概述
本篇只要介绍这么使用STM32CubeMx工具添加RT-Thread操作系统组件,码代码的IDE是keil。介绍单线程SRAM静态内存使用。如果还不知道,这么使用STM32CubeMx工具添加RT-Thread操作系统组件,请移步到《基于 STM32CubeMX 添加 RT-Thread 操作系统组件(一)- 详细介绍操作步骤》文章阅读。好了,喝杯茶先^_^,继续前行。上一篇介绍关于《软件定时器》
一、STM32CubeMx配置

二、KEIL IDE
- 在Application/User文件夹,新建app_rt_thread.c文件,并添加如下代码:
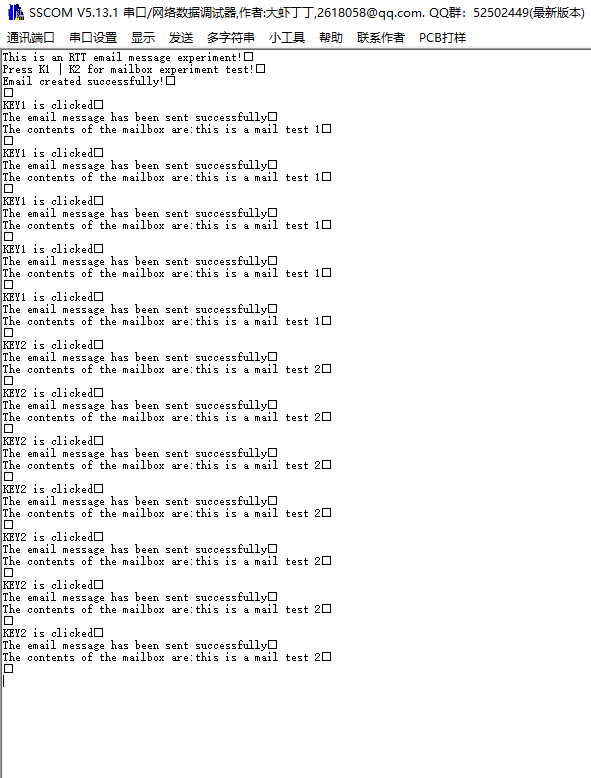
#include "rtthread.h" #include "main.h" #include "stdio.h" #include "usart.h" /* 定义线程控制块 */ static rt_thread_t receive_thread = RT_NULL; static rt_thread_t send_thread = RT_NULL; /* 定义邮箱控制块 */ static rt_mailbox_t test_mail = RT_NULL; /* 变量声明 */ char test_str1[] = "this is a mail test 1";/* 邮箱消息 test1 */ char test_str2[] = "this is a mail test 2";/* 邮箱消息 test2 */ /* 函数声明 */ static void receive_thread_entry(void* parameter); static void send_thread_entry(void* parameter); int MX_RT_Thread_Init(void) { rt_kprintf("This is an RTT email message experiment!\n"); rt_kprintf("Press K1 | K2 for mailbox experiment test!\n"); /* 创建一个邮箱 */ test_mail = rt_mb_create("test_mail", /* 邮箱名字 */ 10, /* 邮箱大小 */ RT_IPC_FLAG_FIFO);/* 信号量模式 FIFO(0x00)*/ if (test_mail != RT_NULL) rt_kprintf("Email created successfully!\n\n"); /* 线程控制块指针 */ receive_thread = rt_thread_create( "receive", /* 线程名字 */ receive_thread_entry, /* 线程入口函数 */ RT_NULL, /* 线程入口函数参数 */ 512, /* 线程栈大小 */ 3, /* 线程的优先级 */ 20); /* 线程时间片 */ /* 启动线程,开启调度 */ if (receive_thread != RT_NULL) rt_thread_startup(receive_thread); else return -1; /* 线程控制块指针 */ send_thread = rt_thread_create( "send", /* 线程名字 */ send_thread_entry, /* 线程入口函数 */ RT_NULL, /* 线程入口函数参数 */ 512, /* 线程栈大小 */ 2, /* 线程的优先级 */ 20); /* 线程时间片 */ /* 启动线程,开启调度 */ if (send_thread != RT_NULL) rt_thread_startup(send_thread); else return -1; } /* ************************************************************ * 线程定义 ********************************************************* */ static void receive_thread_entry(void* parameter) { rt_err_t uwRet = RT_EOK; char *r_str; /* 线程都是一个无限循环,不能返回 */ while (1) { /* 等待接邮箱消息 */ uwRet = rt_mb_recv(test_mail, /* 邮箱对象句柄 */ (rt_uint32_t*)&r_str, /* 接收邮箱消息 */ RT_WAITING_FOREVER);/* 指定超时事件,一直等 */ if (RT_EOK == uwRet) { /* 如果接收完成并且正确 */ rt_kprintf ( "The contents of the mailbox are:%s\n\n",r_str); HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);//LED1 反转 } else rt_kprintf ( "Error receiving email! Error code is 0x%x\n",uwRet); } } static void send_thread_entry(void* parameter) { rt_err_t uwRet = RT_EOK; /* 线程都是一个无限循环,不能返回 */ while (1) { //如果 KEY1 被单击 if ( HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin) == GPIO_PIN_SET ) { rt_kprintf ( "KEY1 is clicked\n" ); /* 发送一个邮箱消息 1 */ uwRet = rt_mb_send(test_mail,(rt_uint32_t)&test_str1); if (RT_EOK == uwRet) rt_kprintf ( "The email message has been sent successfully\n" ); else rt_kprintf ( "The mailbox message failed to send\n" ); } //如果 KEY2 被单击 if ( HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin) == GPIO_PIN_SET ) { rt_kprintf ( "KEY2 is clicked\n" ); /* 发送一个邮箱 2 */ uwRet = rt_mb_send(test_mail,(rt_uint32_t)&test_str2); if (RT_EOK == uwRet) rt_kprintf ( "The email message has been sent successfully\n" ); else rt_kprintf ( "The mailbox message failed to send\n" ); } rt_thread_delay(20); //每 20ms 扫描一次 } } - 在main.c文件添加如下代码:
/* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "usart.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ extern int MX_RT_Thread_Init(void); /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ MX_RT_Thread_Init(); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } - 自定义rt_hw_console_output()函数,在kservice.c文件添加中(重映射串口控制台到 rt_kprintf 函数)代码:
#include "usart.h" . . . RT_WEAK void rt_hw_console_output(const char *str) { /* empty console output */ /* 进入临界段 */ rt_enter_critical(); /* 直到字符串结束 */ while (*str!='\0') { /* 换行 */ if (*str=='\n') { HAL_UART_Transmit(&huart1,(uint8_t *)'\r',1,1000); } HAL_UART_Transmit(&huart1,(uint8_t *)(str++),1,1000); } /* 退出临界段 */ rt_exit_critical(); }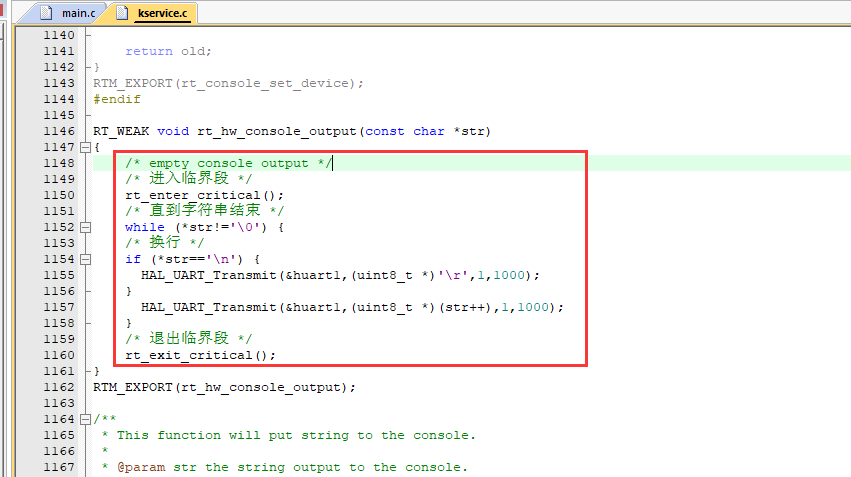
- 运行结果
源码:git