【自控原理专栏】
A 时域数学模型
A.a 预备知识
(1)电容
ic(t)=Cdtduc(t)uc(t)=C1∫ic(t)dt
uc(0+)=uc(0−)
(2)电感
uL(t)=LdtdiL(t)iL(t)=L1∫uL(t)dt
iL(0+)=iL(0−)
(3)弹簧弹性量
F=kx=k∫vdtv=k1dtdF(k称为胡克系数)
(4)阻尼器(不储存能量,吸收能
→热能)
阻尼器,是以提供运动的阻力,耗减运动能量的装置。
- 平动阻尼器
F=kv=kdtdy
K:阻尼系数;F:阻尼力;y:位移。
- 旋转阻尼器
T=kw=kdtdθ
K:阻尼系数;w:旋转角速度;θ:旋转角度;T:阻尼力矩
(5)牛顿定律
F=mav=dtdxa=ctdv=dt2d2x
例子:

(6)电机

电枢电压:
ua(t)
电枢电流:
ia(t)
电磁转矩:
Mm(t)
电枢回路电压平衡方程(由KVL):
ua(t)=Ladtdia(t)+Raia(t)+Ea
反电势:
Ea(t)=Cewm(t),与
ua(t)反向。
能量损耗:等效成一个纯电阻
Ra
电机转矩系数
Cm
电磁转矩方程:
Mm(t)=Cmia(t)
电机和负载折合到电动机机轴上的两个变量:
- 粘性摩擦系数
fm
- 转动惯量
Jm

电动机轴上的转矩平衡方程:
Jmdtdwm(t)+fmwm(t)=Mm(t)−Mc(t)
电动机转速:
wm(t)
折合到电动机轴上的总负载转矩
Mc(t)
(7)机械齿轮
- 转速
w1,w2
- 齿数
z1,z2
- 半径
r1,r2
- 粘性摩擦系数
f1,f2
- 转动惯量
J1,J2
- 原动转矩
Mm
- 负载转矩
M1,M2,Mc

(8) 测速发电机
非电信号转化为电信号。
输入:
w
输出:
u
比例系数:
K
传递特性:
u=Kw
(9)运算放大器
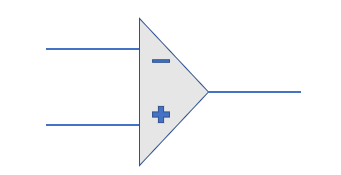
- 虚短(运算放大器里面短路):
u+=u−
- 虚断(运算放大器里面断开):
i+=i−=0
- 实际运放
- 理想运放
- 反向接法
- 同相接法
- 加法接法
- 减法接法
A.b 线性系统
重要特性:叠加原理。
线性系统满足:齐次性,也称为均匀性、叠加性。
数学模型:线性定常微分方程
a0dtndnc(t)+a1dtn−1dn−1c(t)+...+anc(t)=b0dtmdmr(t)+b1dtm−1dm−1r(t)+...+bmr(t)
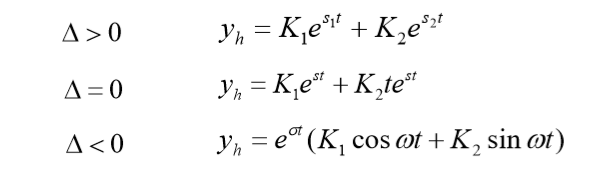
(1)微分方程求解(特征方程法)
dtndny↔sn

二阶齐次通解
(2)非线性模型的线性化
非线性元件
→线性元件
方法:切线法、小偏差法
切线法,泰勒级数展开:

小偏差法,二阶泰勒级数展开:

(3)运动的模态(微分方程解中包含哪些要素)
n阶微分方程,n个特征方程根:
无重根:
λ1,λ2,...,λn
模态(振型):
eλ1t,eλ2t,...,eλnt
多重根 :
λ
模态(振型):
teλt,t2eλt...
共轭复根:
λ=σ±jw
共轭复模态(振型)
e(σ+jw)te(σ−jw)t
实函数模态:
eσtsinwtc2eσtcoswt
齐次通解:
eσtsinwt+c2eσtcoswt
(4)拉普拉斯变换(详细见复变函数与积分变换):
时间域
→拉普拉斯变换
→复频域
F(s)=L[f(t)]=∫0∞f(t)e−stdt














