ROS的版本周期和ROS正式支持的操作系统Ubuntu的新版本周期一样,是每年发布两次(4月和10月)。针对每两年发布的Ubuntu长期支持版(Long term Support)发布的ROS版本提供与LTS一样的5年的支持周期。与Ubuntu 16.04 Xenial Xerus (LTS)对应的ROS版本为ROS Kinetic Kame。
安装步骤:
-
打开ubuntu系统的软件和更新,进行如下配置。建议将下载源设置为国内的中科大服务器,比默认的官网服务器下载速度快,且问题少。
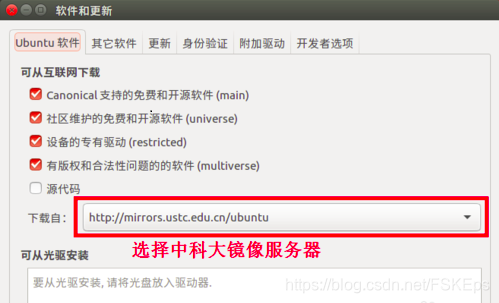
-
选择下载源,打开终端,输入如下命令
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' -
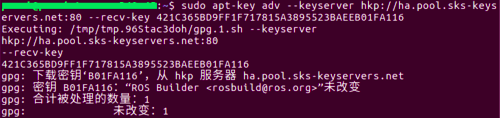
设置密匙
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
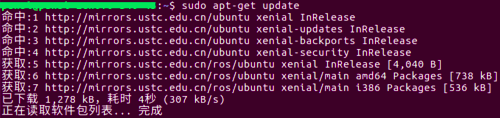
4. 更新源
sudo apt-get update
5. 安装ROS(建议全安装)
sudo apt-get install ros-kinetic-desktop-full

6. 初始化rosdep
sudo rosdep init
rosdep update
7. 设置环境
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc

8. 安装一些工具,便于创建和管理自己的ROS工作空间
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
9. 安装完成,测试ROS
roscore