CAN(控制器局域网)总线是一种现场总线,最早是由博世公司开发的,主要应用在工业控制和汽车电控领域,通用的技术标准有CAN2.0B ,ISO11898等。本博文主要针对汽车电控应用方面阐述一些技术应用要点,对相关规范不做详细描述。
CAN节点及拓扑结构
主节点:对整个网络行为进行主控的节点,一个网络中只能有一个。
15节点:CAN通讯只在+15线上电的时候工作的节点。
30节点:CAN通讯在+30线上电的时候就可工作,能唤醒总线并且也能被总线唤醒的节点。
终端电阻类型
在CAN网络中,都应在干线的两端安装终端电阻,这类终端电阻称为干线终端电阻,一般值为120欧姆。如果某ECU通过一段比较长的支线接入网段,为了防止信号反射,在收发器的驱动能力足够的前提下,可以在该ECU内部安装分裂式终端电阻,这类终端电阻称为支线终端电阻,一般值为1200欧姆。
节点数量
HS-CAN(500kbps)节点数量:2~16个
MS-CAN(125kbps)节点数量:2~32个
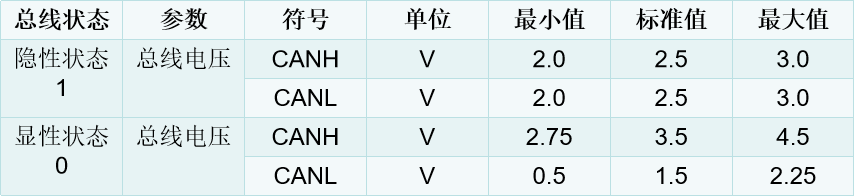
总线电压
上升沿与下降沿时间
图为计算上升沿和下降沿时间的方法。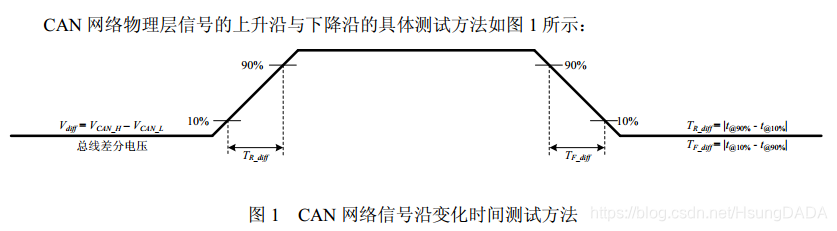
位定时参数:一般通信速率为 500Kbps

采样点位置:大部分81.25%

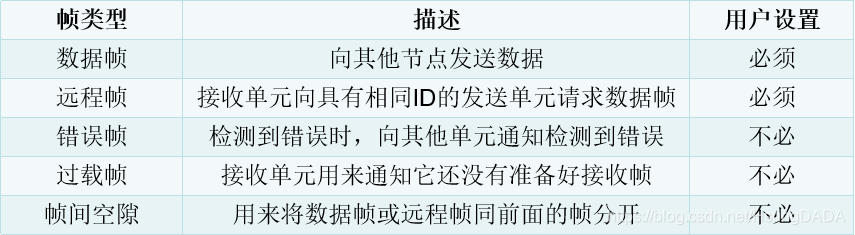
帧类型
数据帧、远程帧、错误帧、过载帧、帧间空隙
对于用户来说只有数据帧、远程帧可设置,其他由硬件设置实现。
数据帧有两种帧格式:标准帧、扩展帧。一般采用标准帧格式。

SOF:一个显性位,标识一个数据帧的开始,用于同步
ID:唯一确定一条报文,ID值越小,优先级约高,标准真 11位,扩展帧29位
RTR:用于区分数据帧和远程帧,RTR=0为数据帧
IDE:用于区分标准帧和扩展帧,标准帧 IDE=0(11位ID)
R:保留位,置0
DLC:4bit,标识数据场包含数据的字节数,DLC最大为8
数据场:0-8个字节长度,由DLC决定
CRC:用于CRC校验
DEL:CRC界定符,1个隐性位
ACK:确定报文被至少一个节点正确接收,发送节点在ACK发送隐性,正确接收到报文用显性覆盖
EOF:表示数据帧结束,7个连续的隐性位
通信矩阵
信号格式一般采用Motorola LSB
字节顺序按Motorola格式,信号的起始位从最低有效字节的最低有效位开始。如图代表起始位bit28,长度10的信号Signal_Alert
节点超时监测
各节点应该对所需要的关键报文做监测,超时时间一般为10个Cycle,监测到超时后应记录相关故障码并存储。
报文内容错误处理
对一些信息,若报文内有效位为无效或内容超出有效范围一定时间可做相关处理。
报文计数或校验和错误处理
主要是验证报文数据内容的正确性,一般情况下不做监测。
BusOff处理

A.进入BusOff后,立即重新进行初始化
B.T时间内暂停发送,分为快恢复和慢恢复
C.若BusOff消失,则恢复通讯
