0.姿态的其他描述方法
如果你也有看机器人学导论的原书的话,可能会看到这样一个东西:正交矩阵的凯莱公式。不知道你是怎么样的,反正我是一脸懵逼,有这么个东西吗?百度好像也找不到呀,最后还是靠谷歌和原书的参考文献才找到这么个东西的。
正交矩阵的凯莱公式
0.0 X-Y-Z固定角坐标系
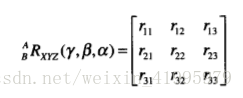
下面介绍一种描述坐标系{B}姿态的方法:

我们发现每个旋转都是围绕着坐标系{A}的轴在进行的,我们称这种姿态的变换方式叫做X-Y-Z固定角坐标系
既然整个旋转变换都是在一个固定的坐标系下进行的,那么我们就可以直接来推导该旋转的等价旋转矩阵:
tip:表达式中出现的‘c’和‘s’其实是“cos”和“sin”的缩写
将上式进一步化简得到:
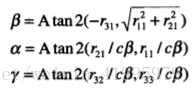
有了这些还不够,我们可能对如何求出一个旋转矩阵等价的X-Y-Z固定角坐标系。
这时候我们可以列出九个方程,但其实我们只有3个未知量,那么解方程就变得轻松起来了
其中的Atan2(x,y)是一个双参数的反正切函数
很明显,β的值是±90,那么在这种情况下,我们只能求出α和γ的和或者差,所以我们一般取α = 0
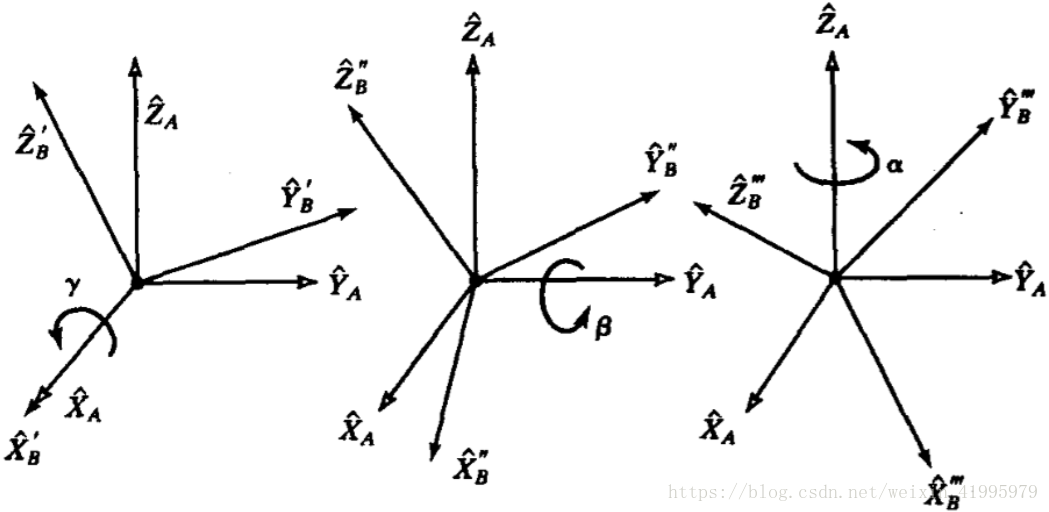




0.1 Z-Y-X欧拉角
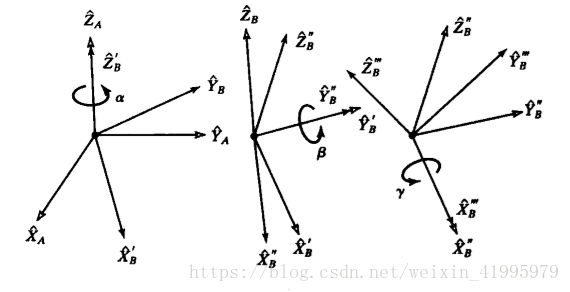
第二种{B}表示方法:
与上一个表示法不同的是:
(1)顺序不同:上一个是XYZ,这个是ZYX
(2)旋转轴不同:上一个是绕固定的旋转轴,这次是绕运动的旋转轴
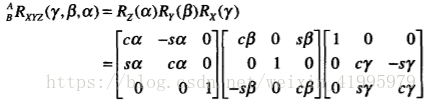
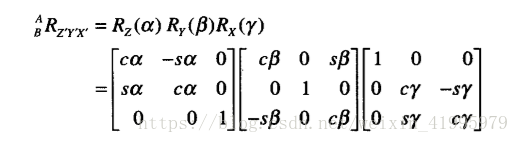
如果把这些旋转的过程看成坐标系的描述,那么我们可以写成下面这种形式:
对上式进行展开:
最终我们得到:
你是否发现,这个结果好眼熟啊,没错这跟上一个的结果是一样的。
这是一个比较隐晦的、不直观的结果:三次绕固定轴旋转和按照相反顺序绕运动轴旋转得到的最终姿态是相同的。



0.2 Z-Y-Z欧拉角
类似之前的操作,我们可以得到下式:
那我们照常要来讨论一下如何从旋转矩阵得到Z-Y-Z欧拉角:




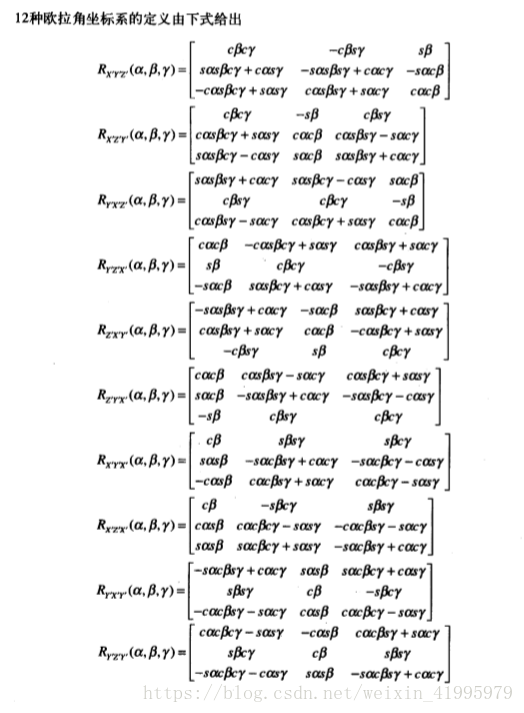
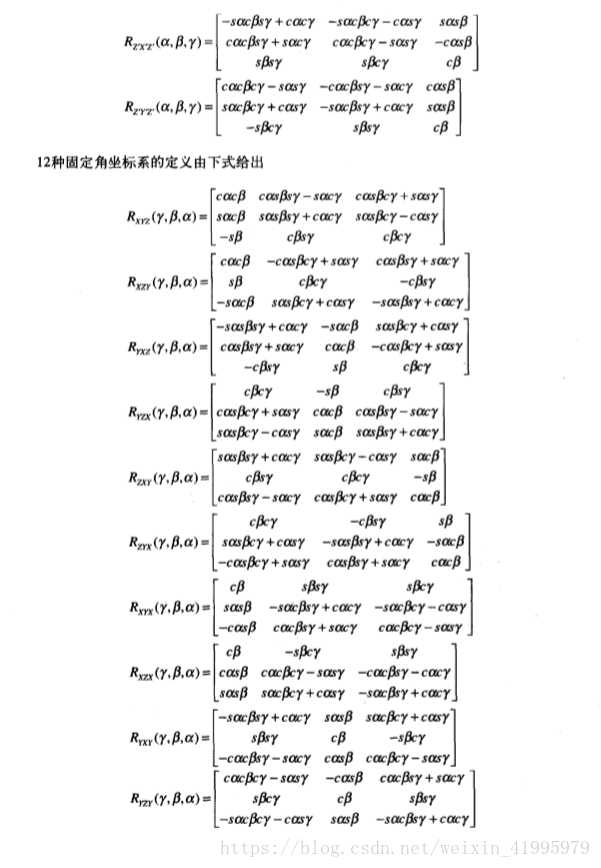
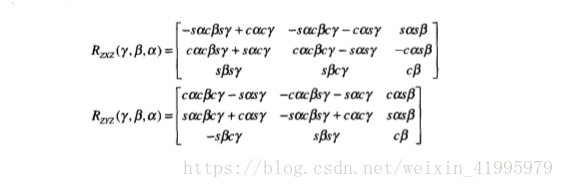
0.3 其他角坐标系表示法
以上讲了三种表示姿态的常见表示法,每个表示法都需要按照一定的顺序进行三次绕主轴的旋转,这些表示法是24种表示法中的典型方法,且都被称为角坐标系表示法。】
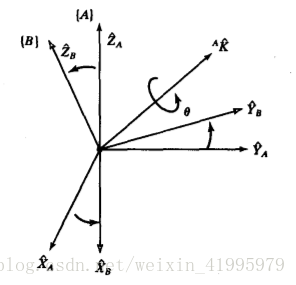
0.4 等效轴角坐标表示法
如果给你一个符号Rx(30.0),你应该知道这是要绕X轴旋转30度,这就是一个等效轴角坐标表示法的例子。但是如果我们不是要绕某一主轴旋转,而是在空间中找一个一般的矢量作为旋转轴来旋转那该怎么办呢?
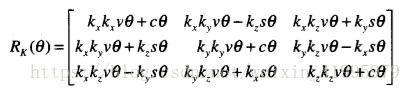
这就可以衍生出一个新的表示法了:
当旋转轴是一般矢量时,其等效旋转矩阵为:

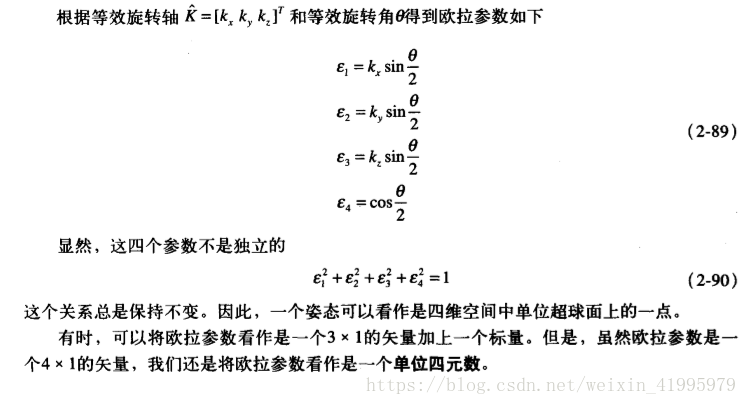
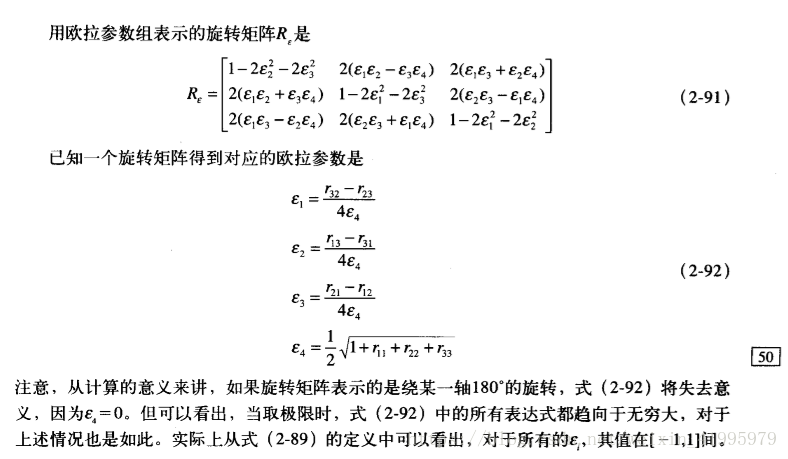
0.5 欧拉参数
另一种姿态表示法是通过四个数值来表示的,称为欧拉参数