0.空间描述:位置、姿态与坐标系
0.0 位置描述:
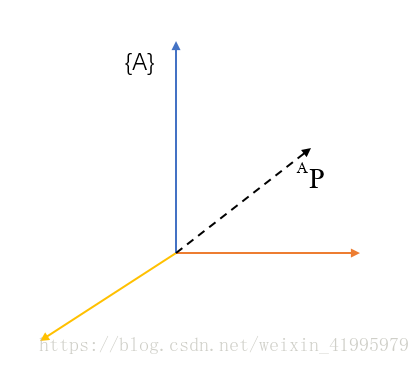
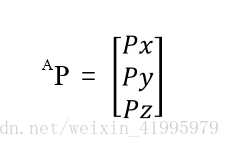
位置描述这个没什么好说的,就是用矩阵的方式表示空间坐标系中的矢量,如上图,在坐标系{A}中有矢量 aP ,其矩阵表示如下图,其数值就是矢量在当前坐标系下的模长。
0.1 姿态描述:
我们可以很直观地明白一个道理,在空间中描述一个物体,单单有位置信息是不足够的,我们至少还需要一个姿态信息,所以这里就引入了姿态描述:
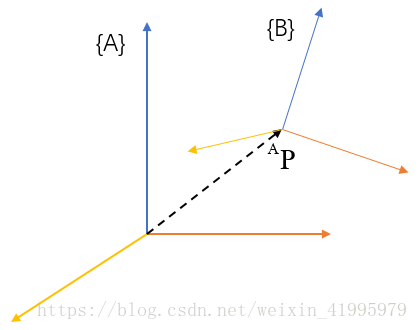
我们在物体上固定一个坐标系并且给出这个坐标系相对于参考系的表达
这时我们只要给出{B}对于{A}的描述就足够表示出物体的姿态。
我们所给出的描述就是数学上的旋转矩阵,从几何意义上看,一个矢量乘上一个旋转矩阵,相当于在空间中做特定的旋转运动,当然三个矢量也一样,那么就相当于一个坐标系旋转到另一个坐标系的位置。
一个旋转矩阵也就是一组三个矢量就可以确定一个姿态。
从数学上看,旋转矩阵就是旋转后的坐标系相对于原本坐标系的坐标表达,简单地说,就是要在{A}坐标系里表示{B}坐标系的三个轴
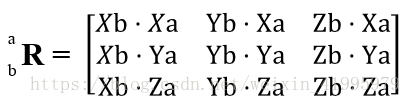
由于坐标轴的矢量我们都用单位矢量表示,经过推敲,我们可以得到旋转矩阵如下,旋转矩阵的各个分量可用一组单位矢量的点积来表示。
0.2 坐标系描述
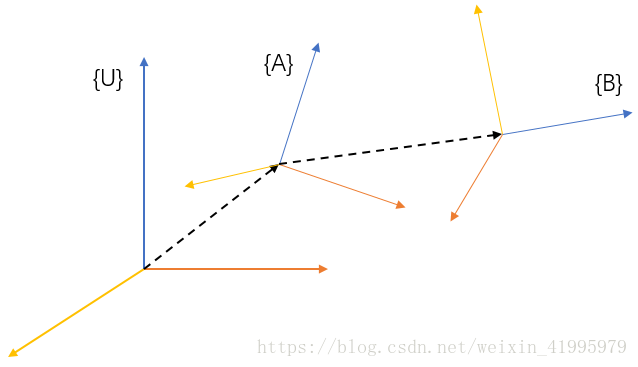
在机器人学中,位置和姿态经常成对出现,于是我们将此组合合称为坐标系,四个矢量为一组,表示了位置和姿态信息。
其实坐标系描述理解起来很简单,四个矢量分别是位置矢量和三个描述姿态的矢量,位置矢量描述的是该坐标系在其参考系中的原点位置,姿态描述的是该坐标系相对于其参考系的姿态信息。
假设现在已知世界坐标系中有两个坐标系,并且知道坐标系{A} 相对于世界坐标系的关系以及坐标系{B}相对于坐标系{A}的关系。
图中从原点到另一个原点的箭头表示了一个矢量,箭头方向表示{B}相对于{A}的关系而不是{A}相对于{B}的关系
一个参考系可以用一个坐标系相对于另一个坐标系的关系来描述
这段话我在读的时候有些难以理解,我想应该是书中的“参考系”和我们平常说的不是同一个概念,我想在这里更像是一个变换,我修改一下这段话:一个变换可以用一个坐标系相对于另一个坐标系的关系来描述—— 这就好理解多了。
坐标系变换包含了位置变换和姿态变换两个过程,将两个过程用四个矢量一组的矩阵表示,就成了书中所说的参考系
如果参考系中的旋转矩阵是单位矩阵,那么就表示姿态变换为不变,所以就仅仅只是位置上的变换;如果参考系中的位置矢量是零矢量,那么就表示做位置不变,单纯改变姿态的坐标系变换。