0. 算子:平移、旋转和变换
用于坐标系间点的映射的通用数学表达式称为算子,包括点的平移算子、旋转算子和平移加旋转算子。
0.0 平移算子
平移将空间中的一个点沿着一个已知的矢量方向移动一定距离。对空间中一点实际平移的描述仅与一个坐标系有关。空间中点的平移与此点向另一个坐标系的映射具有相同的数学描述,因此弄清楚映射的数学意义是非常重要的。这个区别很简单:当一个矢量相对于一个坐标系“向前移动”时,既可以认为是矢量“向前移动”,也可以认为坐标系“向后移动”,两者的数学表达式是相同的,只不过是观察的位置不同。
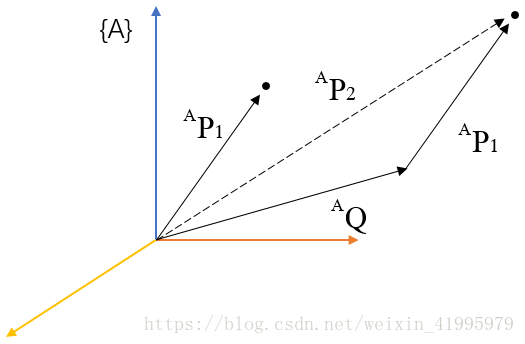
如上图所示,将aP1沿着aQ平移
平移的结果是得到一个新的矢量aP2
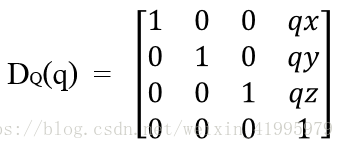
用矩阵算子写出的平移变换是:
其中:
表达式中的q是沿已知矢量方向平移的数量,它也是有符号的。qx、qy、qz是平移和矢量Q的分量,而且:

0.1 旋转算子
旋转矩阵还可以用旋转变换算子来定义,它将一个矢量
aP1用旋转变成另一个矢量aP2
用旋转算子写出的数学表达式是:
旋转和平移的情况一样,旋转变换和旋转映射的数学表达式相同,只是意义不同。
矢量经某一旋转R得到的旋转矩阵与一个坐标系相对于参考坐标系经某一旋转R得到的旋转矩阵是相同的。
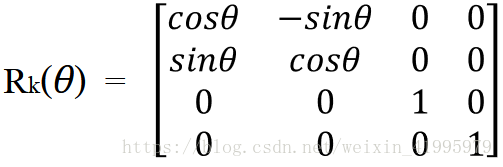
我们使用另一个符号来表示旋转算子以明确说明是绕哪个轴旋转的:
上式中的k表示绕K轴旋转,θ表示旋转的角度。将这个算子变成矩阵的形式如下:
0.2 变换算子
相同,坐标系也可以使用变换算子来定义。坐标系和坐标系映射的数学描述也是相同的,也是意义不同。
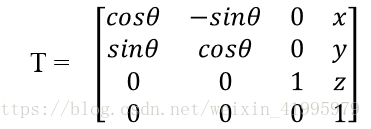
一个变换通常被认为是由一个广义旋转矩阵和位置矢量分量组成的齐次变换的形式。
形如下图:
这就是一个算子T,表示了绕Z轴旋转θ度,沿X轴平移x个单位,沿Y轴平移y个单位,沿Z轴平移z个单位