文章主要内容总结
本文提出了一种名为LLM+MAP的双手机器人任务规划框架,结合大语言模型(LLM)和符号规划技术(PDDL),解决双手机器人在复杂长时任务中的时空协调难题。框架通过以下步骤实现高效规划:
- 场景理解:利用视觉模型定位物体并划分操作区域(左/右/中间协作区)。
- PDDL生成:通过LLM将自然语言任务描述和场景信息转化为PDDL格式,定义初始状态和目标状态。
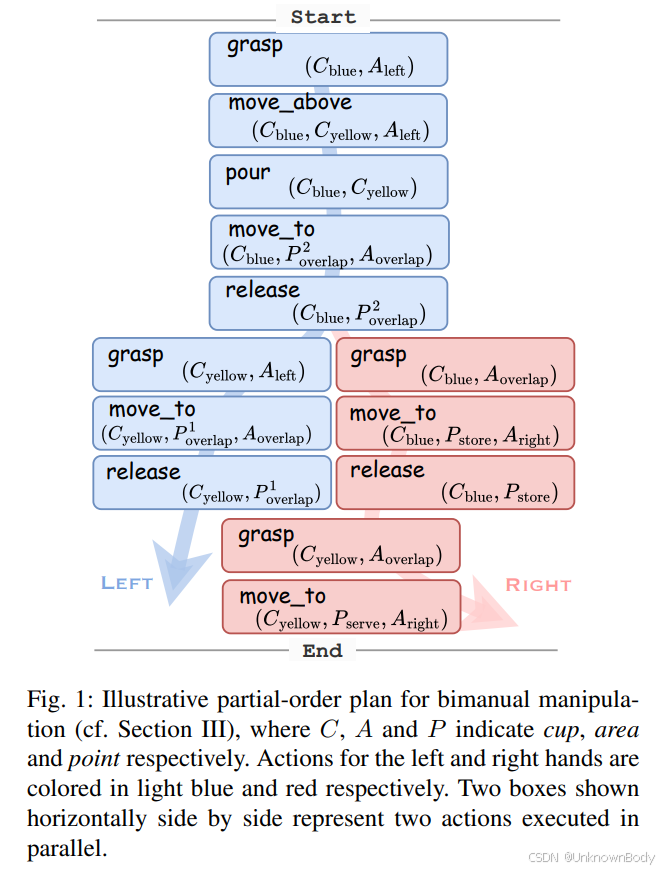
- 多智能体规划:使用FMAP符号规划器生成部分有序计划(partial-order plan),确保双手动作的逻辑正确性和并行执行效率。
实验在NICOL双手机器人平台上进行,涵盖三种任务场景(ServeWater、ServeFruit、StackBlock)。结果表明,LLM+MAP在规划时间、成功率和步骤效率上显著优于直接使用LLM(如GPT-4o、o1、R1)生成计划的方法。