B站视频链接:
https://www.bilibili.com/video/BV1hz411q7hy
https://www.bilibili.com/video/BV18K4y187iB
文章目录
2.1.1 两种建立数学模型的方法
- 分析法(机理建模)
- 机理建模:主要利用电路、机械等物理定律来建立模型。
- 适用于比较简单的模型。
- 实验法(系统辨识)
- 对系统加输入,得输出,通过输入输出数据估算出系统的数学模型。适用于比较复杂的系统。
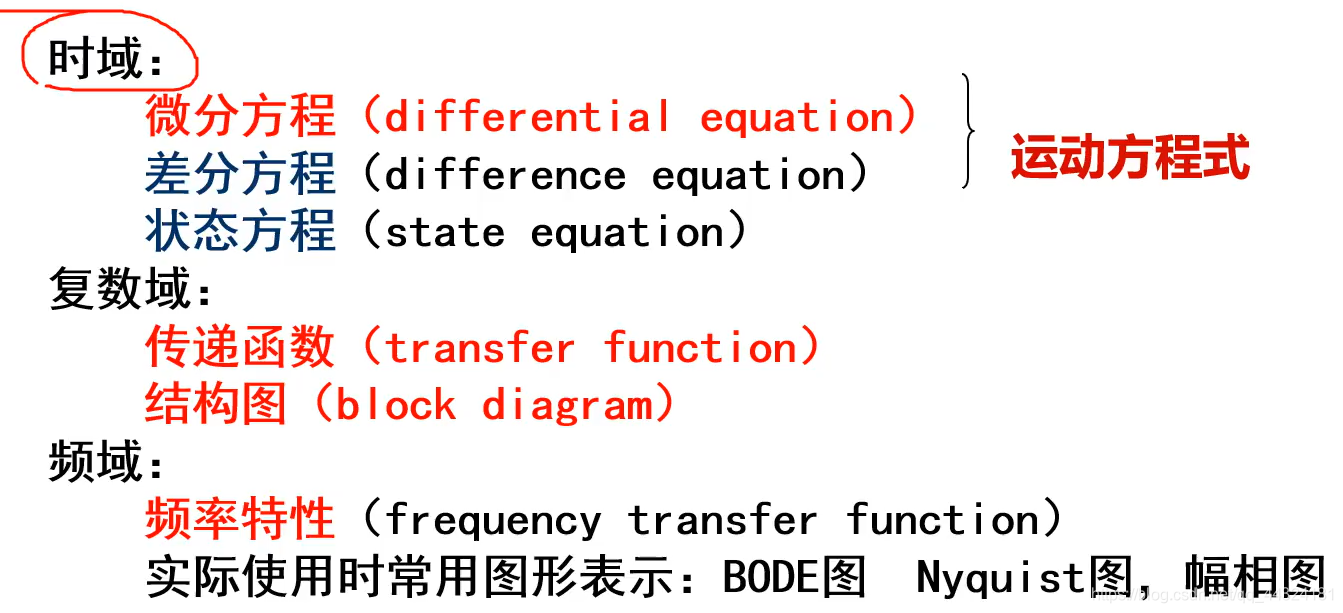
2.1.2 数学模型的分类
2.1.3 线性元件的微分方程
- 对于同一个系统,选择不同的输入和输出,会得到不同的数学模型。(例1(1)(2))
- 不同的物理系统,可能有相似的数学模型。(例1(1)和例3)
- 列写元件微分方程的步骤
- 确定输入量和输出量
- 通过物理规律得出与输入量、输出量有关的方程
- 消去中间变量
- 化为标准形式(输入在右边,输出在左边,按导数降序排列)
例1
- 试列写图示RL电路的运动方程。
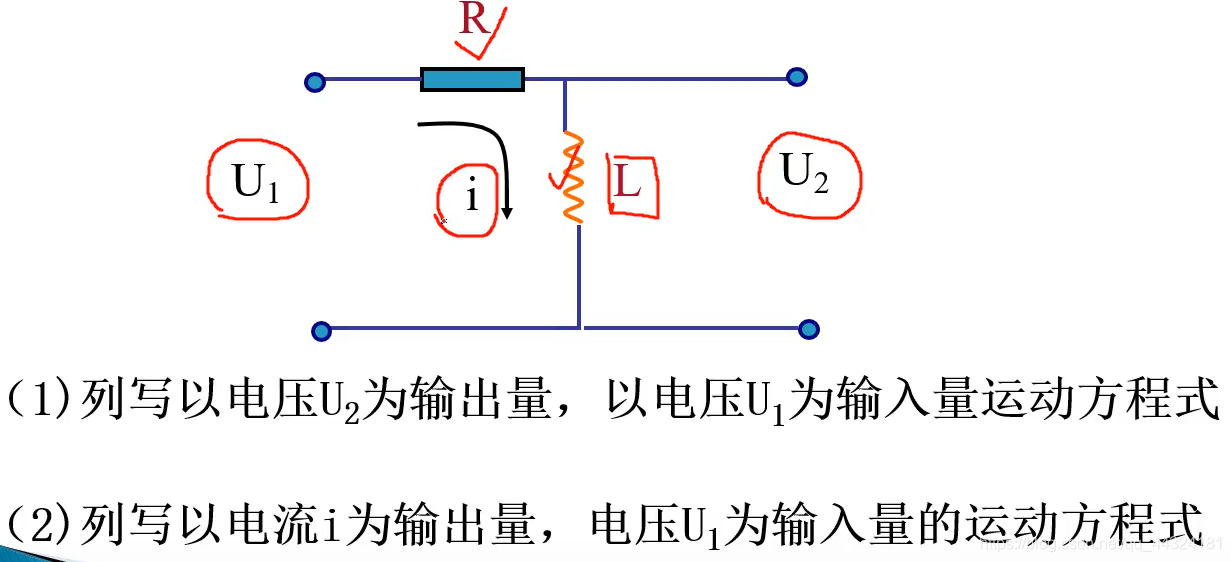
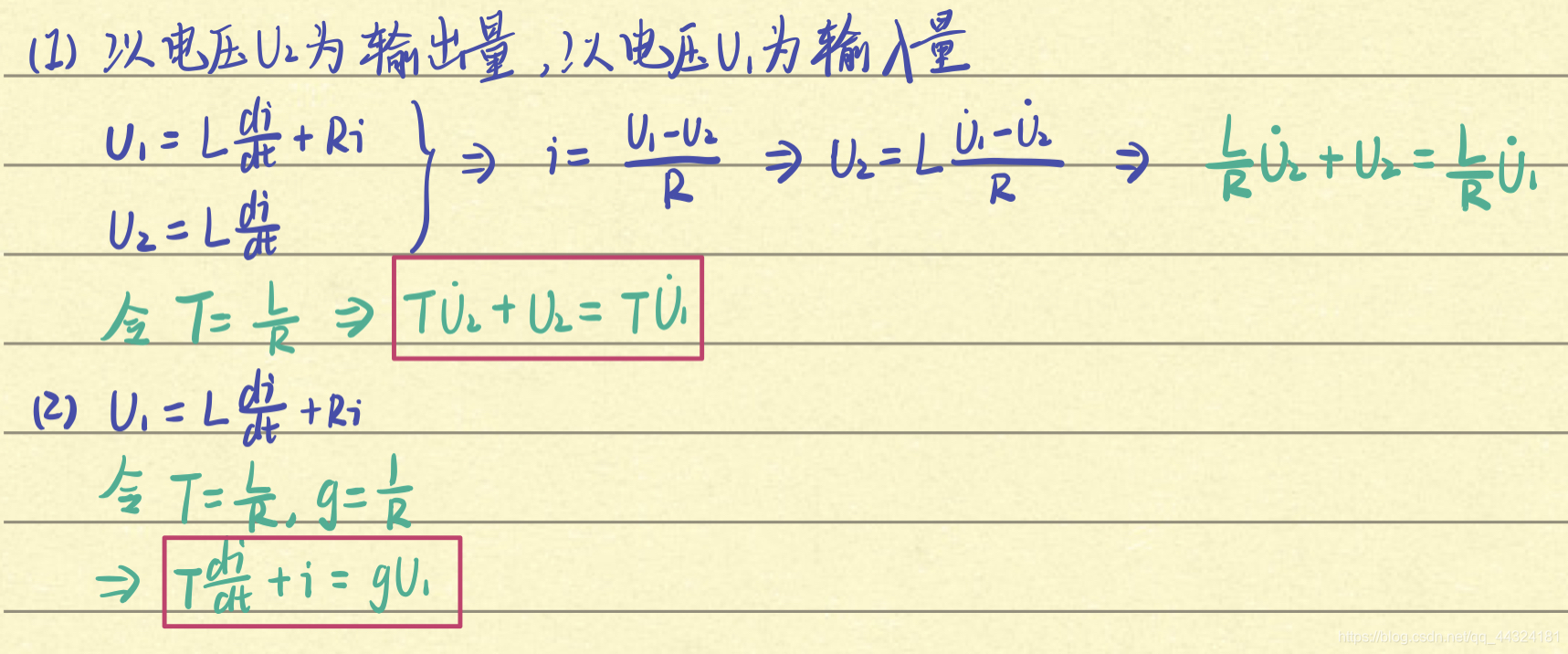
- 解答:
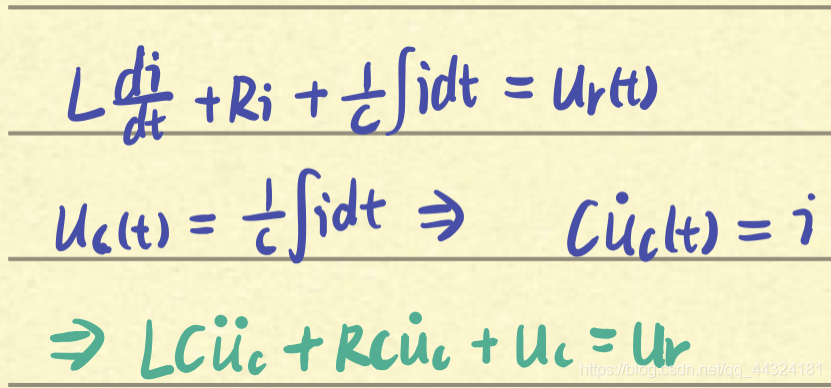
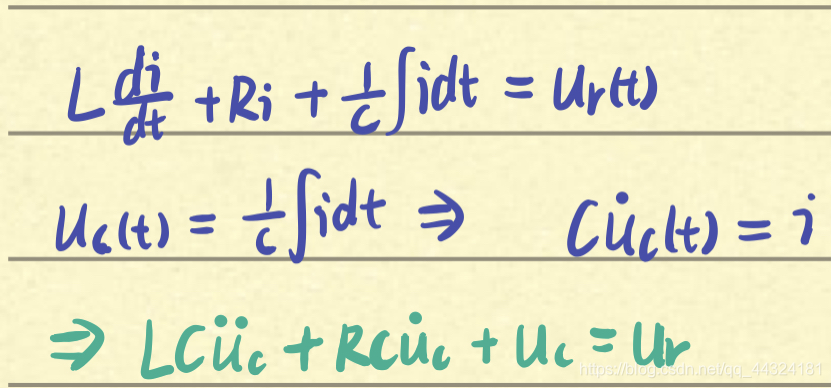
例2
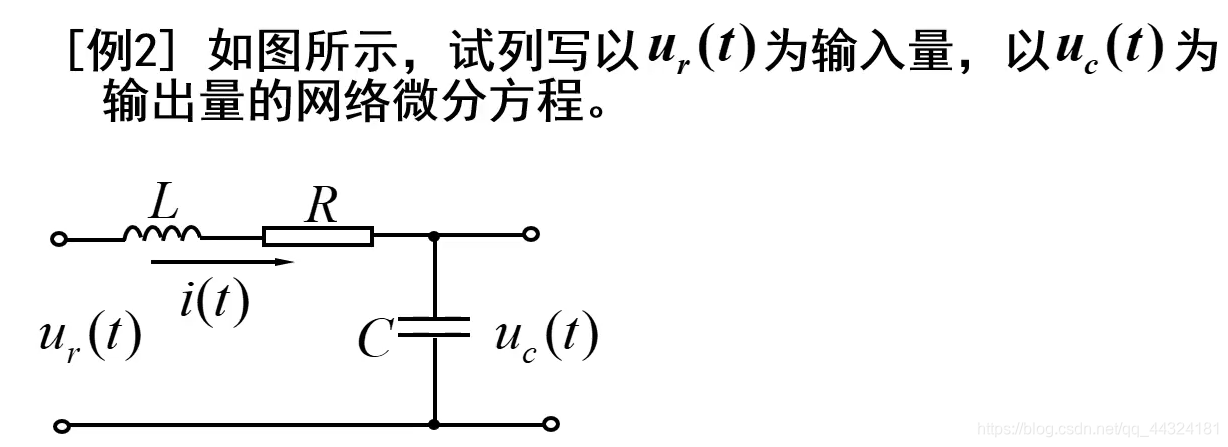
- 解答:
例3
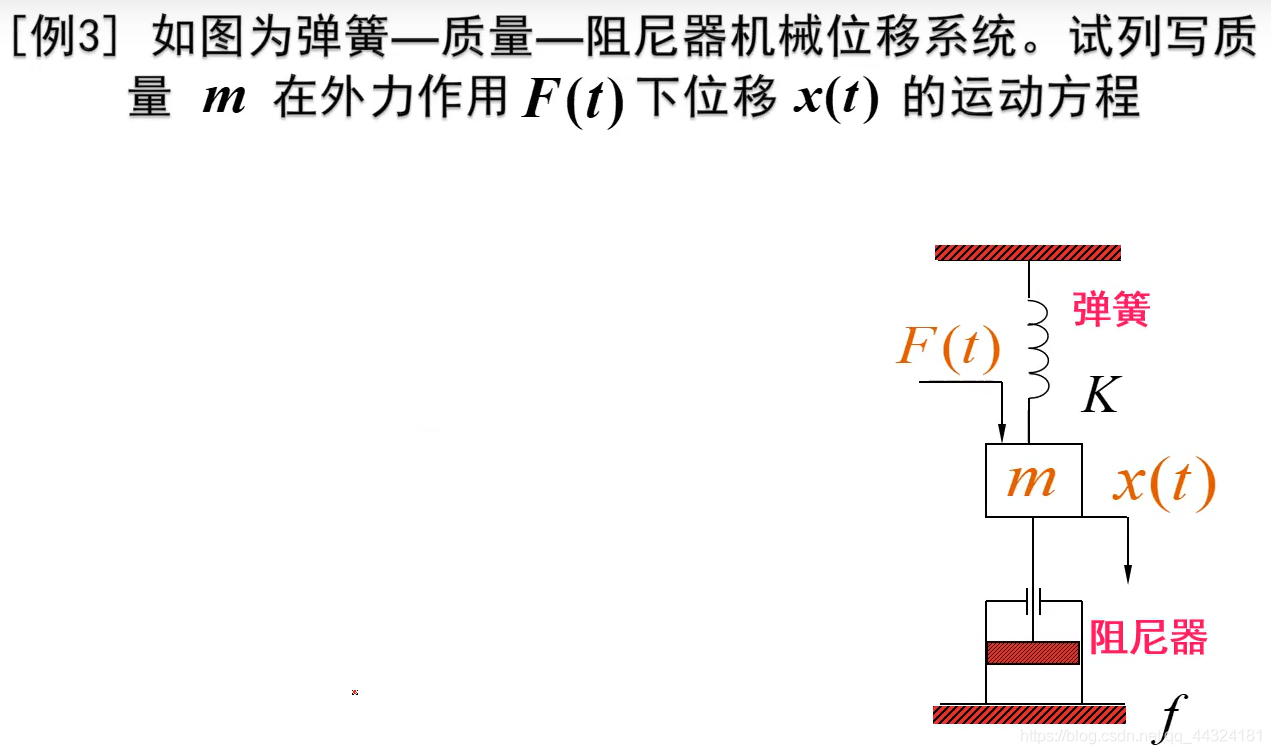
- 解答:(本题忽略重力)
- f f f:阻尼系数
- K K K:弹簧弹性系数
- F 1 F_{1} F1:阻尼器的阻尼力,其方向与运动方向相反,其大小与运动速度成正比。
- F 2 F_{2} F2:弹簧弹性力。其方向与运动方向相反,其大小与位移成正比。
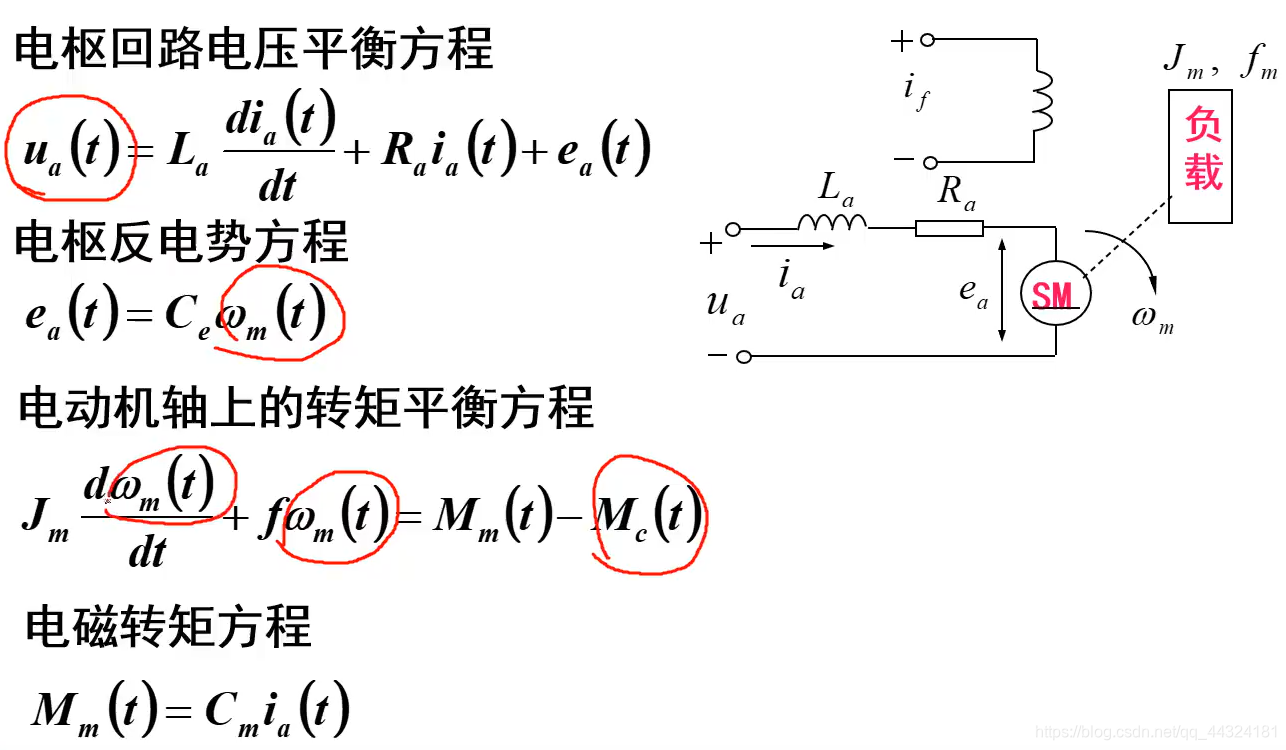
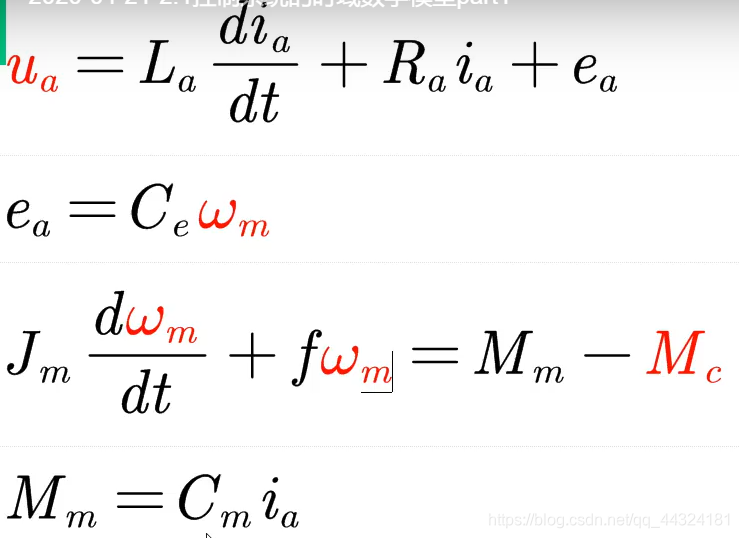
例4
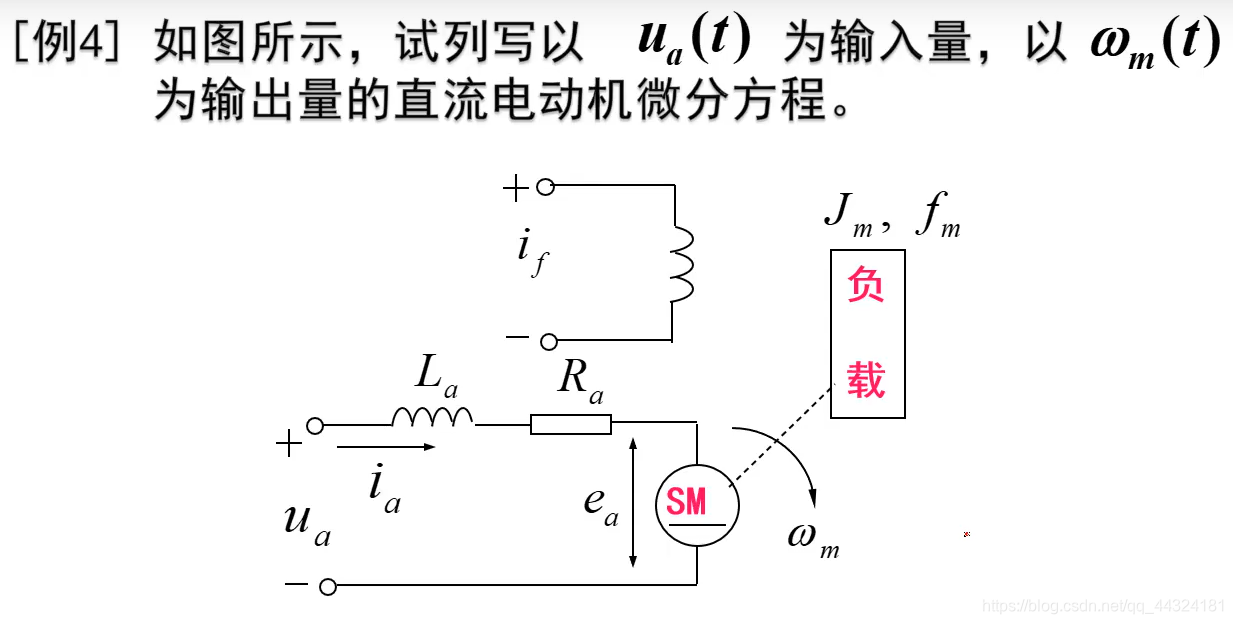
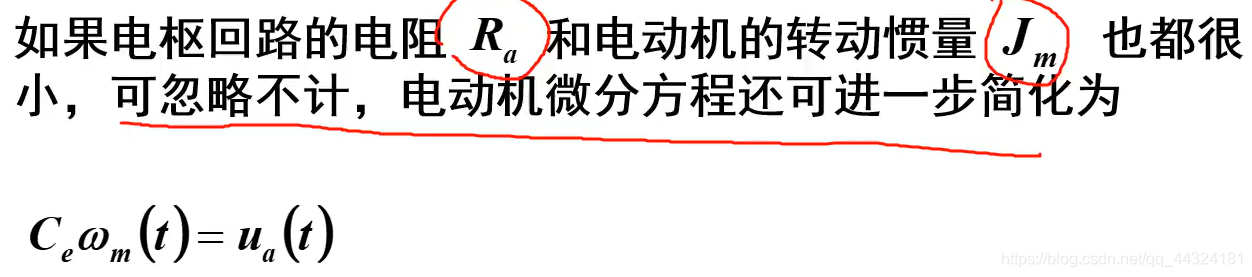
- 直流电动机的运动受到以下4个方程约束
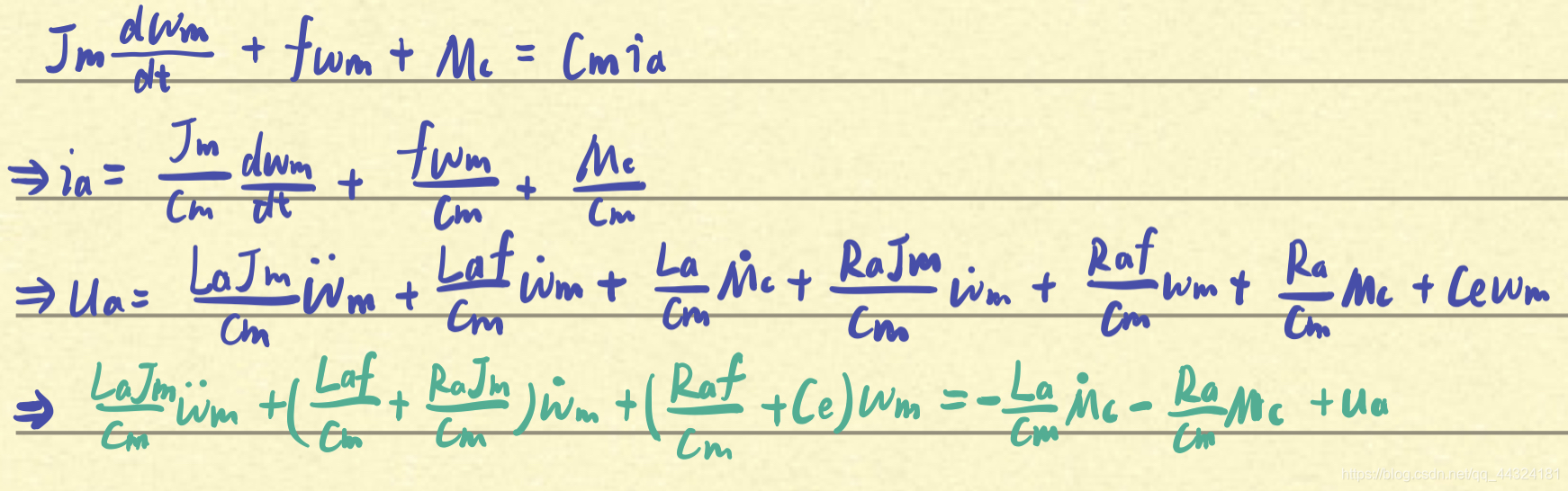
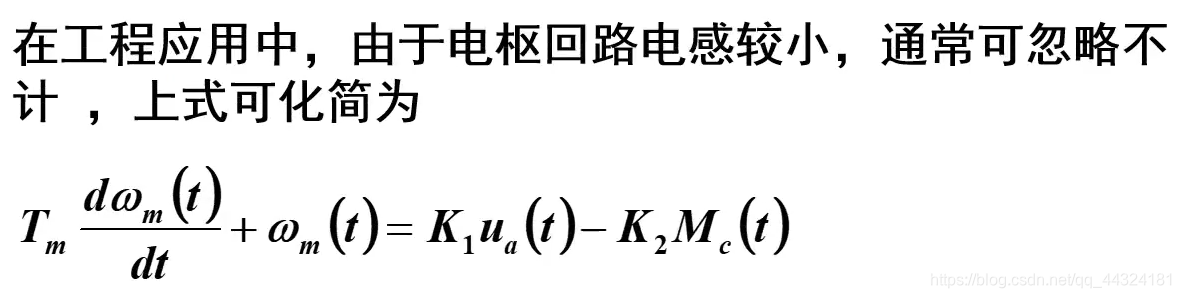
- 化简下面式子,只保留红色的变量
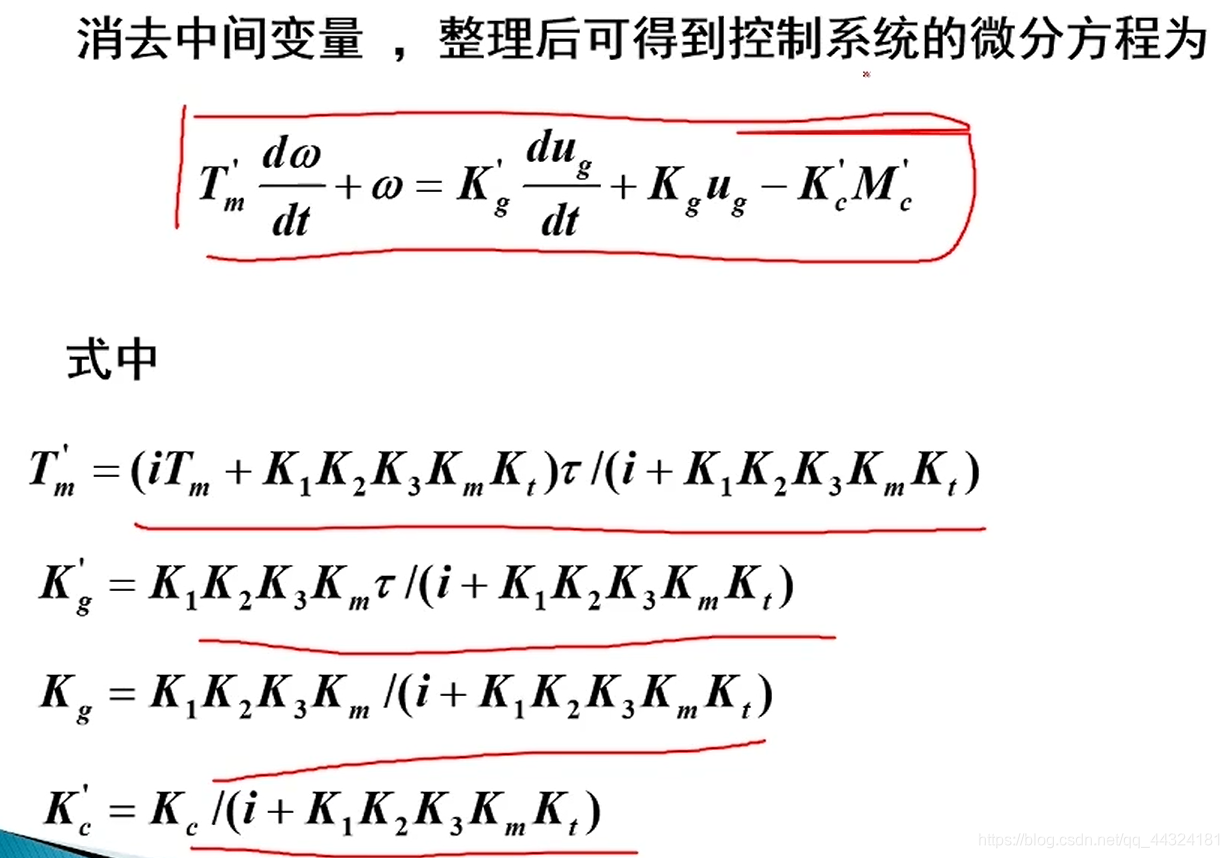
2.1.4 控制系统微分方程的建立
- 控制系统微分方程的建立步骤
- 确定系统的输入量与输出量
- 根据物理或化学定律,按系统工作的信号流向,写出每一个元件的微分方程
- 消去中间变量
- 化为标准形式(输入在右边,输出在左边,按导数降幂排列)
- 建立模型时要注意:各元件模型尽量简单(次要因素可以忽略)、注意信号流向的单向性(消元时请按顺序消元)
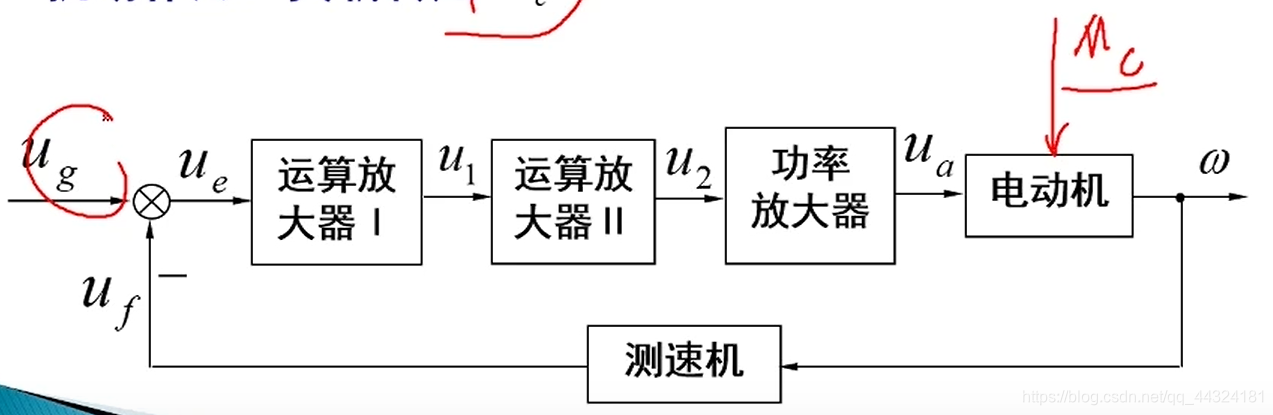
例6
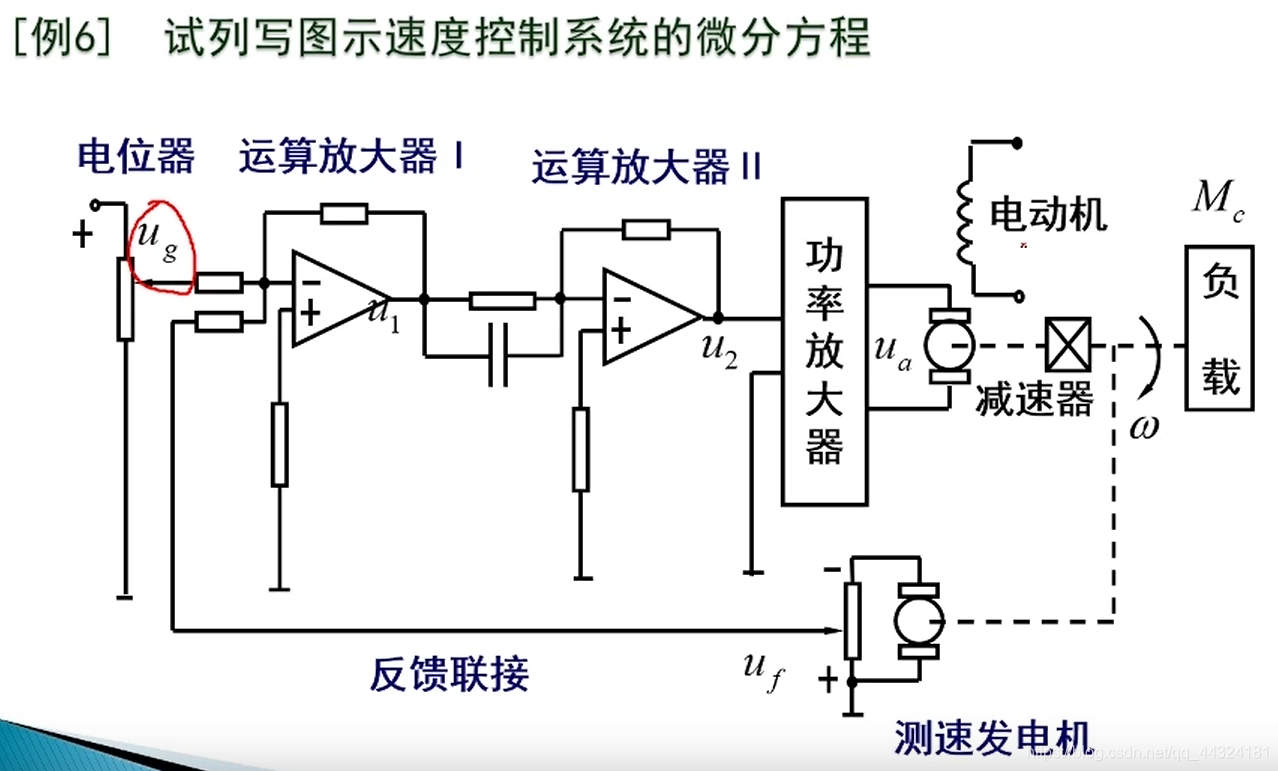
- 电位器——给定元件
- 运算放大器1——比较元件
- 运算放大器2——校正元件
- 功率放大器——放大元件+执行元件
- 测速发电机——测量元件
- 负载——干扰量,广义的输入量
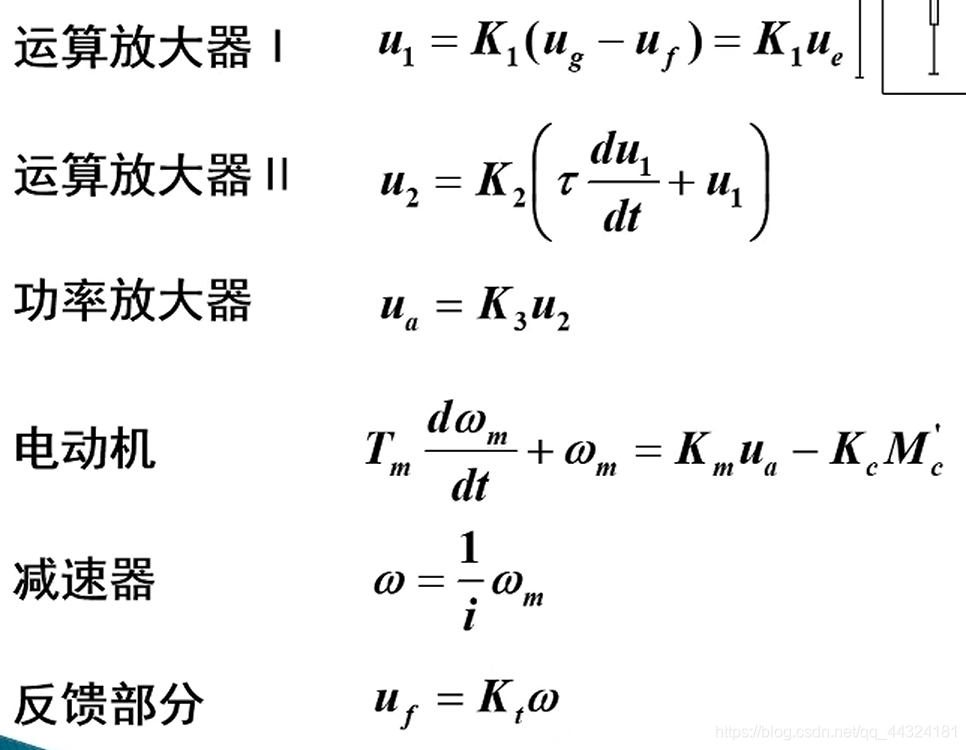
- 分析:

2.1.5 线性系统的基本特性
- 叠加性
- 齐次性/均匀性
- 规律:方程中只含有微分、积分和原函数的,一般是线性系统;若含有平方、立方或高次方,或者含有常数的,一般是非线性系统。
2.1.6 微分方程的求解
次部分为单独的视频,链接如下:
http://v.youku.com/v_show/id_XNDYwMTgzODc0MA==.html?x&sharefrom=android&sharekey=2ba89439df65e800d1b6de29ab262bde7
2.1.7 非线性微分方程的线性化
- 只能在某个点处(称为平衡点)进行线性化(在此处求导或泰勒展开舍去高次项);有些非线性环节(饱和特性、摩擦特性等,不能通过泰勒展开或求导进行线性化)
- 如果工作点偏离了平衡点,则线性化的结果就不适用。
下一篇:控制系统的结构图