第一章自动控制的一般概念
导语
本博文基于自动控制原理(胡寿松第六版)全书,将知识点总结,便于同学们的复习,该篇属于自动控制原理的理论篇,理论性东西较多,阅读起来难免有点枯燥,但既然坚持了,那就把它读完吧,因作者也是在复习考研,也是刚毕业的大学生,总结的东西难免会有所纰漏,如发现,请在评论区提醒,望共同进步,考研成功上岸!
1.1 自动控制的基本原理与方式
1.1.1 自动控制技术及应用
- 自动控制定义
在没有人直接参与的情况下,利用外加的设备或装置(控制装置或控制器),使机器、设备或生产过程(统称被控对象)的某个工作状态或参数(被控量)自动按照预定的规律运行。 - 自动控制应用
- 数控车床按照预定程序自动地切削工件;
- 化学反应炉的温度或压力自动地维持恒定;
- 雷达和计算机组成的导弹发射和制导系统,自动地将导弹引导到敌方目标;
- 无人驾驶飞机按照预定航迹自动升降和飞行;
- 人造卫星准确地进入预定轨道运行并回收等。
1.1.2 自动控制科学
- 经典控制理论
以传递函数为基础,主要研究单输入单输出、线性定常系统的分析和设计问题; - 现代控制理论
以状态为基础的状态空间法、贝尔曼动态规划法、庞特里亚金极小值原理、卡尔曼滤波器,主要研究具有高性能、高精度、多耦合回路的多变量系统的分析和设计问题。 - 自动控制科学分支
- 自适应控制;
- 混杂控制;
- 模糊控制;
- 神经网络控制等。
1.1.3 反馈控制原理
- 自动控制系统定义
将被控对象和控制装置按照一定的方式连接起来,组成一个有机总体,这个有机总体就是自动控制系统。 - 反馈控制原理
在反馈控制系统中,控制装置对被控对象施加的控制作用,是取自被控量的反馈信息,用来不断修正被控量和输入量之间的偏差,从而实现对被控对象进行控制的任务。 - 反馈、负反馈、正反馈、闭环控制
把取出输出量送回到输入端,并与输入信号进行比较产生偏差信号的过程,称为反馈;
若反馈的信号与输入信号相减,使产生的偏差越来越小,则为负反馈;
若反馈的信号与输入信号相减,使产生的偏差越来越大,则为正反馈;
反馈控制采用负反馈并利用偏差进行控制的过程,由于引入了被控量的反馈信息,整个控制过程成为闭合过程,故反馈控制也称为闭环控制。 - 负反馈控制原理
由负反馈产生偏差,并利用偏差进行控制直到最后消除偏差的过程。
1.1.4 反馈控制系统的基本组成
控制系统的基本组成如下:
- 测量元件:检测被控制的物理量。
常用的测量元件:
- 测速发电机:用于检测电动机轴的速度并转换为电压;
- 电位器、旋转变压器、自整角机:用于检测角度并转换为电压;
- 热电偶:用于检测温度并转换为电压。
- 给定元件:给出与期望的被控量相对应的系统输入量。
- 比较元件:把测量元件检测的被控量实际值与给定元件给出的输入量进行比较,求出它们的偏差。
常用的比较元件:
- 差动放大器;
- 机械差动装置;
- 电桥电路。
- 放大元件:将比较元件给出的偏差信号进行放大,用来推动执行元件去控制被控对象。
- 执行元件:直接推动被控对象,使其被控量发生变化。
常用的执行元件:阀、电动机、液压马达。 - 校正元件:结构或参数便于调整的元部件,用于串联或反馈的方式连接在系统中,以改善系统的性能。
- 典型的反馈控制系统基本组成原理图

注:
a.信号从输入端沿箭头方向到达输出端的传输通路称为前向通路;
b.系统输出量经测量元件反馈到输入端的传输通路称为主反馈通路;
c.前向通路与主反馈通路共同构成主回路;
d.只包含一个主反馈通路的系统称为单回路系统;
e.有两个或两个以上反馈通路的系统称为多回路系统; - 反馈控制系统上的外作用:有用输入、扰动
有用输入:决定系统被控量的变化规律;
扰动:系统不希望出现的外作用,扰动破坏有用输入对系统的控制;
常见的扰动:电源电压的波动、环境温度、压力以及负载变化、飞行中气流的冲击、航海中的波浪等。
1.1.5 自动控制系统基本控制方式
- 反馈控制方式
反馈控制方式是按照偏差进行控制的,其特点:不论什么原因使被控量偏离期望值而出现偏差时,必定会产生一个相应的控制作用去降低或消除这个偏差,使被控量与期望值趋于一致。
反馈控制方式优缺点:
a.具有抑制任何内、外扰动对被控量产生影响的能力,有较高的控制精度;
b.使用元件多,结构复杂,系统的性能分析和设计较麻烦。
反馈控制方式如下:

- 开环控制方式
开环控制方式是控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程,其特点:系统的输出量不会对系统的控制作用发生影响。开环控制分为:按给定量控制、按扰动控制。
① 按给定量控制:
其控制作用直接由系统的输入量产生,给定一个输入量,就有一个输出量与之相对应,控制精度完全取决于所用元件及校准的精度。
按给定量开环控制方式优缺点:
a.开环控制没有自动修正偏差的能力,抗扰动性较差;
b.结构简单、调整方便、成本低。
控制方式如下:

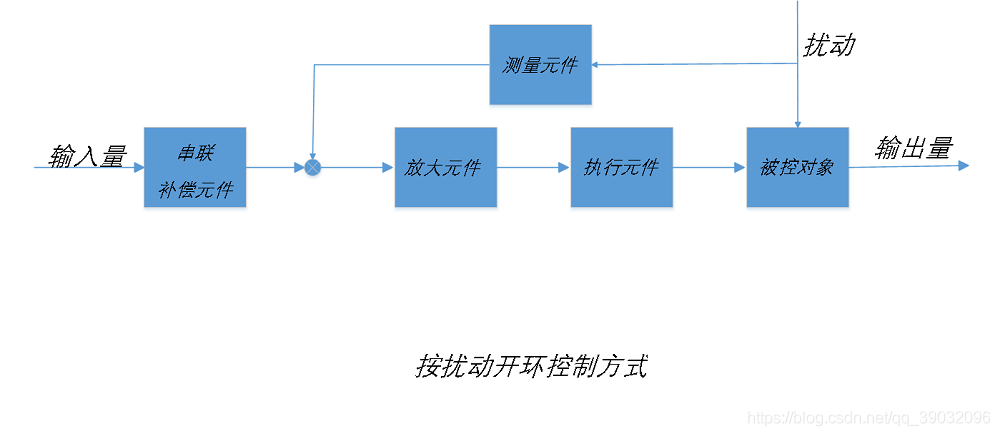
② 按扰动控制(顺馈控制)
利用可测量的扰动量,产生一种补偿作用,以降低或抵消扰动对输入量的影响,直接从扰动取得信息,并据以改变被控量。
按扰动开环控制方式优缺点:
a.抗扰动性好,控制精度较高;
b.只适合扰动可测量的场合。
控制方式如下:
- 复合控制方式
把按偏差控制与按扰动控制结合起来,对于主要扰动采用适当的补偿装置实现按扰动控制,同时,组成反馈控制系统实现按偏差控制,消除其余扰动产生的偏差,按偏差控制和按扰动控制相结合的控制方式成为复合控制方式。
控制方式如下:

1.2 自动控制系统示例
1.2.1 飞机-自动驾驶仪系统
- 工作原理
垂直陀螺仪作为测量元件用以测量飞机的俯仰角,当飞机以给定俯仰角水平飞行时,陀螺仪电位器没有电压输出;
如果飞机受到扰动,使俯仰角向下偏离期望值,陀螺仪电位器输出与俯仰角偏差成正比的信号,经放大器放大后,驱动舵机,一方面推动升降舵面向上偏转,产生使飞机抬头的转矩,以减小俯仰角偏差;同时带动反馈电位器滑臂,输出与舵偏角成正比的电压并反馈到输入端;
随着俯仰角偏差的减小,陀螺仪电位器输出信号越来越小,舵偏角也随之减小,直到俯仰角回到期望值,舵面恢复原来状态。 - 俯仰角控制系统方块图

1.2.2 磁盘驱动读取系统
- 工作原理
运行时,主轴马达让碟片转动,机械手臂可伸展让磁头在碟片上面进行读写操作,磁盘驱动器读取装置目标是将磁头准确定位。 - 磁盘驱动读取系统方框图

1.3 自动控制系统的分类
自动控制系统有多种分类方法,具体分类如下:
- 按控制方式分类
开环控制、反馈控制、复合控制 - 按元件类型分类
机械系统、电气系统、机电系统、液压系统、气动系统、生物系统 - 按系统功用分类
温度控制系统、压力控制系统、位置控制系统 - 按系统性能分类
线性系统和非线性系统、连续系统和离散系统、定常系统和时变系统、确定性系统和不确定性系统 - 按输入量变化规律分类
恒值系统、随动系统、程序控制系统
1.3.1 线性连续控制系统
线性连续控制系统可以用线性微分方程式描述,一般形式为: a 0 d n d t n c ( t ) + a 1 d n − 1 d t n − 1 c ( t ) + ⋯ + a n − 1 d d t c ( t ) + a n c ( t ) = b 0 d m d t m r ( t ) + b 1 d m − 1 d t m − 1 r ( t ) + ⋯ + b m − 1 d d t r ( t ) + b m r ( t ) a_0\frac{d^n}{dt^n}c(t)+a_1\frac{d^{n-1}}{dt^{n-1}}c(t)+\dots+a_{n-1}\frac{d}{dt}c(t)+a_nc(t)\\ =b_0\frac{d^m}{dt^m}r(t)+b_1\frac{d^{m-1}}{dt^{m-1}}r(t)+\dots+b_{m-1}\frac{d}{dt}r(t)+b_mr(t) a0dtndnc(t)+a1dtn−1dn−1c(t)+⋯+an−1dtdc(t)+anc(t)=b0dtmdmr(t)+b1dtm−1dm−1r(t)+⋯+bm−1dtdr(t)+bmr(t)式中: c ( t ) 是 被 控 量 ; r ( t ) 是 系 统 输 入 量 。 系 数 a 0 , a 1 , … , a n , b 0 , b 1 , … , b m 是 常 数 时 , 称 为 定 常 系 统 ; 系 数 a 0 , a 1 , … , a n , b 0 , b 1 , … , b m 随 时 间 变 化 时 , 称 为 时 变 系 统 。 线 性 定 常 连 续 系 统 按 其 输 入 量 的 变 化 规 律 分 为 : 恒 值 控 制 系 统 、 随 动 系 统 、 程 序 控 制 系 统 。 c(t)是被控量;r(t)是系统输入量。系数a_0,a_1,\dots,a_n,b_0,b_1,\dots,b_m是常数时,称为定常系统;\\系数a_0,a_1,\dots,a_n,b_0,b_1,\dots,b_m随时间变化时,称为时变系统。\\线性定常连续系统按其输入量的变化规律分为:恒值控制系统、随动系统、程序控制系统。 c(t)是被控量;r(t)是系统输入量。系数a0,a1,…,an,b0,b1,…,bm是常数时,称为定常系统;系数a0,a1,…,an,b0,b1,…,bm随时间变化时,称为时变系统。线性定常连续系统按其输入量的变化规律分为:恒值控制系统、随动系统、程序控制系统。
- 恒值控制系统(调节器)
恒值控制系统的输入量是一个常值,要求被控量亦等于一个常值。
恒值控制系统分析、设计的重点:研究各种扰动对被控对象的影响以及抗扰动的措施。
工业控制中,如果被控量是温度、流量、压力、液位等生产过程参量时,这种控制系统称为过程控制系统。 - 随动控制系统(跟踪系统)
随动控制系统的输入量是预先未知的随时间任意变化的函数,要求被控量以尽可能小的误差跟随输入量的变化。
随动控制系统分析、设计的重点:研究被控量跟随的快速性和准确性。
在随动系统中,如果被控量是机械位置或其导数时,这类系统称之为伺服系统。 - 程序控制系统
程序控制系统的输入量是按预定规律随时间变化的函数,要求被控量迅速、准确地加以复现。
1.3.2 线性定常离散控制系统
离散系统指系统的某处或多处的信号为脉冲序列或数码形式,因而信号在时间是离散的。
离散系统用差分方程来描述,线性差分方程的一般形式为: a 0 c ( k + n ) + a 1 c ( k + n − 1 ) + ⋯ + a n − 1 c ( k + 1 ) + a n c ( k ) = b 0 r ( k + m ) + b 1 r ( k + m − 1 ) + ⋯ + b m − 1 r ( k + 1 ) + b m r ( k ) a_0c(k+n)+a_1c(k+n-1)+\dots+a_{n-1}c(k+1)+a_nc(k)\\=b_0r(k+m)+b_1r(k+m-1)+\dots+b_{m-1}r(k+1)+b_mr(k) a0c(k+n)+a1c(k+n−1)+⋯+an−1c(k+1)+anc(k)=b0r(k+m)+b1r(k+m−1)+⋯+bm−1r(k+1)+bmr(k)式中: m ≤ n , n 为 差 分 方 程 的 次 数 ; a 0 , a 1 , … , a n 和 b 0 , b 1 , … , b m 为 常 系 数 ; r ( k ) , c ( k ) 分 别 为 输 入 和 输 出 采 样 序 列 。 m\leq{n},n为差分方程的次数;a_0,a_1,\dots,a_n和b_0,b_1,\dots,b_m为常系数;\\ r(k),c(k)分别为输入和输出采样序列。 m≤n,n为差分方程的次数;a0,a1,…,an和b0,b1,…,bm为常系数;r(k),c(k)分别为输入和输出采样序列。
1.3.3 非线性控制系统
系统中只要有一个元部件的输入-输出特性是非线性的,这类系统称为非线性控制系统;
非线性方程的特点:系数与变量有关,方程中含有变量及其导数的高次幂或乘积项,如: d 2 y d t 2 + y ( t ) d y d t + y 2 ( t ) = r ( t ) \frac{d^2 y}{dt^2}+y(t)\frac{dy}{dt}+y^2(t)=r(t) dt2d2y+y(t)dtdy+y2(t)=r(t)
1.4 对自动控制系统的基本要求
1.4.1 控制系统的基本要求
自动控制系统的基本要求为:稳定性、快速性、准确性。
- 稳定性
稳定性是保证控制系统正常工作的先决条件。
线性自动控制系统的稳定性是由系统结构和参数决定的,与外界因素无关。
当系统受到扰动或有输入量时,系统过程不会立即完成,而是有一定的延缓,这使得被控量恢复期望值或跟踪输入量有一个时间过程,称为过渡过程;
过渡过程呈现振荡形式,如果这个振荡过程是逐渐减弱的,系统最后可以达到平衡状态,控制目的得以实现,称为稳定系统;
如果这个振荡过程是逐步增强的,系统被控量将失控,称为不稳定系统。 - 快速性
控制系统必须对过渡过程的形式和快慢提出要求,称为动态性能。 - 准确性
由于系统结构,外作用形式,摩擦、间隙等非线性因素的影响,被控量的稳态值与期望值之间会有误差存在,称为稳态误差。
1.4.2 典型外作用
典型的外作用函数:阶跃函数、斜坡函数、脉冲函数、正弦函数。
- 阶跃函数
数学表达式如下:
f ( t ) = { = 0 , t < 0 = R , t ≥ 0 f(t)=\left\{ \begin{aligned}&= 0,t<0 \\&= R,t\geq0 \end{aligned} \right. f(t)={ =0,t<0=R,t≥0
幅值 R = 1 R=1 R=1的阶跃函数称为单位阶跃函数,用 1 ( t ) 1(t) 1(t)表示,幅值为 R R R的阶跃函数可以表示为 f ( t ) = R ⋅ 1 ( t ) f(t)=R·1(t) f(t)=R⋅1(t),在任意时刻 t 0 t_0 t0出现的阶跃函数表示为 f ( t − t 0 ) = R ⋅ 1 ( t − t 0 ) f(t-t_0)=R·1(t-t_0) f(t−t0)=R⋅1(t−t0)
一般将阶跃函数作用下的响应特性作为评价系统动态性能指标的依据。
单位阶跃函数图像如下:

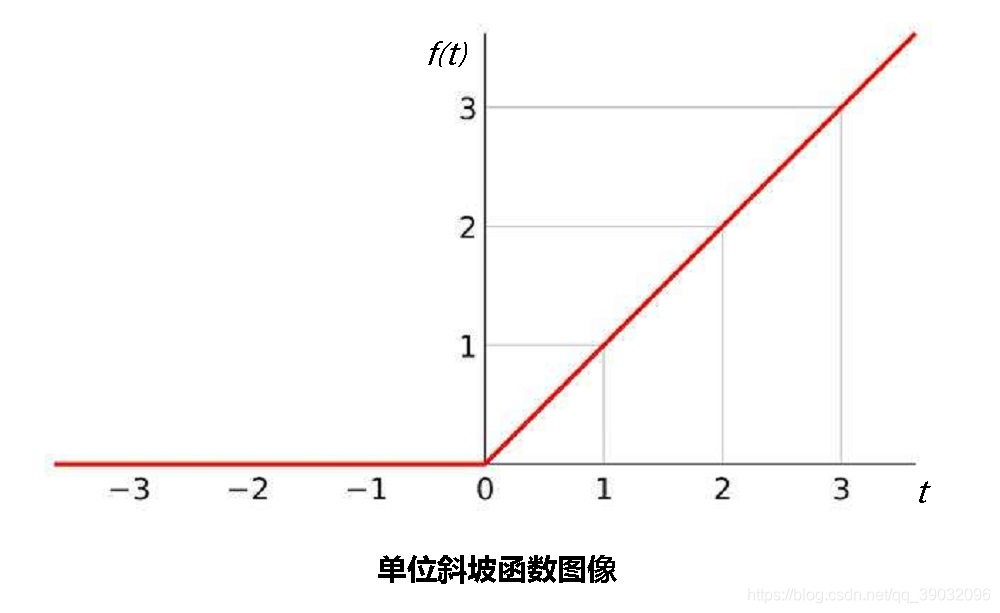
- 斜坡函数
数学表达式如下:
f ( t ) = { = 0 , t < 0 = R t , t ≥ 0 f(t)=\left\{ \begin{aligned}&= 0,t<0 \\&= Rt,t\geq0 \end{aligned} \right. f(t)={ =0,t<0=Rt,t≥0
单位斜坡函数图像如下:
- 脉冲函数
脉冲函数定义为:
f ( t ) = lim t 0 → 0 A t 0 [ 1 ( t ) − 1 ( t − t 0 ) ] f(t)=\lim_{t_0\rightarrow0}\frac{A}{t_0}[1(t)-1(t-t_0)] f(t)=t0→0limt0A[1(t)−1(t−t0)]
面积 A = 1 A=1 A=1的脉冲函数称为单位脉冲函数或 δ \delta δ函数;
强度为 A A A的脉冲函数表示为 f ( t ) = A δ ( t ) f(t)=A\delta(t) f(t)=Aδ(t);
在 t 0 t_0 t0时刻出现的单位脉冲函数表示为 δ ( t − t 0 ) \delta(t-t_0) δ(t−t0)。 - 正弦函数
数学表达式如下:
f ( t ) = A sin ( ω t − ϕ ) f(t)=A\sin(\omega{t}-\phi) f(t)=Asin(ωt−ϕ)式中, A 为 正 弦 函 数 的 振 幅 ; ω = 2 π f 为 正 弦 函 数 角 频 率 ; ϕ 为 初 始 相 角 。 A为正弦函数的振幅;\omega=2\pi{f}为正弦函数角频率;\phi为初始相角。 A为正弦函数的振幅;ω=2πf为正弦函数角频率;ϕ为初始相角。
1.5 自动控制系统的分析与设计工具(了解)
- 系统辨识工具箱( s y s t e m i d e n t i f i c a t i o n t o o l b o x system identification toolbox systemidentificationtoolbox);
- 控制系统工具箱( c o n t r o l s y s t e m t o o l b o x control system toolbox controlsystemtoolbox);
- 鲁棒控制工具箱( r o b u s t c o n t r o l t o o l b o x robust control toolbox robustcontroltoolbox);
- 模型预测控制工具箱( m o d e l p r e d i c t i v e c o n t r o l t o o l b o x model predictive control toolbox modelpredictivecontroltoolbox);
- 模糊逻辑工具箱( f u z z y l o g i c t o o l b o x fuzzy logic toolbox fuzzylogictoolbox);
- 非线性控制设计模块( n o n l i n e a r c o n t r o l d e s i g n b l o c k e t nonlinear control design blocket nonlinearcontroldesignblocket)。