版权声明:坚持原创,坚持深入原理,未经博主允许不得转载!! https://blog.csdn.net/lemon89/article/details/76212739
请先阅读ConcurrentHashMap1.7源码阅读,对JDK1.7(1.6中也基本一致)中的ConcurrentHashMap有个大致了解。
前言
本文通过阅读源码,借助debug方式对费解的地方尝试逐句分析.透彻的讲解1.8版本ConcurrentHashMap
我们阅读源码的思路是从一个使用样例入手,一步步debug去分析:
public class ConcurrentHashMapTest {
public static void main(String[] args) throws InterruptedException {
//阅读初始化源码
Map<String, String> cm = new ConcurrentHashMap<String, String>();
for (int i = 0; i < 10; i++) {
//阅读put操作源码
cm.put("key_" + i, "value_" + i);
}
for (int i = 0; i < 12; i++) {
//阅读get操作源码
System.out.println(cm.get("key_" + i));
}
//others operations ......
}
}初始化ConcurrentHashMap
重要成员变量:
/**
* 负数(hash buckets正在初始化或者重新扩容):
* -1:表示初始化;-|n|表示n-1个线程正在执行resize。
*
* 正数或0:
* 0:表示hash buckets表还没有被初始化;
* 正数:初始化hash buckets之前,表示hash buckets的数组size(capacity).
* 初始化之后,表示下一次扩容的阈值,
* 它的值始终是当前ConcurrentHashMap容量的0.75倍
* (使用位运算提高效率:n - (n >>> 2)==n*0.75),
* 这与loadfactor是对应的.
*
* 可以看到,与之前版本实现比较,一个volatile int sizeCtl变量充当了多种身份.
*/
private transient volatile int sizeCtl;
/**
* 数组桶.在第一次插入操作(即put)时候完成初始化(lazy init).
* 思考?这里volatile的意义是什么(volatile修饰一个数组声明):
* volatitle只能对数组的引用产生作用,而数组内的具体元素则没有
* volatile语义作用。所以这里只是保证table能指向最新的内存地址。
*
* 由于数组被volatile关键字修饰,因此不用担心数组的可见性问题。
* 同时每个元素是一个Node实例它的Key值和hash值都由final修饰,
* 不可变更,无须关心它们
* 被修改后的可见性问题。而其Value及对下一个元素的引用由volatile修饰,可见性也有保障
*/
transient volatile Node<K, V>[] table; /**
* @param initialCapacity 初始化的容量,通过位运算根据这个值计算出一个2的N次幂的值,来作为 hash buckets数组的size.
* 默认16
* @param loadFactor hash buckets的密度,根据这个值来确定是否需要扩容.默认0.75
* @param concurrencyLevel 并发更新线程的预估数量.默认1.
*/
public ConcurrentHashMap8(int initialCapacity, float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0.0f) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (initialCapacity < concurrencyLevel) // Use at least as many bins
initialCapacity = concurrencyLevel; // as estimated threads
long size = (long) (1.0 + (long) initialCapacity / loadFactor);
int cap = (size >= (long) MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : tableSizeFor((int) size);
this.sizeCtl = cap;//初始化为cap
} /**
* 根据预期的capacity参数,返回一个2的N次幂
*/
private static final int tableSizeFor(int c) {
int n = c - 1;
n |= n >>> 1;
n |= n >>> 2;
n |= n >>> 4;
n |= n >>> 8;
n |= n >>> 16;
return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;
}关于这个talbeSizeFor(int c)所用的算法,详情参考:
tableSizeFor取数算法
ConcurrentHashMap底层数据结构
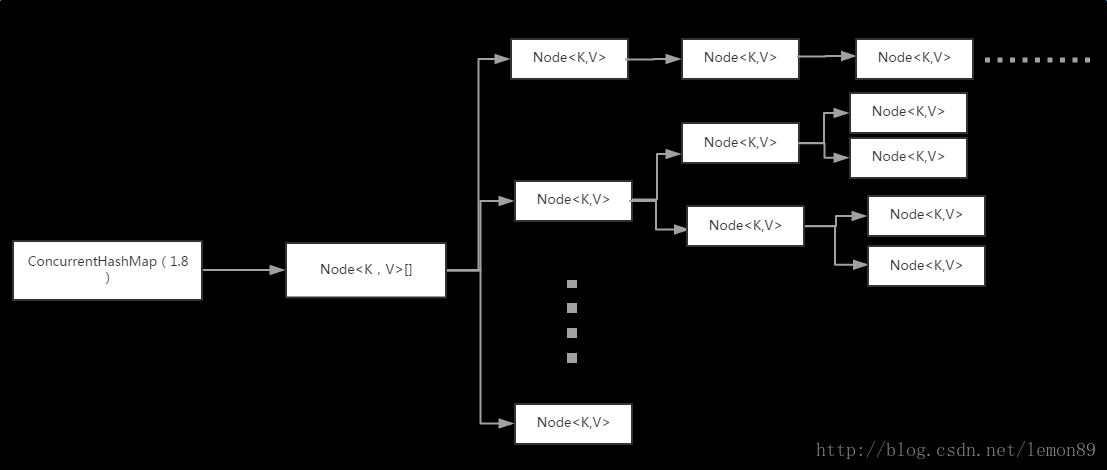
ConcurrentHashMap通过组合一个 Node<K, V>[] table数组+Node单向链表,来作为底层数据储存的结构。
static class Node<K, V> implements Map.Entry<K, V> {
final int hash;//key的hashcode执行了hash函数后的值
final K key;
volatile V val;//volatile保证其可见性,下同
volatile Node<K, V> next;
Node(int hash, K key, V val, Node<K, V> next) {
this.hash = hash;
this.key = key;
this.val = val;
this.next = next;
}
....Put
与HashMap不同(允许key、value为null),ConcurrentHashMap中key、value都不允许为null,否则会报NPE。
put
public V put(K key, V value) {
return putVal(key, value, false);
}putVal
// onlyIfAbsent默认为false,允许key相同的value被覆盖
final V putVal(K key, V value, boolean onlyIfAbsent) {
if (key == null || value == null)
throw new NullPointerException();
// hash=(h ^(h >>>16))& HASH_BITS:移位运算使高位参与运算,尽可能分布以便减少哈希冲突
//这个int hash将作为key对应的结点Node中的成员变量hash使用
int hash = spread(key.hashCode());
int binCount = 0;
for (Node<K, V>[] tab = table;;) {
Node<K, V> f;
int n, i, fh;
if (tab == null || (n = tab.length) == 0)
tab = initTable();//1.数组桶初始化(延迟初始化hash桶,第一次put操作),并计算下一次rehash的阈值
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {//i = (n -1) & hash:hash数组桶的index,非常类似hashMap的key计算方法
//2.如果这个key对应的数组f位置没有元素,则CAS初始化这个f数组元素(单向链表Node对象)
if (casTabAt(tab, i, null, new Node<K, V>(hash, key, value, null)))
break;
} else if ((fh = f.hash) == MOVED)//3.f结点已经转换为ForwardingNode,表示有其他线程正在扩容
tab = helpTransfer(tab, f);
else {
V oldVal = null;
synchronized (f) {//4.锁住链表f(或者红黑树)
if (tabAt(tab, i) == f) {//再次判断,如果失败则释放锁
if (fh >= 0) {
binCount = 1;//记录当前数组桶中的链表Node个数.
//5.遍历链表,新增或者覆盖
for (Node<K, V> e = f;; ++binCount) {
K ek;
//5.1:查找是否有重复的key,尝试覆盖(默认覆盖)
if (e.hash == hash && ((ek = e.key) == key || (ek != null && key.equals(ek)))) {//当前节点,key.hash&&key匹配
oldVal = e.val;//记录原有value
if (!onlyIfAbsent)//是否允许覆盖 默认允许
e.val = value;//覆盖
break;
}
//5.2:链表末端上新增一个结点
Node<K, V> pred = e;
if ((e = e.next) == null) {//移动到下个结点,直到尾部
pred.next = new Node<K, V>(hash, key, value, null);//为null表示到达链表尾部,此时在尾部插入新的结点。否则继续遍历这个链表
break;
}
}
} else if (f instanceof TreeBin) {//6.红黑树则使用红黑树插入
Node<K, V> p;
binCount = 2;
if ((p = ((TreeBin<K, V>) f).putTreeVal(hash, key, value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
//7.通过binCount判断链表上结点个数,是否需要链表转红黑树
if (binCount != 0) {
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;//当同一个key覆盖value的情况下,直接返回oldVal,无需执行后续计数代码
break;
}
}
}
addCount(1L, binCount);//8
return null;
}接着对put方法中用到的几个方法做进一步解析:
initTable
/**
* 1.初始化数组桶
* 2.确认下次扩容阈值(sizeCtl使用CAS设置)
*/
private final Node<K, V>[] initTable() {
Node<K, V>[] tab;
int sc;
while ((tab = table) == null || tab.length == 0) {
if ((sc = sizeCtl) < 0)//当sizeCtl<0表示当前对象正在初始化,尝试yield cpu时间以避免不必要的竞争
Thread.yield(); // lost initialization race; just spin
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {// CAS设置为-1表示正在初始化
try {
if ((tab = table) == null || tab.length == 0) {//再次判断
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;//设置初始数组桶的size.默认数组个数16
@SuppressWarnings("unchecked")
Node<K, V>[] nt = (Node<K, V>[]) new Node<?, ?>[n];// 数组桶生成
table = tab = nt;
sc = n - (n >>> 2);//计算下一次扩容阈值,等价于sc=n*0.75
}
} finally {
sizeCtl = sc;// resize 阈值
}
break;
}
}
return tab;
}addCount
private final void addCount(long x, int check) {//put方法调用:x默认为1;binCount表示链表遍历的当前个数
CounterCell[] as;
long b, s;
if ((as = counterCells) != null || !U.compareAndSwapLong(this, BASECOUNT, b = baseCount, s = b + x)) {//当前k\v元素总数,加1
CounterCell a;
long v;
int m;
boolean uncontended = true;//默认假设不存在竞争
if (as == null || (m = as.length - 1) < 0 || (a = as[ThreadLocalRandom.getProbe() & m]) == null
|| !(uncontended = U.compareAndSwapLong(a, CELLVALUE, v = a.value, v + x))) {
fullAddCount(x, uncontended);
return;
}
if (check <= 1)
return;
s = sumCount();
}
if (check >= 0) {//下边这段逻辑,会在数量达到阈值时做resize:
Node<K, V>[] tab, nt;
int n, sc;
//当前总数(+1后)>=阈值(sc) && table数组不为null && 数组个数不超标
while (s >= (long) (sc = sizeCtl) && (tab = table) != null && (n = tab.length) < MAXIMUM_CAPACITY) {
int rs = resizeStamp(n);
if (sc < 0) {//-1:表示初始化;-|n|表示n-1个线程正在执行resize.
if ((sc >>> RESIZE_STAMP_SHIFT) != rs || sc == rs + 1 || sc == rs + MAX_RESIZERS
|| (nt = nextTable) == null || transferIndex <= 0)
break;
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1))
transfer(tab, nt);
} else if (U.compareAndSwapInt(this, SIZECTL, sc, (rs << RESIZE_STAMP_SHIFT) + 2))//将sizectl设置为一个很大的负数,然后进行transfer扩容,结束transfer后设置为下一次扩容的阈值
transfer(tab, null);//首次执行
s = sumCount();
}
}
}待续