0. 映射
在机器人学的许多问题中,都需要使用不同的参考坐标系来表达同一个量,为了描述从一个坐标到另一个坐标的变换,机器人学引入了映射的概念。
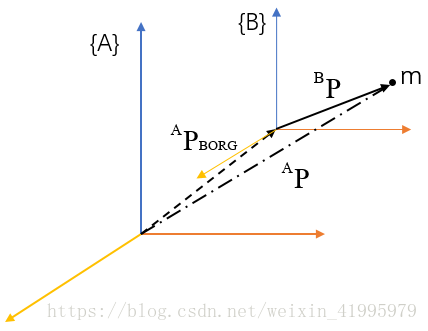
0.0 平移坐标系的映射
如下图所示,坐标系{A}和{B}的姿态是相同的,在空间中有一个点m,我们希望使用坐标系{A}来表示点m,由于两个坐标系是平移关系,所以矢量aPborg可以直接表示为{B}相对{A}的位置关系。
在两个坐标系拥有相同姿态这种特殊情况下,我们可以简单地使用矢量的相加求得点m相对坐标系{A}的表示——矢量aP
将一个矢量从一个坐标系映射到另一个坐标系这整个过程中,矢量表示的点的位置并没有发生任何改变,只是描述的方式不同了而已。
所以映射的概念就是,“描述”从一个坐标系到另一个坐标系的变换。变换的不是别的,是描述。
在这个过程中,我们称矢量aPborg定义了这个映射,由于两个坐标系的姿态相同,所以矢量aPborg已经具备了变换所需要的所有信息。

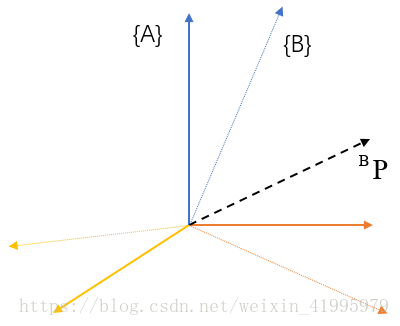
0.1 旋转坐标的映射
在上一篇博文中,我们看到了用一组三个矢量的矩阵来表示坐标系的旋转变换,该矩阵称为旋转矩阵。
假设现在我们知道一个矢量相对于某个坐标系的表示,想要得到该矢量相对于另一个坐标系的表达,而且前后两个坐标系的原点相互重合。也就是说后者是由前者做单纯的旋转变换得到的。
如上图所示,我们已知bP以及{A}和{B}的变换关系,现在想求出aP
那么只要用bP与旋转矩阵相乘就能够得到aP
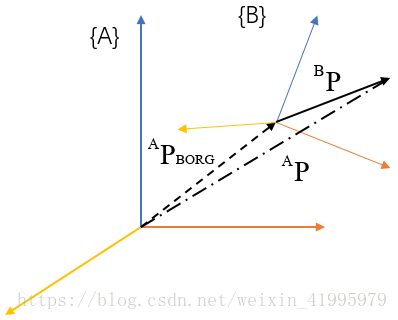
0.2 一般坐标系的映射
前面说的两种情况比较特殊,分别只有位置和姿态的变换,那如果上升到坐标系层面的变换,即位置和姿态同时变换的时候,映射会是怎么样的呢?
现在我们就来考虑映射的一般情况:
整个变换过程一次进行的话比较麻烦,那我们就把他拆开来看,寻找一个中间坐标系,该坐标系与{A}的姿态相同,原点与{B}重合。这样我们就能把变换拆分成先平移后旋转的方式,无论从直观上还是从数学上看都会方便很多。
在数学推导的过程中,我们也会使用一种更加简洁的方式来表达上式