环境:Ubuntu16.04
前序:
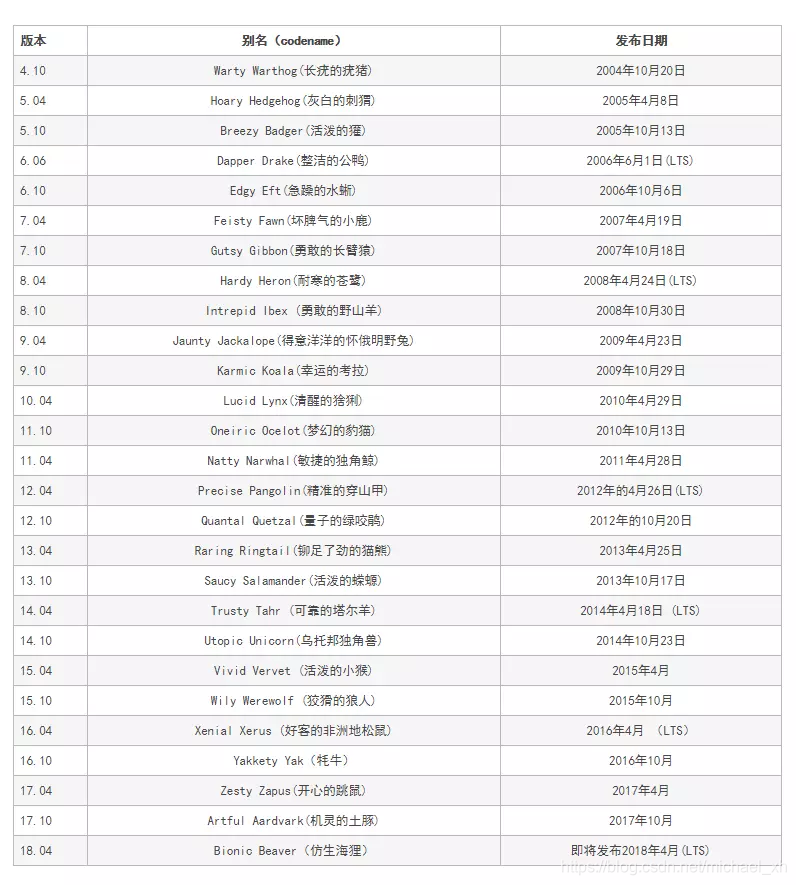
Ubuntu中,每个版本都有一个更为特色的名字,这个名字由一个形容词和一个动物名称组成,并且,形容词和名词的首字母都是一致的。
Ubuntu版本的命名规则是根据正式版发布的年月命名,Ubuntu 16.04 也就意味着 2016年4月发布的Ubuntu,研发人员与用户可从版本号码就知道正式发布的时间。
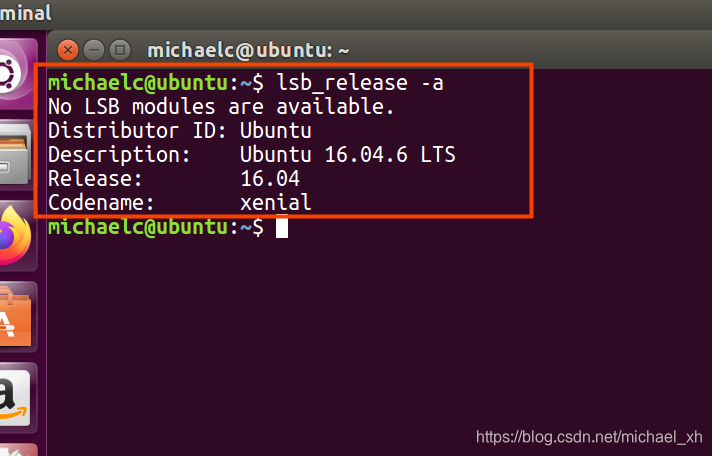
如何查看电脑Ubuntu版本呢,可以直接开一个终端输入:lsb_release -a
显示如下:
Distributor ID: Ubuntu //类别是ubuntu
Description: Ubuntu 16.04.3 LTS //16年3月发布的稳定版本,LTS是Long Term Support:长时间支持版本,支持周期长达三至五年
Release: 16.04 //发行日期或者是发行版本号
Codename: xenial //ubuntu的代号名称
ROS发行版:
ROS每年更新一个版本,其中偶数年份的为LTS版本,为长期支持版本

Ubuntu 和 ROS 版本对应
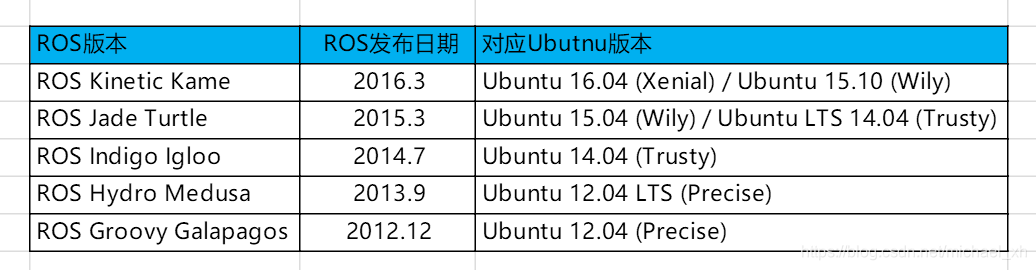
这里的安装环境为Ubuntu16.04,因此安装ROS Kinetic版本。
第一步:《更改源》:选择不同的源下载速度不同,也有些源下载某些包失败。
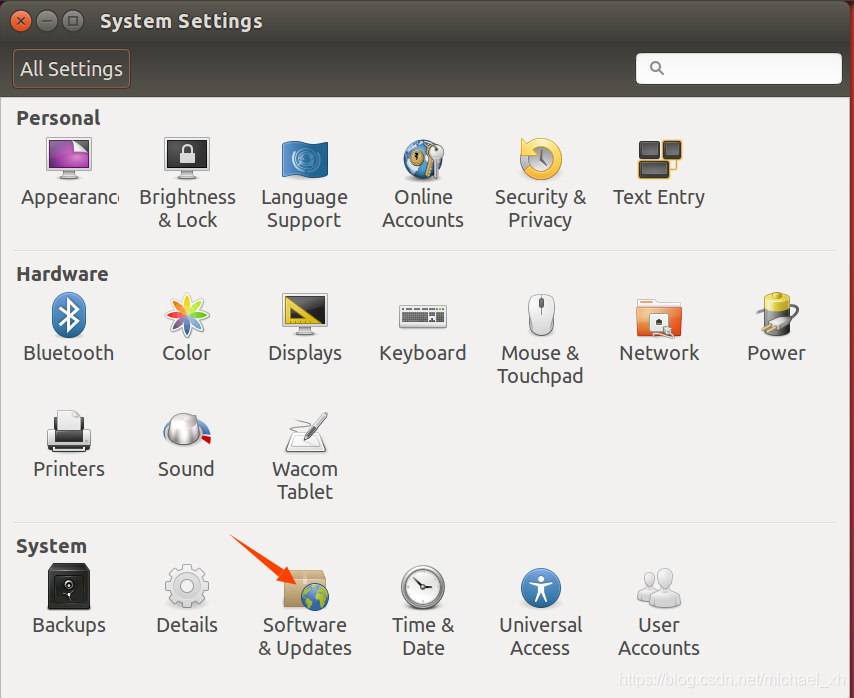
1.1进入系统设置

1.2软件&更新
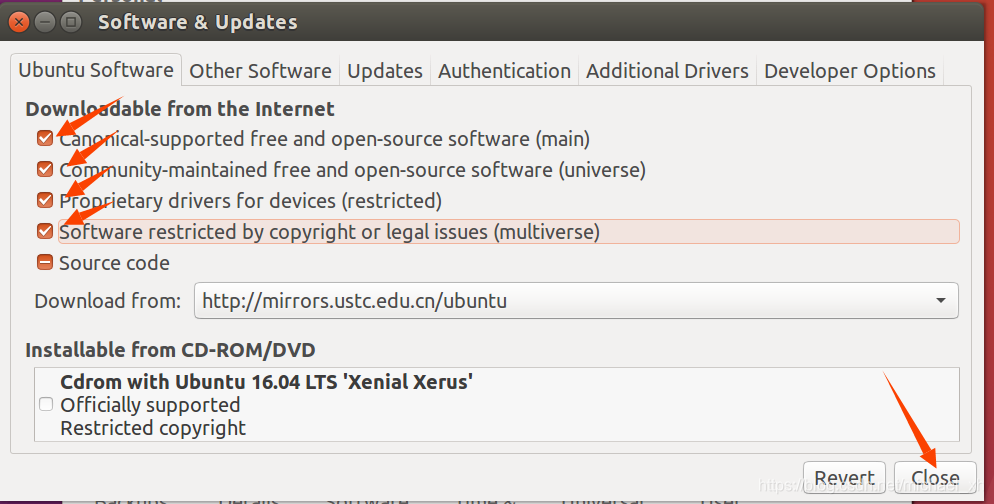
1.3选择源及权限
图上的几个勾默认是选上的,如果没有选上,选成上图这样(如果修改过勾,点击关闭会让你输入密码,然后选择重新载入,等到载入完毕再点关闭)
1.4 添加源
我用的是中国科学技术大学(USTC)镜像源(亲测可用,之前用阿里和清华的下载较慢)
1.4.1
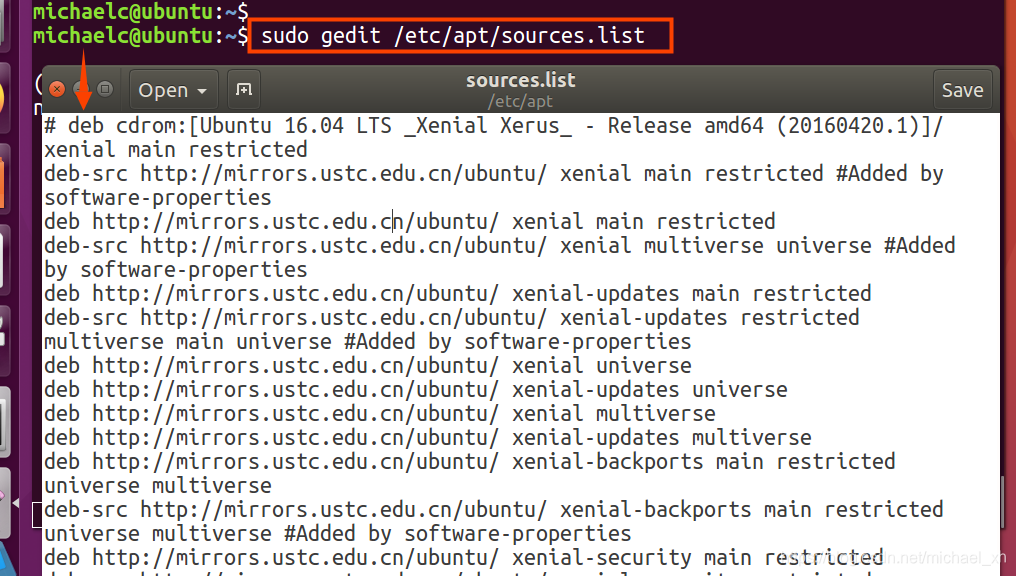
$ sudo gedit /etc/apt/sources.list
1.4.2 清空里面的内容,替换为如下:
#deb cdrom:[Ubuntu 16.04 LTS Xenial Xerus - Release amd64 (20160420.1)]/ xenial main restricted
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted #Added by software-properties
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial multiverse universe #Added by software-properties
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates restricted multiverse main universe #Added by software-properties
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial universe
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates universe
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse #Added by software-properties
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-security restricted multiverse main universe #Added by software-properties
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security universe
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security multiverse
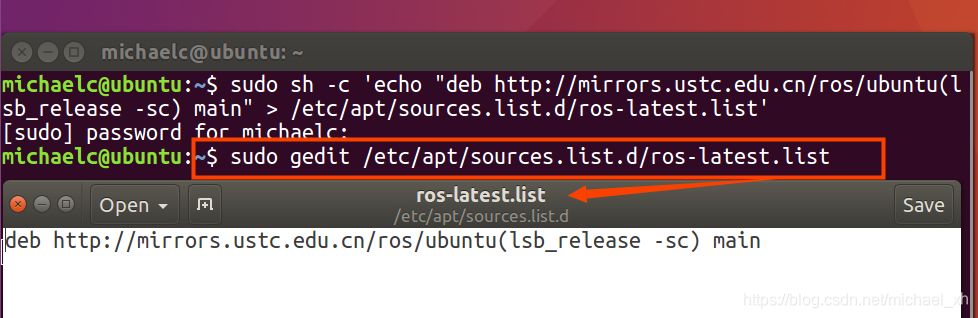
1.5、添加ROS软件源
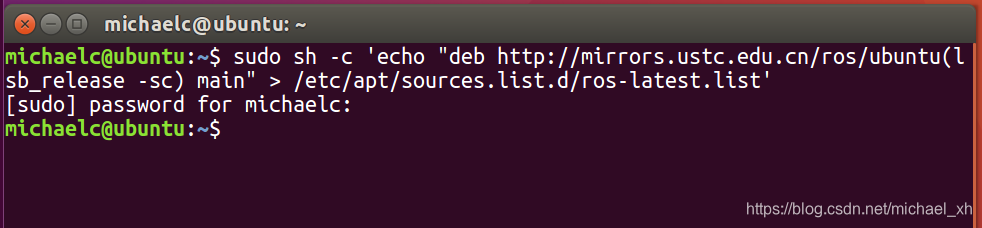
1.5.1
$ sudo sh -c ‘echo “deb http://mirrors.ustc.edu.cn/ros/ubuntu(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
1.5.2(可不做)查看ros源是否被添加
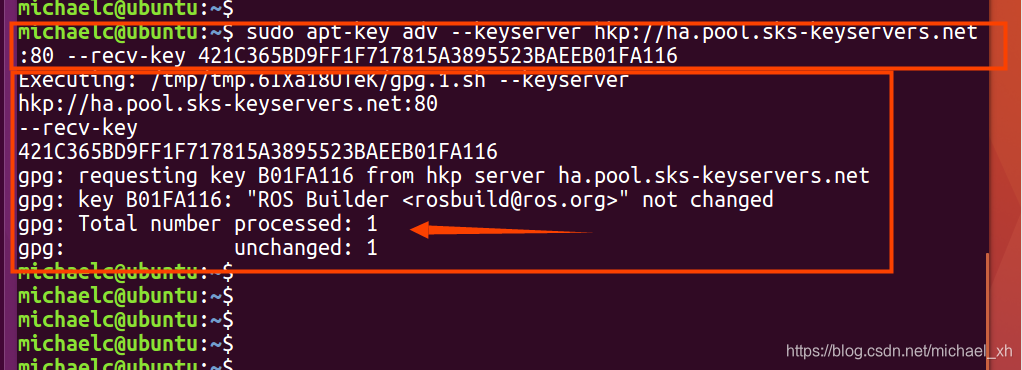
1.6添加秘钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
(确认添加成功,无报错)
第二步:《安装ROS》
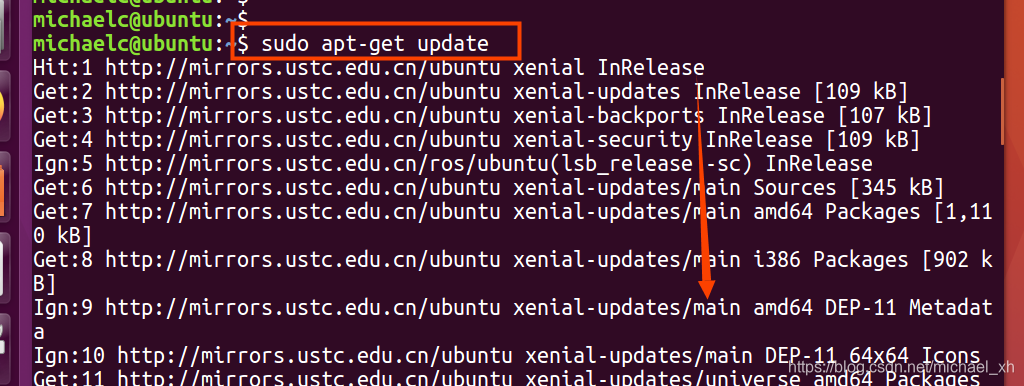
2.1 更新软件源 (先确保之前修改的软件源得以更新)
$ sudo apt-get update
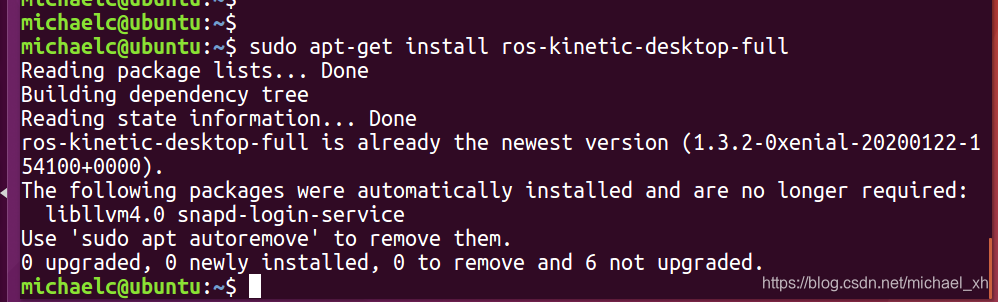
2.2
$sudo apt-get install ros-kinetic-desktop-full
2.3安装完成后的确认
第三步:《初始化ROS及配置》
3.1 初始化ROS
3.1.1
$ sudo rosdep init
3.1.2
$ rosdep update
3.2 初始化环境变量:
3.2.1
$ echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc
3.2.2
$ source ~/.bashrc
3.3 安装额外依赖包:
$ sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
3.4 关闭所有的终端(相对于source 环境,手动source也是可以的(source /opt/ros/kinetic/setup.bash))
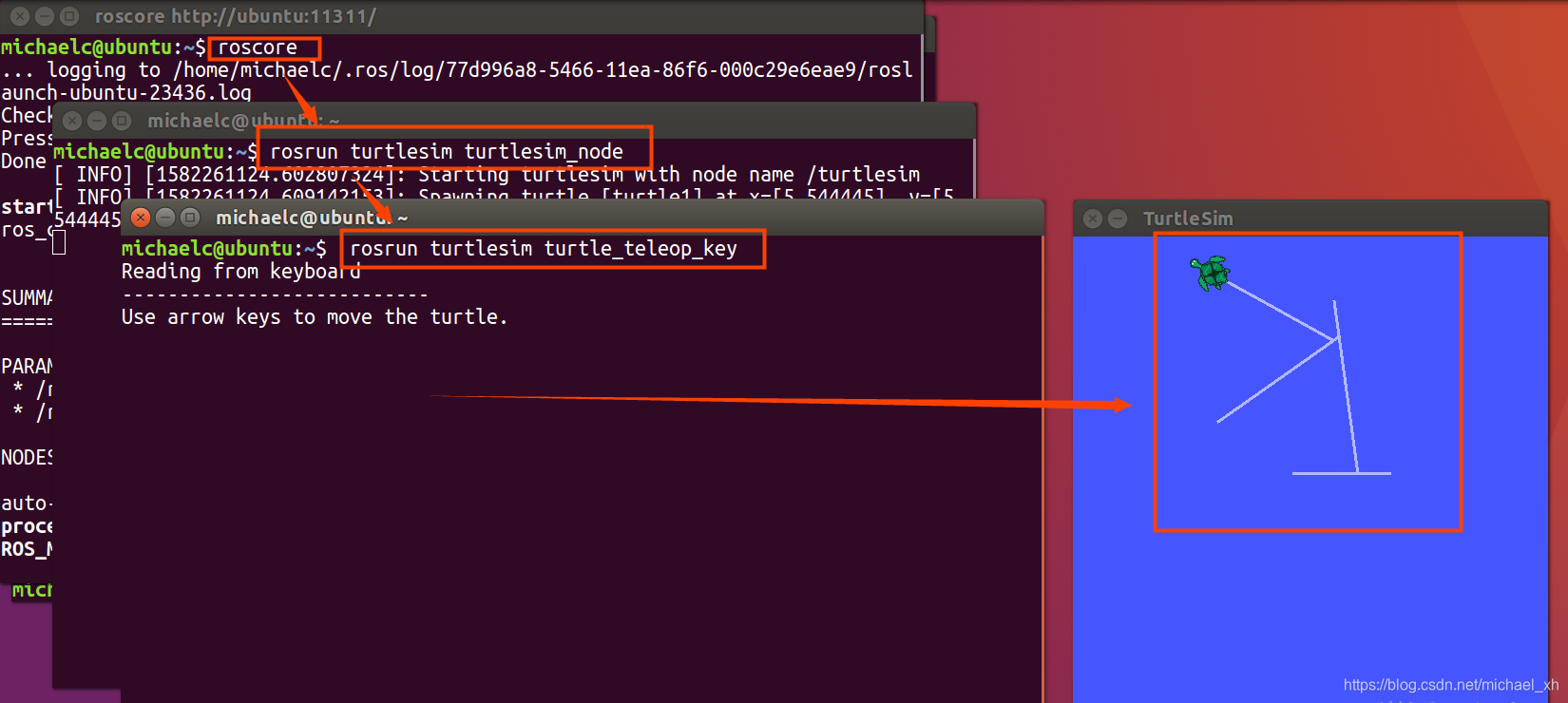
第四步:《测试ROS》
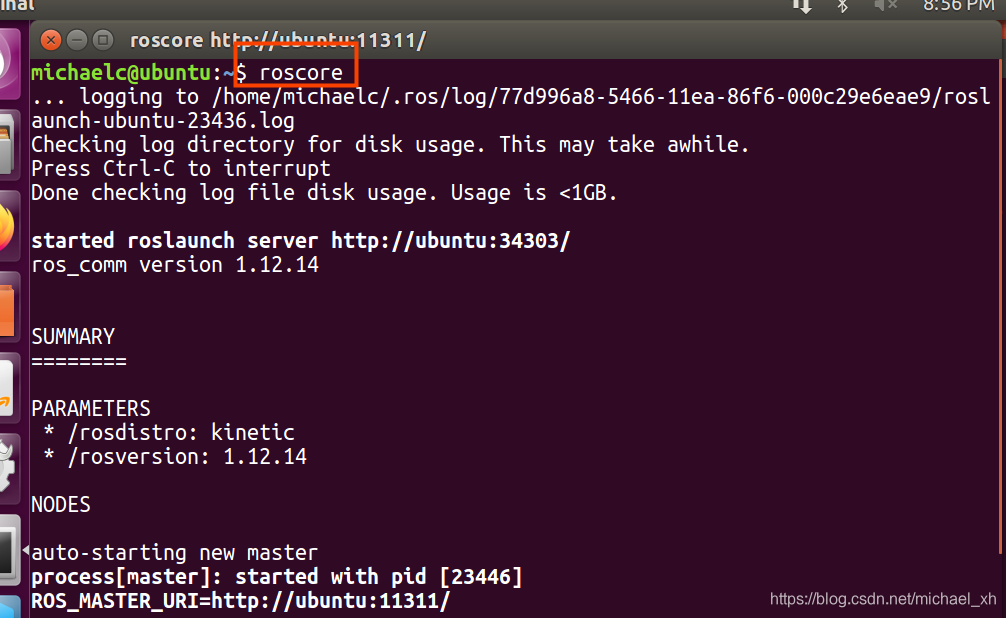
4.1启动ROS环境
$ roscore
4.2启动小乌龟测试程序(新终端)
$ rosrun turtlesim turtlesim_node

4.3启动键盘控制小乌龟(新终端)
$ rosrun turtlesim turtle_teleop_key
4.4通过按上下左右键就可以控制小乌龟移动了,效果图如下(到此恭喜你完成了ROS的整个安装流程了)