前言:版本条件
- gazebo7.16 + ubuntu16.04 + kinetic
1 安装turtlebot2
1)打开终端(ctrl+Alt+T):
sudo apt-get update
2)安装turtlebot相应的源,参考创客智造中indigo的源,链接如下:
https://www.ncnynl.com/archives/201609/791.html
继续在终端中:
sudo apt-get install ros-kinetic-turtlebot ros-kinetic-turtlebot-apps ros-kinetic-turtlebot-interactions ros-kinetic-kobuki-ftdi ros-kinetic-ar-track-alvar-msgs ros-kinetic-turtlebot-simulator
这里需要下载的东西很多的,时间挺长的。
3)少了两个ros-kinetic-rocon-remocon 与ros-kinetic-rocon-qt-library,这两个需要手动安装:
cd ~/catkin_ws/src
git clone https://github.com/robotics-in-concert/rocon_qt_gui.git
git clone https://github.com/turtlebot/turtlebot_simulator.git
上面最后一个链接原来叫simulation,不过会下载不了,因为文件名现在已经变了,我进github里面看过,改成了simulator,而且自己下载后用起来也没问题,所以在这里是可以clone的。
下载后,在src里面会看到两个package。
4) 回到catkin_ws目录下执行catkin_make,但是发现显示缺少东西,这时候还需要下载两个依赖源;
sudo apt-get install pyqt4-dev-tools
sudo apt-get install pyqt5-dev-tools
然后再catkin_make,显示成功就没问题啦。
接下来按照创客智造教程里面继续仿真就可以,主要用到两个可视化界面,一个gazebo,一个是rviz。在下载kinetic的时候,这两个软件包都有,但是,在你根据教程启动:
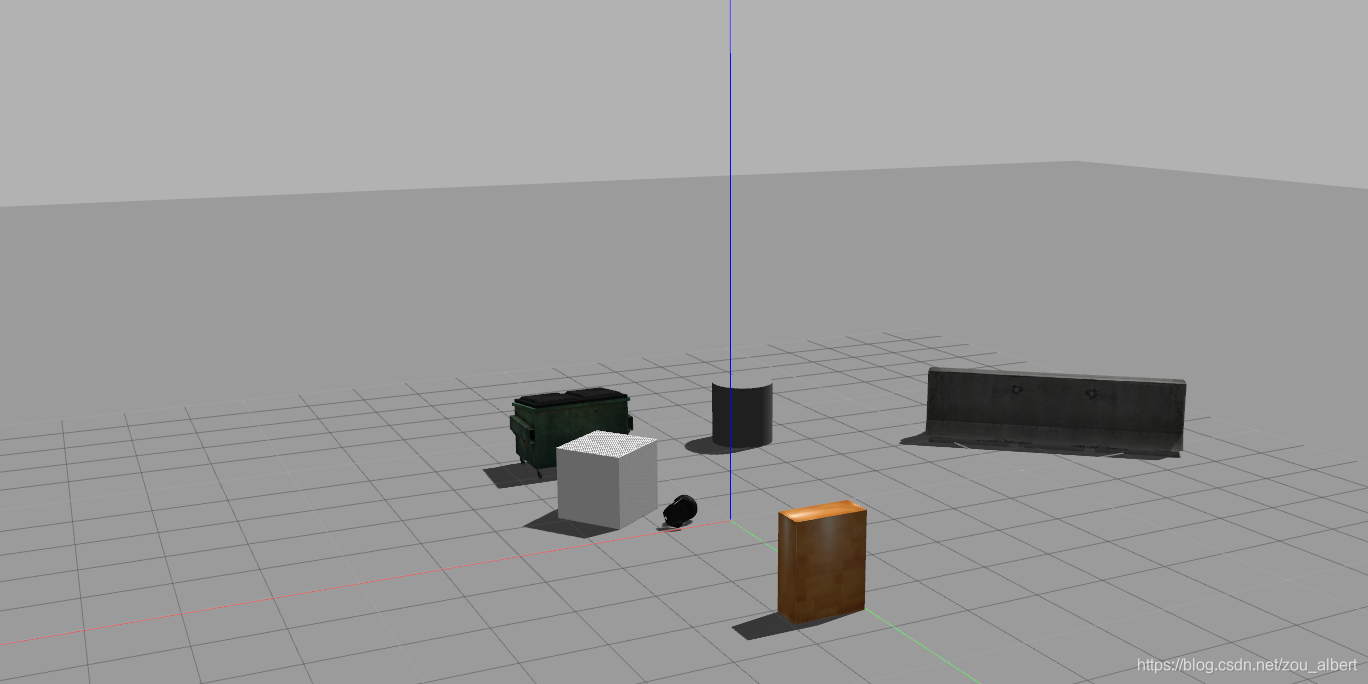
roslaunch turtlebot_gazebo turtlebot_world.launch
效果如下所示,在gazebo之中显示成功的,第一次gazebo加载时间挺长的,要耐心等待。
如果打开的gazebo是黑色的,没任何反应,等待几分钟后还是一样。这是因为, model库加载不正确导致的。(我没有出现过,这个别人遇到过的,我在这里记录一下)

二、解决gazebo打开黑屏问题
$cd ~/
$ hg clone https://bitbucket.org/osrf/gazebo_models
下载完成后讲gazebo_models复制到~/.gazebo文件夹中,重命名为models。
这个.gazebo文件就在你的home里面,但是是隐藏文件,可以使用cp命令copy文件过去,改名怎么改的我忘了,百度一下吧。。
举例:home/yang/.gazebo/models
可以看到,这个.gazebo就在你的用户名目录下,复制的时候就用这个路径。
然后再次启动
roslaunch turtlebot_gazebo turtlebot_world.launch
可以正常显示了。