版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/windsnow1/article/details/79839044
最近和小伙伴们学习开发无人机的过程中,发现DJI的On_board SDK中提供了ROS NODE,通过使用ROS NODE,能够实现无人机的导航与避障。注意,当前DJI的ROS环境是Kinetic版本的,下面是参考wiki上的安装教程,原安装链接http://wiki.ros.org/kinetic/Installation/Ubuntu。
为了更加简单明了的安装,我将简单的安装过程写下:
打开终端:
Configure your Ubuntu repositories
打开系统设置—-选择软件更新—-安装图示勾选以及选择下载服务器。(推荐使用国内阿里镜像)
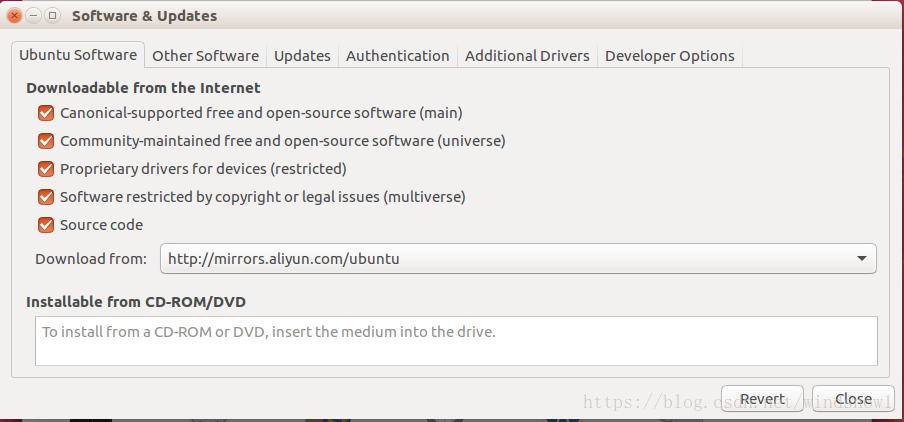
其实第一步不配置似乎影响不大,主要是防止有些文件下载被墙
Setup your sources.list
终端输入:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'Set up your keys
终端输入:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116Installation
终端输入:
sudo apt-get updatesudo apt-get install ros-kinetic-desktop-fullInitialize rosdep
终端输入:
sudo rosdep init
rosdep updateEnvironment setup
终端输入:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrcDependencies for building packages
终端输入:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential到此为止,ROS环境已经安装完毕。
在终端输入roscore,若弹出如下内容,证明安装成功。

谢谢我的小伙伴,今天你不舒服,好好休息。也希望和大家好好交流,互相帮助,以上若有问题,欢迎大家指正,以便小编我及时纠正。