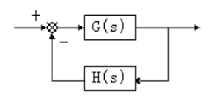
G(S)=G1(S)+G2(S)。方框反馈连接的等效:
φ(S)=1−G(S)H(S)G(S)。
-
相加点移动规则 :前向通道传递函数的乘积保持不变。分支点移动规则 :前向通道传递函数的乘积保持不变。
1.4 传递函数
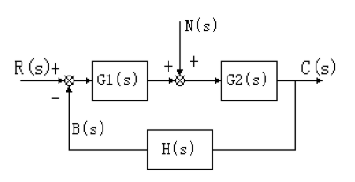
φ(S)=R(S)CR(S)=1+G1(S)G2(S)H(S)G1(S)G2(S)
-
n(t)作用下系统的闭环传递函数
φN(S)=N(S)CN(S)=1+G1(S)G2(S)H(S)G2(S)
C(S)=CR(S)+CN(S)=1+G1(S)G2(S)H(S)G1(S)G2(S)R(S)+1+G1(S)G2(S)H(S)G2(S)N(S)
Φr(S)=R(S)Er(S)=1+G1(S)G2(S)H(S)1
-
n(t)作用下系统的误差传递函数,令
r(t)=0
Φn(S)=N(S)En(S)=1+G1(S)G2(S)H(S)−G2(S)H(S)
E(S)=1+G1(S)G2(S)H(S)R(S)−G2(S)H(S)N(S)
- 反馈系统的优点:系统的输出只取决于反馈通路的传递函数及输入信号,而与前向通路的传递函数几乎无关。
- 系统的输出与干扰信号
N(S)无关,具有很强的抑制干扰的能力 。系统的总误差很小,具有较高的控制精度 。