版权声明:这些都是咸鱼Nova最后的挣扎,各位大佬转载请注明出处 https://blog.csdn.net/weixin_40883049/article/details/88753694
ubuntu16.04 安装ros kinetic
本文主要借鉴了韩国书籍《ROS机器人编程》的安装章节
一. 添加代码列表
在ros-latest.list添加ROS版本库。打开新的终端窗口,输入如下命令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/
sources.list.d/ros-latest.list
二. 设置公钥(Key)
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A389552
3BAEEB01FA116
三. 更新软件包索引
$ sudo apt-get update && sudo apt-get upgrade -y
四. 安装ROS Kinetic Kame
使用以下命令安装台式机的ROS功能包。这包括ROS、rqt、RViz、机器人相关的库、仿真和导航等等。
$ sudo apt-get install ros-kinetic-desktop-full
注意,本人曾经在一台电脑上执行这条命令时发生下列错误:
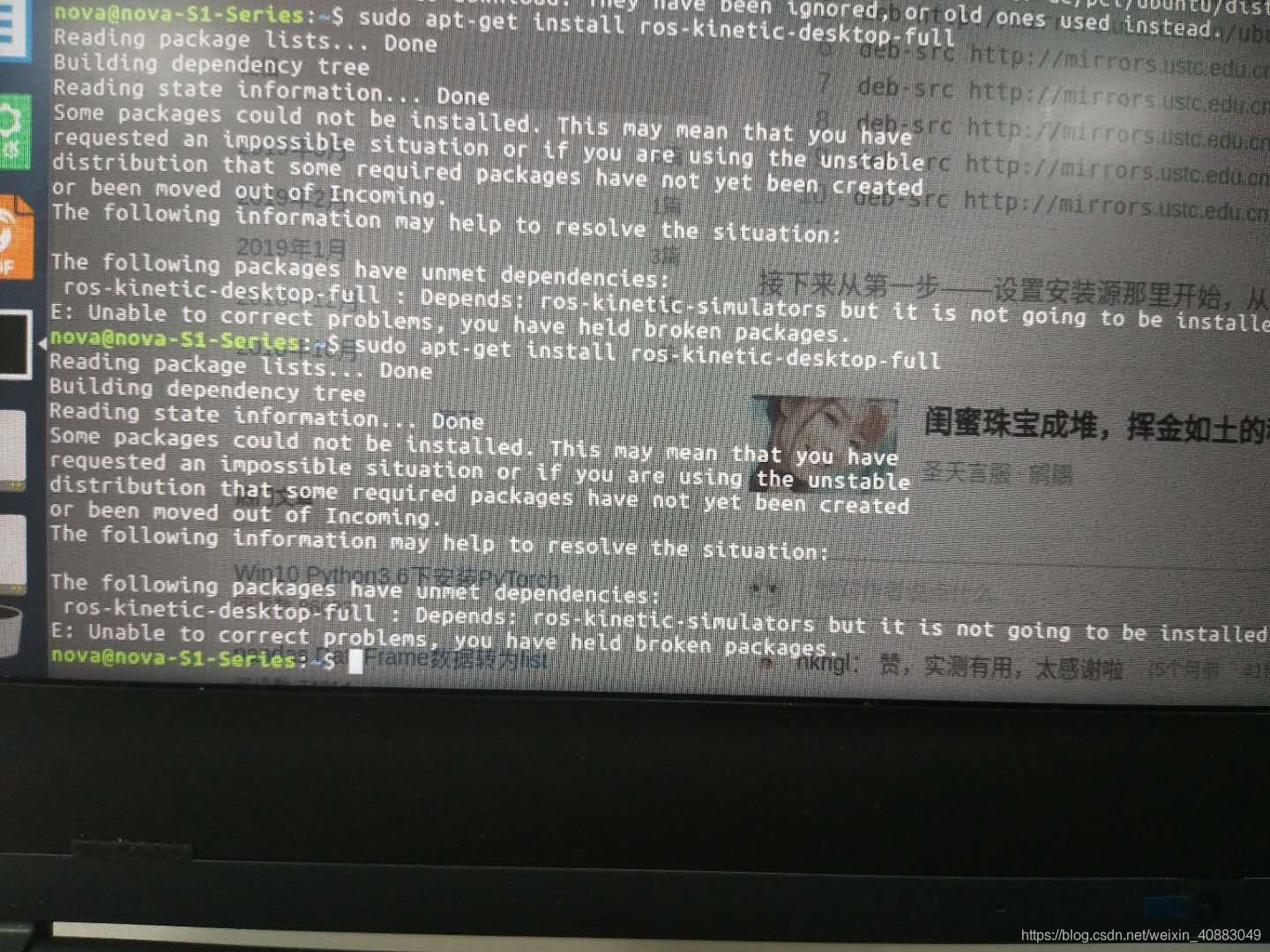
我现在也没有闹清楚是什么导致的这种情况,可能时源处的软件包层次发生变化,或者时我的机子某些配置发生问题。
解决方法就是按照它提示的来,先安装ros-kinetic-simulators,这时它会继续报相似的错误(由于当时没有截图,这里无法展示缺少的是什么),这时只要再先安装它新报错的库就可以了,然后一层一层再安装回来,就像压栈一样。
五. 初始化rosdep
在使用ROS之前,必须初始化rosdep。rosdep是一个通过在使用或编译ros的核心组件时轻松安装依赖包来增强用户便利的功能。
$ sudo rosdep init
$ rosdep update
六. 安装rosinstall
$ sudo apt-get install python-rosinstall
七. 加载环境设置文件
下面加载环境设置文件。里面定义着ROS_ROOT和ROS_PACKAGE_PATH等环境变量。
$ source /opt/ros/kinetic/setup.bash
八. 创建并初始化工作目录
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
构建
$ cd ~/catkin_ws/
$ catkin_make
九. 加载与catkin构建系统相关的环境文件
$ source ~/catkin_ws/devel/setup.bash
十. 测试安装结果
现在通过输入以下命令来运行roscore。
$ roscore
如果运行之后像下面没有出现错误,则说明成功安装
... logging to /home/pyo/.ros/log/9e24585a-60c8-11e7-b113-08d40c80c500/roslaunch-pyo-5207.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://localhost:38345/
ros
_
comm version 1.12.7
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.7
NODES
auto-starting new master
process[master]: started with pid [5218]
ROS
_
MASTER
_
URI=http://localhost:11311/
setting /run_id to 9e24585a-60c8-11e7-b113-08d40c80c500
process[rosout-1]: started with pid [5231]
started core service [/rosout]
十一. ROS配置
首先,使用文本编辑器gedit程序来加载bashrc文件\
$ gedit ~/.bashrc
打开bashrc文件就可以看到已经有了很多设置。不要修改以前的设置,而是到
bashrc文件的最底部添加以下内容
# Set ROS Kinetic
source /opt/ros/kinetic/setup.bash
source ~/catkin_ws/devel/setup.bash
# Set ROS Network
export ROS_HOSTNAME=xxx.xxx.xxx.xxx
export ROS_MASTER_URI=http://${ROS_HOSTNAME}:11311
# Set ROS alias command
alias cw='cd ~/catkin_ws'
alias cs='cd ~/catkin_ws/src'
alias cm='cd ~/catkin_ws && catkin_make'