系列文章目录
前言
本示例介绍了一种设计抓取和轨迹规划器的方法,该规划器可用于垃圾箱拣选系统。
在机器人技术中,垃圾箱拣选包括使用机械手从垃圾箱中取出物品。智能垃圾箱拣选是这一过程的高级版本,具有更强的自主性。使用摄像系统感知部件,规划器生成与场景相适应的无碰撞轨迹。
本示例展示了如何创建一个轨迹规划器组件,该组件将与料箱拣选系统配合使用。该组件作为独立模型存储,可作为线束中的引用模型调用。该示例还使用了一个简单的测试线束来验证规划器的行为。
一、查看模型
打开包含规划器模型的测试
open_system('TrajectoryPlanning_Harness')
open_system('TrajectoryPlanning_Harness/Planner Subsystem')线束,并导航到规划器子系统以检查其内容。
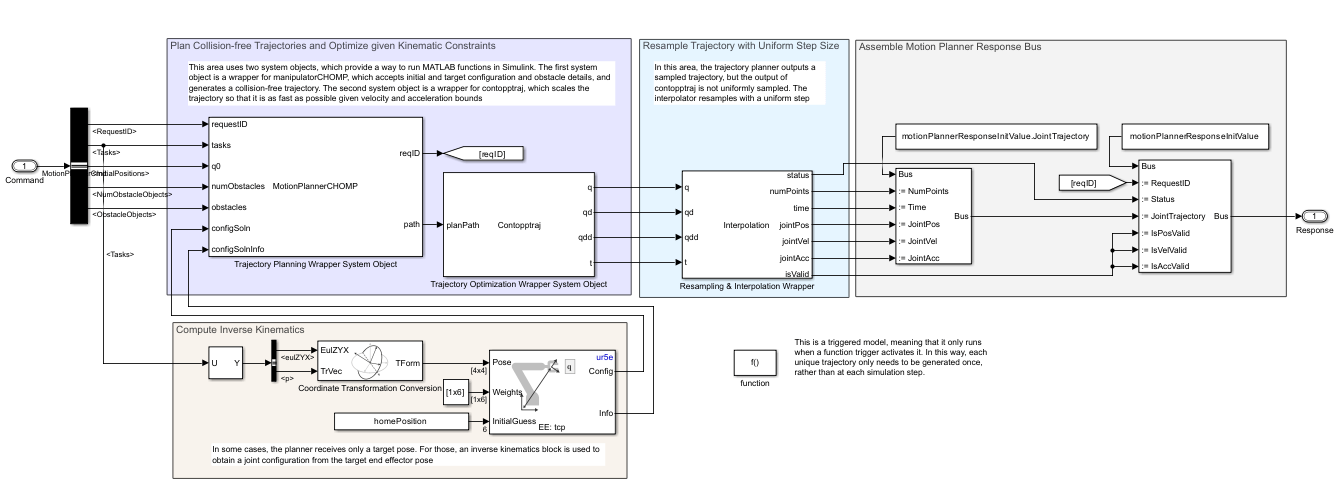
规划器模块由几个部分组成:
<