机器人仿真——Arbotix+rviz
目录
一、Arbotix介绍
- 一款控制电机、舵机的硬件控制板;
- 提供了相应的ROS功能包;
- 提供了一个差速控制器,通过接收速度控制指令,更新机器人的里程计状态。
二、Arbotix安装
指令
cd ~/catkin_ws/src
sudo git clone git://github.com/vanadiumlabs/arbotix_ros.git

回到工作空间编译
cd ~/catkin_ws
catkin_make
编译出现报错,如图

查询错误
/home/zxw/catkin_ws/src/learning_communication/src/listener.cpp:4:28: error: ‘std_mmsgs’ does not name a type void chatterCallback(const std_mmsgs::String::ConstPtr& msg)
错误:’ std_mmsgs '没有指定类型
const std_mmsgs::String:: consttr&msg不指定一个类型
根据错误提示进入该文件目录下修改

重新运行指令编译,查看结果
解决后就可以成功编译了。
其实我也不知道会多个m出来,一般报错都会有相应位置,对应报错信息去修改就可以了。
三、相应配置
配置launch-urdf文件
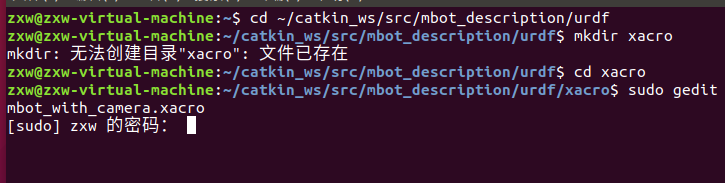
cd ~/catkin_ws/src/mbot_description/urdf
mkdir xacro
cd xacro
sudo gedit mbot_with_camera.xacro
将下列代码粘贴到文本
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_radius" value="0.015"/>
<xacro:property name="caster_joint_x" value="0.18"/>
<xacro:property name="camera_joint_x" value="0.17"/>
<xacro:property name="camera_joint_z" value="0.10"/>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="fixed">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
</link>
</xacro:macro>
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="fixed">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
</link>
</xacro:macro>
<xacro:macro name="camera" params="prefix reflect">
<joint name="camera_joint" type="fixed">
<origin xyz="${camera_joint_x} 0 ${camera_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
<link name="camera_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.03 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
</link>
</xacro:macro>
<!--定义主体base -->
<xacro:macro name="mbot_base">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
</link>
<wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/>
<caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/>
<camera/>
</xacro:macro>
</robot>
指令
sudo gedit mbot.xacro
同上
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/xacro/mbot_base.xacro" />
<mbot_base/>
</robot>
指令
cd ~/catkin_ws/src/mbot_description/launch/xacro
sudo gedit arbotix_mbot_with_camera_xacro.launch

同上
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/mbot.xacro'" />
<arg name="gui" default="false" />
<param name="robot_description" command="$(arg model)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find mbot_description)/config/fake_mbot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_arbotix.rviz" required="true" />
</launch>
配置控制器参数
cd ~/catkin_ws/src/mbot_description/config
sudo gedit fake_mbot_arbotix.yaml

文件内容
controllers: {
base_controller: {
type: diff_controller,
base_frame_id: base_footprint,
base_width: 0.26,
ticks_meter: 4100,
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
accel_limit: 1.0
}
}
四、仿真演示
启动仿真
roslaunch mbot_description arbotix_mbot_with_camera_xacro.launch
按图示设置


启动控制节点
roslaunch mbot_teleop mbot_teleop.launch
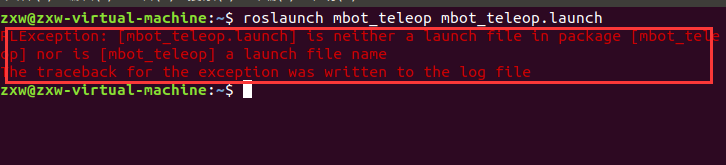
出现如示报错,解决方法如下
执行指令
export |grep ROS

下载对应的功能包
https://gitee.com/harrietlh/mbot_teleop/tree/master/mbot_teleop.
将下载的文件放到~ /catkin_ws/src目录下,在~/catkin_ws下执行catkin_make

- 没有安装对应的软件包看看你的src文件夹内是不是有对应的软件包
- 软件包名称输入错误输入软件包名称和launch文件名称时可以使用tab键自动补全。
- 环境变量设置有问题在执行roslaunch前是否执行了
source/opt/ros/kinetic/setup.bash(以kinetic版本为例)和source你的工作空间。如果是通过修改~/.bashrc文件的方式改变环境变量。对应的修改要重新开启一个命令行窗口后才会生效。可以通过roscd 你的包来测试一下环境变量是否有问题。如果正常,那么你应该能通过这种方式进入自己的软件包。 - 不是一个有效的ROS软件包比如自己写的一个ROS包,但是没有添加
CMakeLists.txt文件和package.xml文件
链接里面的网站还需要注册,挺麻烦的,这里有我弄好的,分享到网盘,有需要的可以自行下载
再次编译查看结果,指令如红色方框


错误就得到解决了。
演示效果

五、总结与参考资料
1、总结
arbotix是一个非常重要的入门级仿真模拟器,我们可以在arbotix上实现导航定位等的入门,在仿真环境实现基础功能。
2、参考资料
成功解决ROS报错RLException: [turtlebot3_fake.launch] is neither a launch file in package [turtlebot3_fake].
ArbotiX+rviz功能仿真.