Ref:Enhanced Differential GPS Carrier-Smoothed Code Processing Using Dual-Frequency Measurements,1998.
闲话少说,先上模型。
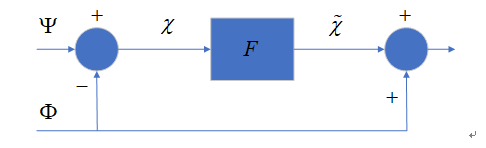
上面是伪距,下面是载波,F是滤波器,滤波器的拉普拉斯变换为:

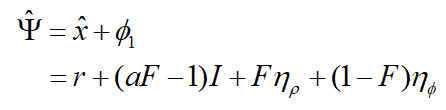
平滑得到的量可以表示如下:
分析一下为什么要这么设计,我们通常情况下定位需要得到用于定位的数据,伪距的精度差,载波精度高,但是载波受到模糊度固定的影响,但是模糊度不发生周跳的情况下通常是个定值。我们要求用于定位的数据要求精度越高越好,而这种滤波方式可以得到精度相对媲美于载波相位,但是不需要固定模糊度的综合结果。其实也就是相位平滑伪距的一种方式而已。
我们看到这个数据首先计算了码载波偏差,这里的码载波偏差再没有周跳的情况下,我们认为其是两个随机误差的综合,因为伪距的噪声很大,我们用了滤波器滤除了高阶噪声,得到了平滑的趋势项。也就是说比如N(3,2)的噪声,滤波之后,变成了3的水平线。这样算出了较为精确的码载波偏差值,把这个量还给随机误差小的载波相位观测值,得到了距离等级和伪距相同的数据,但是精度接近于载波,从而不受到随机噪声的影响。
但是,还有几个问题。
1. Bias作为固定偏差,滤波之后会作为常量被保留,其中相位硬件延迟和最后的载波值相加后抵消,而伪距的硬件延迟,保留在了平滑结果中,带来了一定的固定偏差。
2. 相位硬件缠绕需要具体分析。
3. 这种方式的前提在于不发生周跳,周跳发生后,由于滤波器设计上的时延特性,会带来不利影响。
4. 这种情况下的随机偏差是用伪距中和了载波,等于噪声实际上是放大的。
5. 电离层梯度下的的影响视电离层梯度的大小而定。