系列文章目录
前言
利用增加辅助装置改善系统性能的方法
一、超前校正
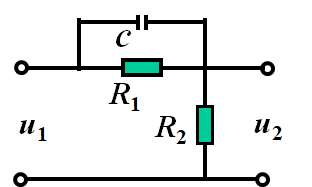
G c ( s ) = T s + 1 α T s + 1 G_c(s)=\frac{Ts+1}{αTs+1} Gc(s)=αTs+1Ts+1
α = R 2 R 1 + R 2 α=\frac{R_2}{R_1+R_2} α=R1+R2R2
T = R 1 C T=R_1C T=R1C
二、滞后校正
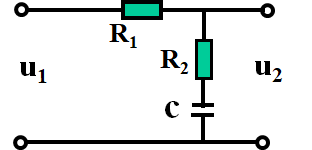
G c ( s ) = T s + 1 β T s + 1 G_c(s)=\frac{Ts+1}{βTs+1} Gc(s)=βTs+1Ts+1
β = R 1 + R 2 R 1 + R 2 β=\frac{R_1+R_2}{R_1+R_2} β=R1+R2R1+R2
T = R 2 C T=R_2C T=R2C
三、PID有源校正
1.P(比例)控制

G c ( s ) = R 2 R 1 G_c(s)=\frac{R_2}{R_1} Gc(s)=R1R2
2.D (微分)控制

G c ( s ) = R C s G_c(s)=RCs Gc(s)=RCs
3.I (积分)控制

G c ( s ) = 1 R C s G_c(s)=\frac{1}{RCs} Gc(s)=RCs1
四、频率响应法校正
1.超前校正设计
利用超前网络的相角超前特性
设计步骤:
(1) 据 e s s e_{ss} ess的要求确定原系统的开环增益K;
(2) 绘未校正系统Bode图, 求未校系统 γ 0 γ_0 γ0 和 K g K_g Kg ;
(3) 计算需要增加的超前相角jm , 由 φ m φ_m φm计算 α α α
(4)求未校正系统的 L ( ω c 2 ) = 10 l g α L(ω_{c2})=10lgα L(ωc2)=10lgα求出 ω c 2 ω_{c2} ωc2
ω m = 1 T α ω_{m}=\frac{1}{T\sqrt{α}} ωm=Tα1求出T
(5)超前校正网络 G c ( s ) = T s + 1 α T s + 1 G_c(s)=\frac{Ts+1}{αTs+1} Gc(s)=αTs+1Ts+1
(6)检验
超前校正优缺点
优点:
调节时间减小
超调量减小
缺点:
抗干扰能力下降
2.滞后校正设计
利用滞后网络的高频幅值衰减特性
设计步骤:
(1) 据 e s s e_{ss} ess的要求确定原系统的开环增益K;
(2) 绘未校正系统Bode图, 求未校系统 γ 0 γ_0 γ0
(3) 求出未校正系统 γ 2 = γ + ℇ γ_2=γ+ℇ γ2=γ+ℇ对应的 ω c 2 ω_{c2} ωc2
(4)令未校正系统的 L ( ω c 2 ) = 20 l g β L(ω_{c2})=20lgβ L(ωc2)=20lgβ求出 β β β
(5) 1 T = 0.1 ω c 2 \frac{1}{T}=0.1ω_{c2} T1=0.1ωc2 求出T
(6)检验
滞后校正优缺点
优点:
超调量减小
缺点:
调节时间增大