锁相环概念
其他
2020-06-19 11:24:52
阅读次数: 0
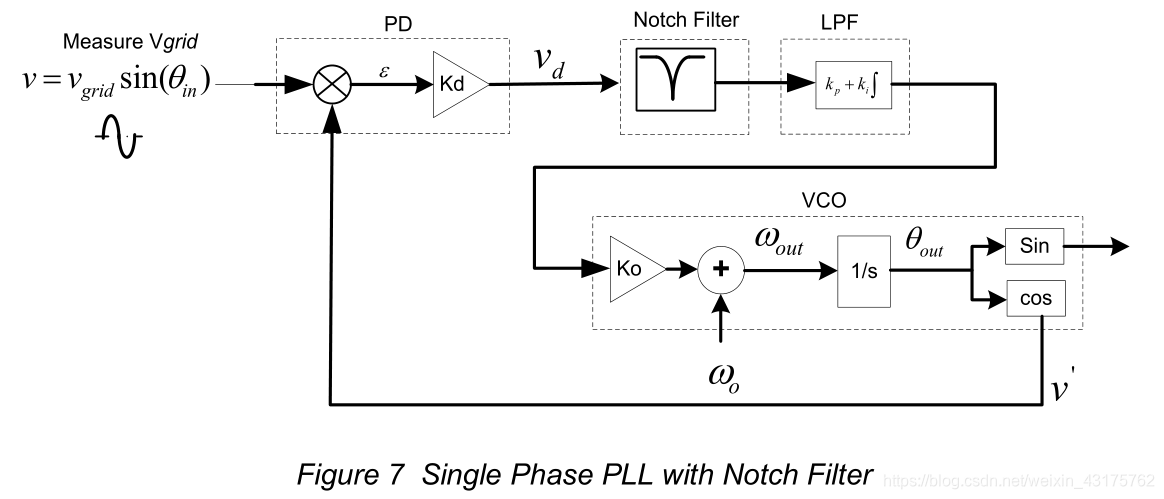
- Notch Filter based PLL

- Closed Loop Phase TF
-
Ho(s)=θin(s)θout(s)=s+LF(s)LF(s)=s2+vgridKps+vgridTiKpvgrid(Kps+TiKp)
- Compaing with the generic second order system transfer function, we can get the natural frequency and the damping ration of the linearalized PLL
-
H(s)=s2+2ζwns+wn22ζwns+wn2
-
wn=TivgridKp
,
ζ=4vgridKpTi
- low grid frequency (50Hz) make it hard to design PI, therefore,
notch filter is added
- Design PI coefficients
- for a general second order system, the step response:
-
H(s)=s2+2ζwns+wn22ζwns+wn2
-
y(t)=1−ce−σtsin(wd+ϕ) where
-
σ=ζwn and
c=wdwn and
wd=1−ζ2
wn
- for an error band
δ,
1−δ=1−ce−σts→ts=σ1⋅ln(σc) , where
ts is the settling time that the system needs to attain error within
δ
- solve equations and obtain
wn
- use
Kp=2wnζ and
Ki=wn2, obtain appropriate PI controller values
- Use
Bi-linear transformation and obtain the difference equations
转载自blog.csdn.net/weixin_43175762/article/details/104418319