一、rviz介绍
ROS有一个非常强大的图形化模拟环境rviz。在rviz中可以实现对建立地图以及导航路径等的动态观测,而且还可以建立模拟机器人仿真环境。
Rviz启动:
1.ctrl+Alt+T开启新终端
2.$roscore //rviz开启前要确保roscore开启
3.$rviz
4.点击rviz界面左上角,选取file-->openconfig,打开如下所示:

5.选取工作目录下allians_arbotix下文件夹rviz中的名为.rviz的配置文件,示例效果如下图:
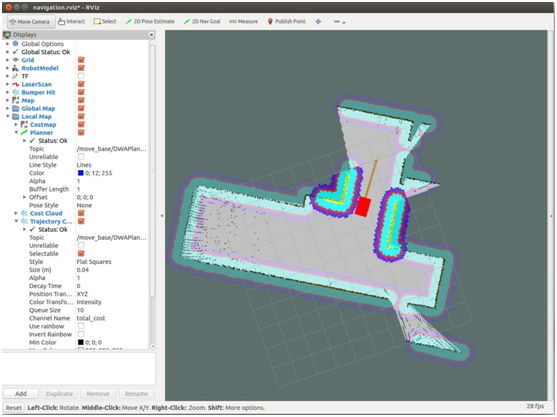
上侧工具栏中2D PoseEstimate 用于指定robot的初始位置,2D Goal用于指定导航目标点。
左侧工具栏显示的为图形界面的加载的部分可视化插件,点击左下角add可选取想要显示的功能。
二、仿真工具arbotix介绍
arbotix是一个基于ROS工具rviz的仿真模拟器。
arbotix安装:
1.sudo apt-getinstall ros-indigo-arbotix //此处我选择的为indigo版本,如使用kinetic等版本则替换indigo即可
2.建立工程,从联汇智造github克隆arbotix模拟程序:可参考上一篇(ROS—安装篇)
$git clone https://github.com/AlliansChina/allians_arbotix.git
allians_arbotix程序内容介绍:
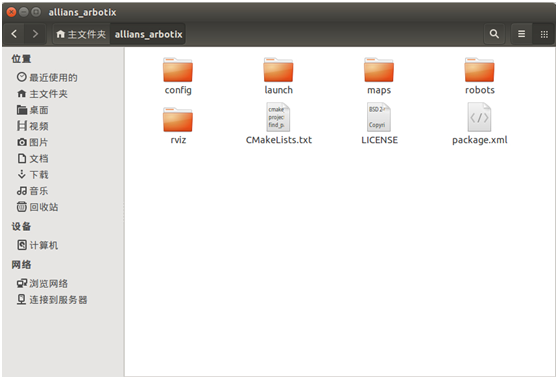
1.launch文件夹中两个文件:
display.launch—启动仿真机器人底盘
fake_mover.launch—启动机器人导航(navigation)
2.config文件夹中三个文件夹分别为:
arbotix—存有mover_arbotix.yaml为arbotix模拟器的配置文件。
controller—存有joint_state_controller.yaml,joint_state_controller属于controller_manager,联合robot_state_publisher,实现仿真模型上base_link到各个旋转关节的变换。
mover—存有robot的导航参数文件,具体配制在后续高级教程介绍。
3.map文件夹存放地图文件
4.robot文件夹存放机器人的urdf模型
5.rviz文件夹存放rviz图形界面配置文件
启动arbotix仿真机器人:
1.$roslaunchallians_arbotix display.launch
//启动成功如下:
startedroslaunch server http://192.168.1.167:40640/
SUMMARY
========
CLEAR PARAMETERS
* /arbotix/
//加载上述arbotix配置内容,参数可根据实际机器人修改
PARAMETERS
* /arbotix/baud: 115200
* /arbotix/controllers/base_controller/Kd: 0
* /arbotix/controllers/base_controller/Ki: 0
* /arbotix/controllers/base_controller/Ko: 0
* /arbotix/controllers/base_controller/Kp: 1
*/arbotix/controllers/base_controller/accel_limit: 1.0
*/arbotix/controllers/base_controller/base_frame_id: base_link
*/arbotix/controllers/base_controller/base_width: 0.29
*/arbotix/controllers/base_controller/ticks_meter: 22137
* /arbotix/controllers/base_controller/type:diff_controller
* /arbotix/port: /dev/ttyUSB0
* /arbotix/rate: 50
* /arbotix/read_rate: 20
* /arbotix/sim: True
* /arbotix/sync_read: True
* /arbotix/sync_write: True
* /arbotix/write_rate: 20
* /robot_description: <?xml version='1....
* /rosdistro: indigo
* /rosversion: 1.11.21
* /use_sim_time: False
NODES
/
arbotix (arbotix_python/arbotix_driver)
//加载轴关节变换joint_state_publisher
joint_state_publisher(joint_state_publisher/joint_state_publisher)
robot_state_publisher(robot_state_publisher/state_publisher)
ROS_MASTER_URI=http://192.168.1.167:11311
core service[/rosout] found
process[arbotix-1]:started with pid [29579]
process[robot_state_publisher-2]:started with pid [29580]
process[joint_state_publisher-3]:started with pid [29582]
[INFO][WallTime: 1526880914.670083] ArbotiX being simulated.
[INFO][WallTime: 1526880914.809997] Started DiffController (base_controller).Geometry: 0.29m wide, 22137.0 ticks/m.
2.启动rviz
$rviz
Openconfig选取rviz目录下robot.rviz则可以看到mover的仿真模型
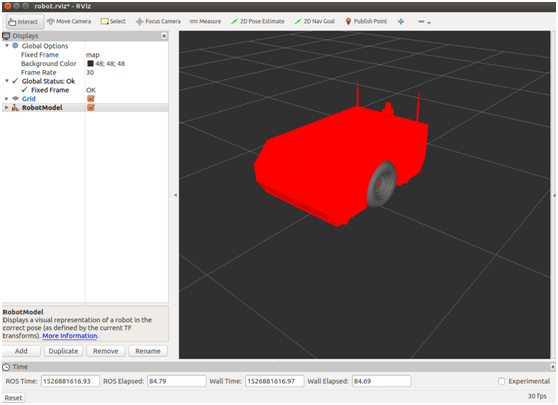
arbotix是一个非常重要的入门级仿真模拟器,我们可以在arbotix上实现导航定位等的入门,在仿真环境实现基础功能。
如何在arbotix让机器人动起来,请查看下一节。欢迎大家讨论。
点击查看更多>>www.allians.com.cn