Part1
练习3
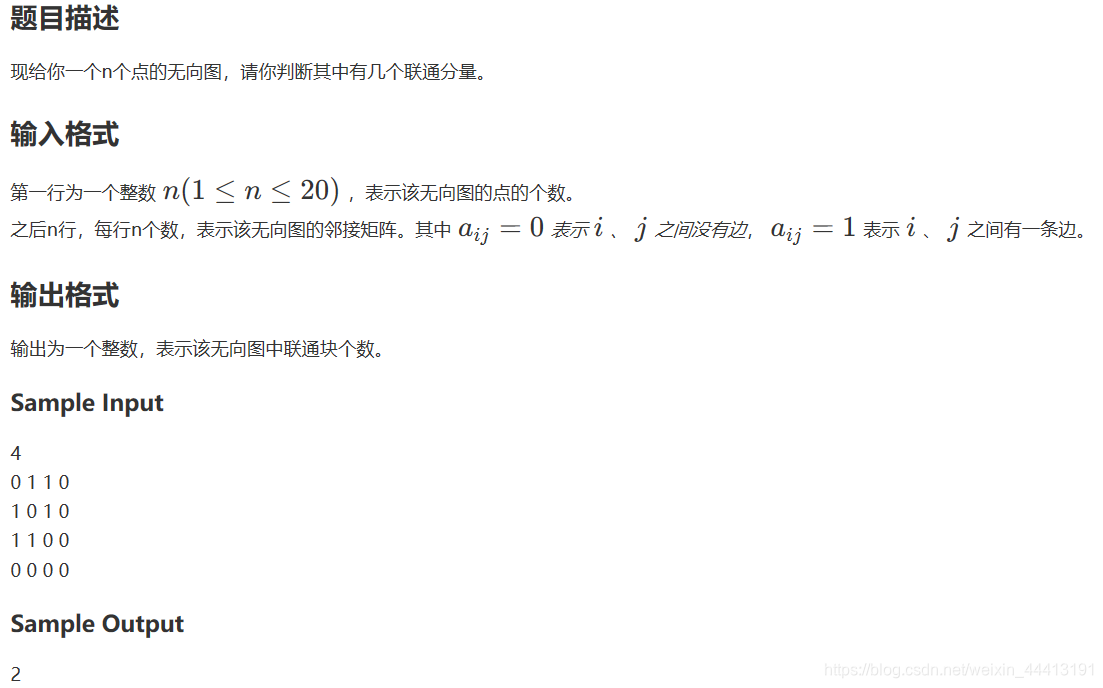
思路:利用栈进行遍历访问,若栈空则形成一个连通子图
非递归遍历算法思想:
(1)访问一个顶点,记录被访问;其所有未被访问的邻接顶点入栈
(2)若栈空,退出;否则,栈中一顶点出栈
(3)若顶点已被访问,则转(2);否则,转(1)
#include<bits/stdc++.h>
using namespace std;
const int MAX_N = 110;
stack<int>s;
struct Mgraph {
int map[MAX_N][MAX_N];
int vexnum;
}G;
int visited[MAX_N];
int main()
{
cin >>G.vexnum;
int i, j, v;
for (i = 1; i <= G.vexnum; i++)
for (j = 1; j <= G.vexnum; j++)
cin >> G.map[i][j];
int cnt = 0, find = 0;
for (int i = 1; i <= G.vexnum; i++)
if (visited[i] == 0) {//若该顶点没被访问
v = i;
while (1) {
find = 0;
visited[v] = 1;//标记一顶点
for (j = 1; j <= G.vexnum; j++) //所有未标记的邻接顶点入栈
if (G.map[v][j] == 1 && visited[j] == 0)
s.push(j);
do {
if (s.empty()) {//如果栈空则退出
cnt++; find = 1; break;
}
v = s.top(); s.pop();//否则栈中一顶点出栈
} while (visited[v] == 1);//如果顶点未被访问过,退出循环,访问这个顶点
}
if (find == 1)break;//退出外层循环
}
cout << cnt;
return 0;
}
递归:
#include <bits/stdc++.h>
using namespace std;
const int MAX_N = 110;
struct MGraph {
int map[MAX_N][MAX_N];
int vexnum;
}G;
int visited[MAX_N];
void DFS(int v){//遍历一个连通图
visited[v] = 1;
for (int j = 1; j <= G.vexnum; j++)
if (G.map[v][j] && !visited[j])
DFS(j);
}
int main()
{
cin >> G.vexnum;
for (int i = 1; i <= G.vexnum; i++)
for (int j = 1; j <= G.vexnum; j++)
cin >> G.map[i][j];
int cnt = 0;
for (int i = 1; i <= G.vexnum; i++)//遍历图中所有连通子图
if (!visited[i]){
DFS(i);//遍历一个连通子图
cnt++;//得到一个连通子图
}
cout << cnt;
return 0;
}
Part2
练习1
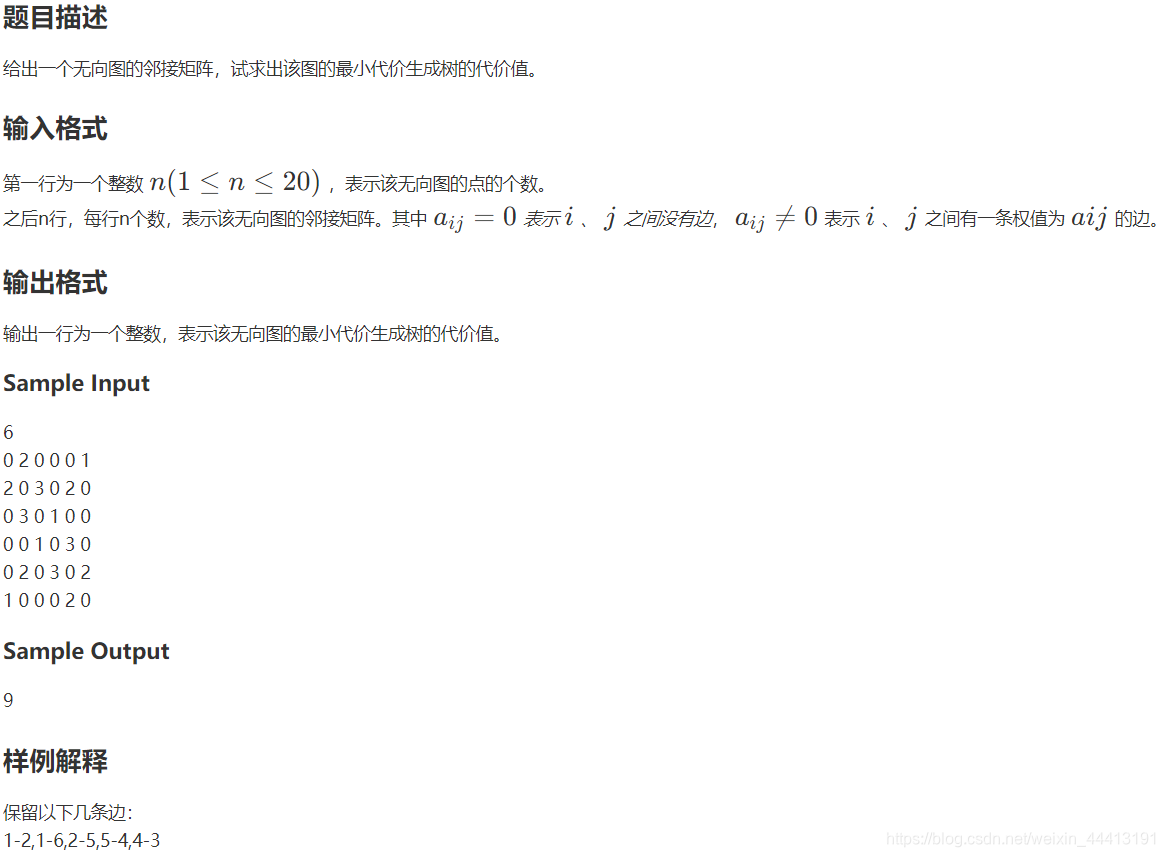
思路:利用普利姆算法。
普利姆算法:从U={u0}, TE={}开始,在所有u∈U, v∈V-U的边(u,v)∈E中找到一条代价最小的边(u0,v0)并入集合TE,同时v0并入U,直至U=V为止
#include<bits/stdc++.h>
using namespace std;
const int MAX_N = 100;
const int MAX_NUM = 10000;
struct Graph {//邻接矩阵
int GMap[MAX_N][MAX_N];
int vexnum;
}G;
vector<int>u;//存放U中顶点
int main()
{
cin >> G.vexnum;
int i, j;
for (i = 1; i <= G.vexnum; i++)
for (j = 1; j <= G.vexnum; j++)
cin >> G.GMap[i][j];
int min, sign, sum = 0;
u.push_back(0); u.push_back(1);//顶点1进U
while (u.size() <= G.vexnum) {
min = MAX_NUM;
for (i = 1; i < u.size(); i++)
for (j = 1; j <= G.vexnum; j++)
if (G.GMap[u[i]][j]!=0&&G.GMap[u[i]][j] < min) {
min = G.GMap[u[i]][j]; sign = j;
}
G.GMap[--i][sign] = 0; G.GMap[sign][i] = 0;//将遍历过的图置0,防止重复遍历
sum += min;
u.push_back(sign);//将顶点入U
}
cout << sum;
return 0;
}
练习2

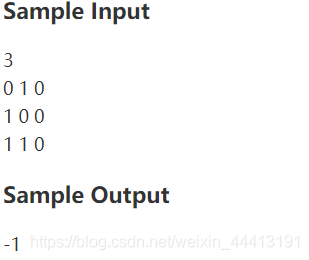
思路:利用迪杰斯特拉算法求源点到其余各点的最短路径
迪杰斯特拉算法:按路径长度递增的次序产生你最短路径。下一条最短路径或者是弧(v,x),或者是中间只经过S中的顶点而最后到达顶点x的路径。
#include<bits/stdc++.h>
using namespace std;
const int MAX_N = 25;
const int MAX_NUM = 10000;
struct Graph {//邻接矩阵
int GMap[MAX_N][MAX_N];
int vexnum;
}G;
int final[MAX_N],D[MAX_N];//final[i]为1,i顶点在S中
int main()
{
cin >> G.vexnum;
int i, j;
for (i = 1; i <= G.vexnum; i++)
for (j = 1; j <= G.vexnum; j++)
cin >> G.GMap[i][j];
for (i = 1; i <= G.vexnum; i++)
for (j = 1; j <= G.vexnum; j++)
if (j != i && G.GMap[i][j] == 0)
G.GMap[i][j] = MAX_NUM;//设没有路径的两顶点间距离为MAX_NUM
final[1] = 1;//第一个顶点入S
for (i = 2; i <= G.vexnum; i++) {//初始化D数组
D[i] = G.GMap[1][i];
int min,v;
for (i = 2; i <= G.vexnum; i++) {//其余n-1个顶点
min = MAX_NUM;//当前所知离v1最近的距离
for(j=1;j<=G.vexnum;j++)//得到从1出发的最短路径的终点v
if (!final[j]&& D[j] < min){
min = D[j];v = j;
}
final[v] = 1;//顶点v入S
for(j=1;j<=G.vexnum;j++)//修改从v出发到集合V-S上任一顶点vk可达最短路径长度
if (!final[j] && min + G.GMap[v][j] < D[j])
D[j] = min + G.GMap[v][j];
}
if (D[G.vexnum] == MAX_NUM)cout << -1;//没有路径
else cout << D[G.vexnum];
return 0;
}
佛洛依德算法(每一对顶点之间的最短路径):
d[N][N]为带权路径长,p[N][N][N],若p[i][j][k]=1,则k是从i到j求得的最短路径上的顶点
int d[N][N], p[N][N][N];//数据过大时,可把三维数组改为结构体数组
void floyd() {
int i, j, k, t;
for(i=1;i<=G.vexnum;i++)//各对顶点之间初始已知路径及距离
for (j = 1; j <= G.vexnum; j++) {
d[i][j] = G.map[i][j];
if (d[i][j] < N) {//从i到j有直接路径
p[i][j][i] = 1; p[i][j][j] = 1;
}
}
for(k=1;k<=G.vexnum;k++)
for(i=1;i<=G.vexnum;i++)
for(j=1;j<=G.vexnum;j++)
if (d[i][k] + d[k][j] < d[i][j]) {//从i经k到j的一条路径更短
d[i][j] = d[i][k] + d[k][j];
for (t = 1; t <= G.vexnum; t++)//更新路径
p[i][j][t] = p[i][k][t] || p[k][j][t];
}
}
练习3
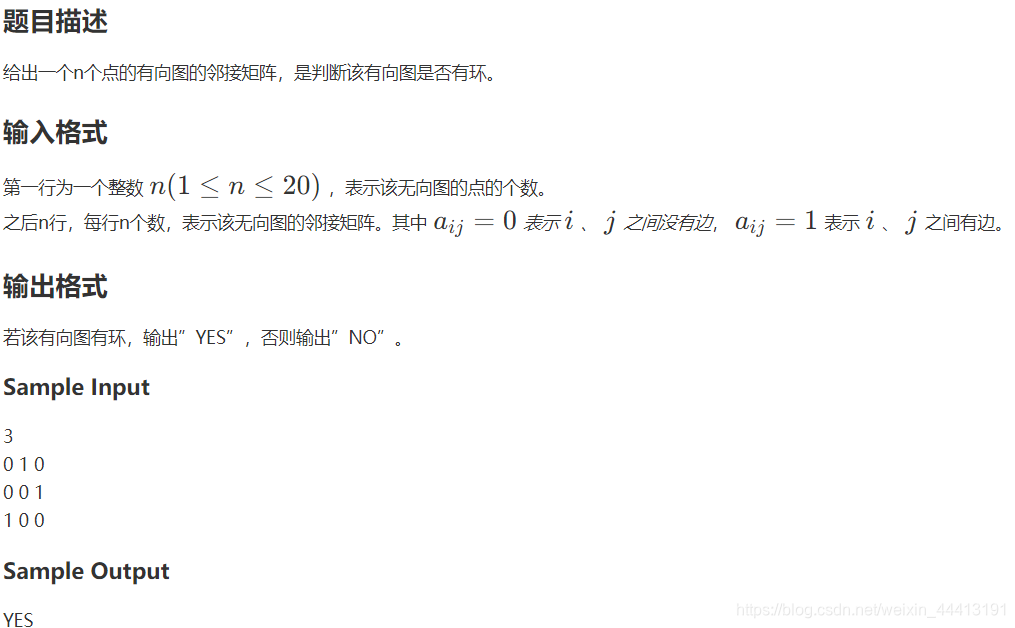
思路:利用拓扑排序,如果排序序列中数字个数小于n,则有环
拓扑排序:
(1)在有向图中选一个没有前驱的顶点输出
(2)从图中删除该顶点和所有以它为尾的弧
#include<bits/stdc++.h>
using namespace std;
const int MAX_N = 25;
typedef long long ll;
struct Graph {//邻接矩阵
int GMap[MAX_N][MAX_N];
int vexnum;
}G;
stack<int>s;//存储入度为0的顶点
int degree[MAX_N];
int main()
{
cin >> G.vexnum;
int i, j;
for (i = 1; i <= G.vexnum; i++)
for (j = 1; j <= G.vexnum; j++)
cin >> G.GMap[i][j];
for (i = 1; i <= G.vexnum; i++) //逐列计算各顶点入度
for (j = 1; j <= G.vexnum; j++)
if (G.GMap[j][i] == 1)
degree[i]++;
for (i = 1; i <= G.vexnum; i++)//入度为0的顶点入栈
if (degree[i] == 0)
s.push(i);
int cnt = 0;//对已排序顶点计数
while (!s.empty()) {
i = s.top(); s.pop(); cnt++;//顶点出栈
for (j = 1; j <= G.vexnum; j++) {
if (i == j)continue;
if (G.GMap[i][j] == 1) {//i号顶点的每个邻接顶点入度-1
degree[j]--;
if (degree[j] == 0)s.push(j);//入度为0入栈}
}
}
}
if (cnt < G.vexnum)cout << "YES";
else cout << "NO";
return 0;
}
拓扑排序(关键路径中的):用栈t逆序存放拓扑序列
void topological_order() {
int j;
for (int i = 1; i <= G.vexnum; i++)
for (int j = 1; j <= G.vexnum; j++)
if (G.map[j][i])
indegree[i]++;
for (int i = 1; i <= G.vexnum; i++)
if (!indegree[i])
s.push(i);
int cnt = 0,dut;
while (!s.empty()) {
j = s.top(); s.pop(); t.push(j); cnt++;
for(int k=1;k<=G.vexnum;k++)
if (G.map[j][k]) {
indegree[k]--;
if (!indegree[k])s.push(k);
dut = G.map[j][k];
if (ve[j] + dut > ve[k])//ve[k]=max{ve[j]+dut}
ve[k] = ve[j] + dut;
}
}
}
关键路径:
void critical_path() {
topological_order();
int j,k,dut;
memset(vl, ve[G.vexnum], sizeof(int));
while (!t.empty()) {
j = t.top(); t.pop();
for(k=1;k<=G.vexnum;k++)
if (G.map[j][k]) {
dut = G.map[j][k];
if (vl[k] - dut < vl[j])//vl[j]=min{vl[k]-dut}
vl[j] = vl[k] - dut;
}
}
int ee, el;
for(j=1;j<=G.vexnum;j++)
for(k=1;k<=G.vexnum;k++)
if (G.map[j][k]) {
dut = G.map[j][k];
ee = ve[j]; el = vl[k] - dut;//计算关键路径
if (ee == el)cout << j << ' ' << k << endl;
}
}
