在中国大学mooc学习华中科技大学自动控制原理,特写系列博客来记录学习的过程。
1 介绍
1.1 要求
自动控制系统的要求总结为以下四个字“稳,快,平,准”:
① 稳:稳定性是保证控制系统能够正常工作的先决条件。
② 快:要求被控制量由初始值变为另一希望值,系统性能能够快速响应。
③ 平:当被控制量由初始值变为另一个希望值时,控制系统不会出现超调现象。
④ 准:如果要求被控制量由初始值变为另一个希望值时,在变化过程结束后,被控制量能够达到希望值。
1.2 学习内容
系列课程主要从一下五个方面来学习自动控制系统:
一,自动控制系统的数学模型:对系统数学建模来找到对应的关系
二,自动控制系统的时域分析:从时域的角度来分析系统的性能
三,自动控制系统的根轨迹分析。
四,自动控制系统的频域分析。
五,自动控制系统的校正。
1.3 简单控制系统
一,线性/非线性
①,线性系统:满足叠加性与齐次性f(x1+x2)=f(x1)+f(x2),kf(x) = f(kx).
②,非线性系统:不满足叠加性
二,集中参数/分布参数系统
①,集中参数系统:变量仅仅是时间的函数:动态模型通常是微分方程
②,分布参数系统:变量不仅仅是时间的函数还有其他的(比如说空间):动态模型通常是偏微分方程
三, 定常系统/时变系统
①,定常系统:微分方程的各项系数为常数
②,时变系统:微分方程的各项系统随是时间的变化而变化
四,单输入单输出系统/多输入多输出系统
①,单输入单输出系统:一个输入一个输出
②,多输入多输出系统:多个输入或者多个输出
2 数学模型
数学模型:描述系统(或环节)的输出变量与输入变量(或内部变量)之间关系的数学表达式
为什么要创建数学模型:区别于经验主义,从理论与实践相结合分析问题以便定量的给出系统中一些变量之间的相互关系,从而对控制系统进行各种分析和设计。包括稳定性和动态响应的性能分析。
数学模型一般包括:
① 静态关系:利用代数方程建模
② 动态关系:利用微分方程和偏微分方程(连续系统),差分方程(离散系统) 来表达系统与时间等关系变化的规律
建立数学模型的方法:
一,机理建模:在已知系统各种影响关系和定理的情况下根据各种定理来建立数学模型。
二,实验建模:利用实验的方式,根据输入和输出来查找适当的数学模型去逼近这个响应过程(如函数拟合)。
要求:
一,准确性:必须保证准确才是有意义的建模。
二,简单性:在允许的范围内尽量的简单,忽略次要因素从而简化分析。
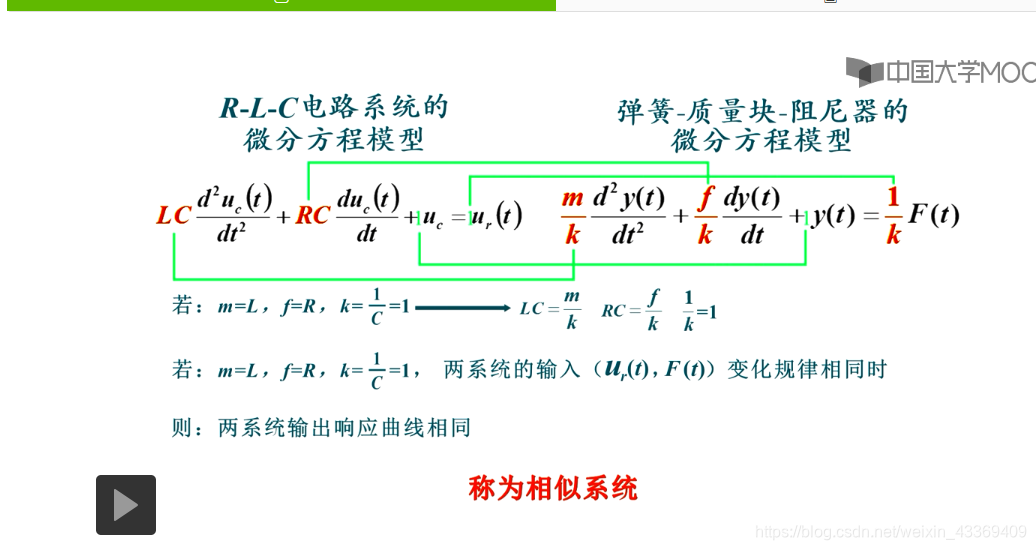
2.1 微分方程模型
例子:位移y(t) 与用力f(t)的关系
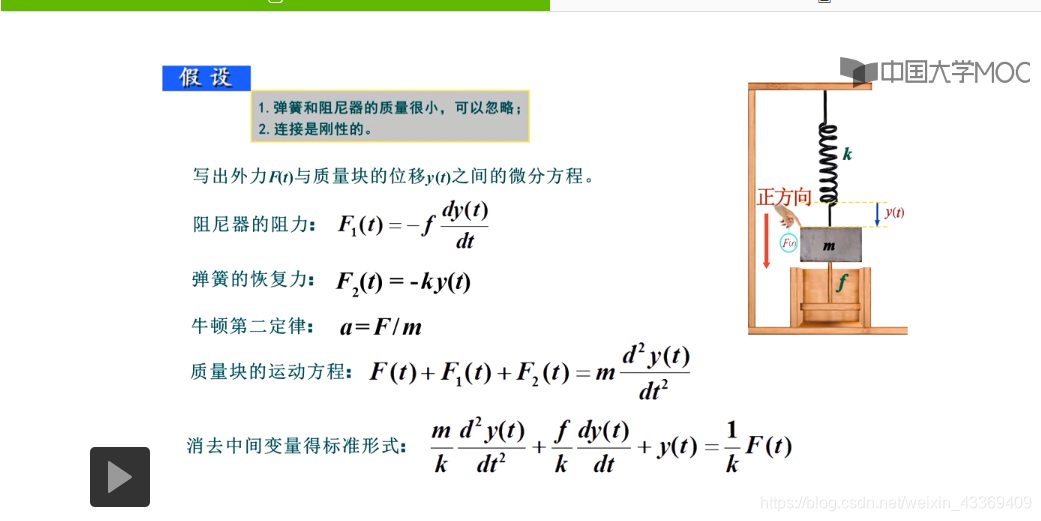
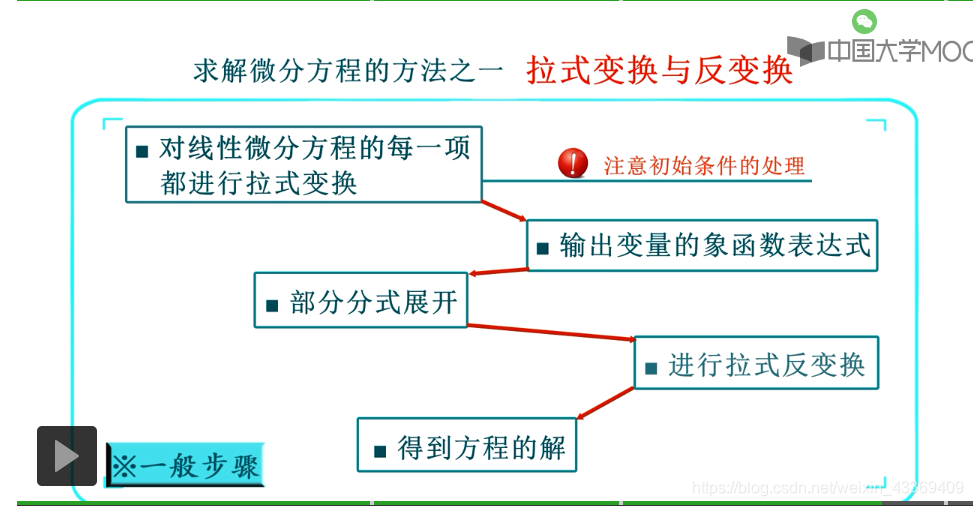
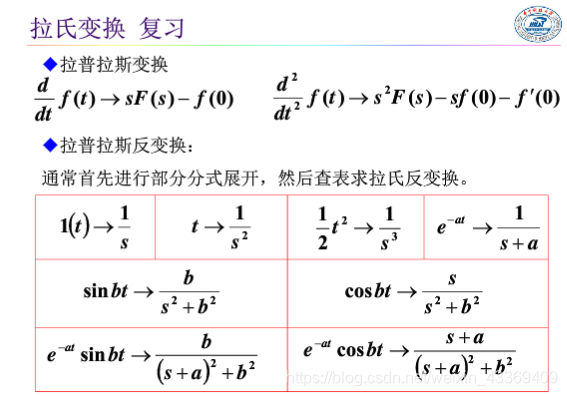
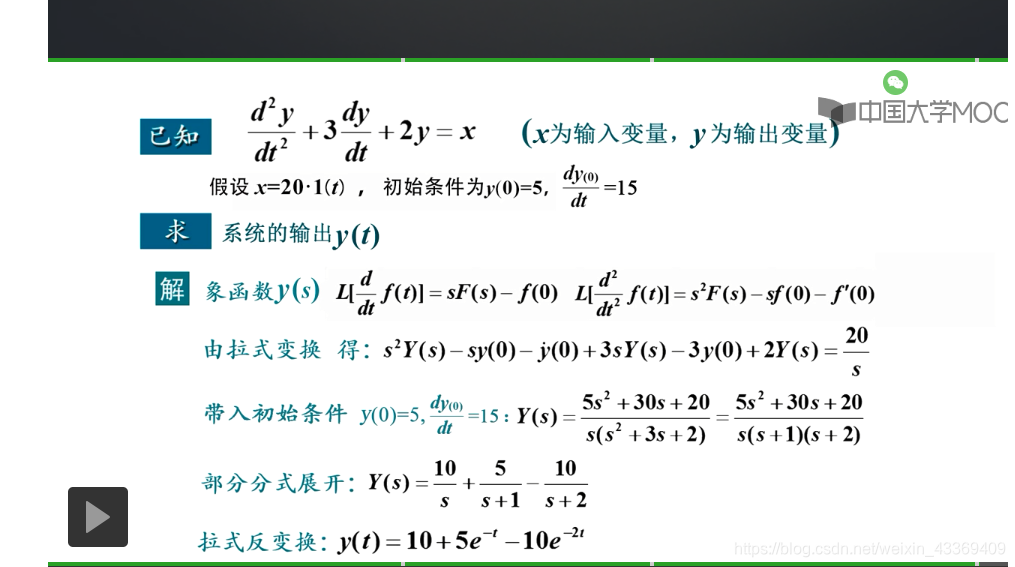
求解微分方程