摘要:
电动汽车技术有望降低物流运营的成本和环境影响。因此,该领域正在进行许多研究。在操作层面上,最近引入了电动汽车路线问题(EVRP),并处理形成有效的车辆路线计划,同时满足一系列与电池有关的限制。本文对EVRP及其扩展进行了全面的文献回顾。在这种情况下,我们回顾了136篇已发表的考虑电池电动车路由的论文。明确定义了EVRP,讨论了基本EVRP的变化,给出了一个数学公式,也是问题的几个简单变化的模型,并详细讨论了开发的解决方法。此外,还介绍了EVRP基准集,最后,讨论了有趣的未来研究方向。
1.引文:
与基于化石燃料的发动机相比,电动汽车有希望减少运输成本和污染影响。然而 , 与基于化石燃料的车辆的加油操作相比 , 有限的巡航范围、长的充电时间和有限的充电设施可用性使得充电操作成为一个更关键的问题 ( Jing 等人 , 2016 ; Juan 等人 , 2016 ; Margaritis 等人 , 2016 ; Pelletier 等人 , 2016 ) 。电动汽车路由问题 ( EVRP ) 是传统车辆路由问题 ( VRP ) 的扩展 , 专门处理寻找电动汽车的优化路线 , 考虑到电池约束和充电操作 ( Keskin & Ç atay , 2016 ; Schiffer & Walther , 2017 ; Schneider 等人 , 2014 ) 。
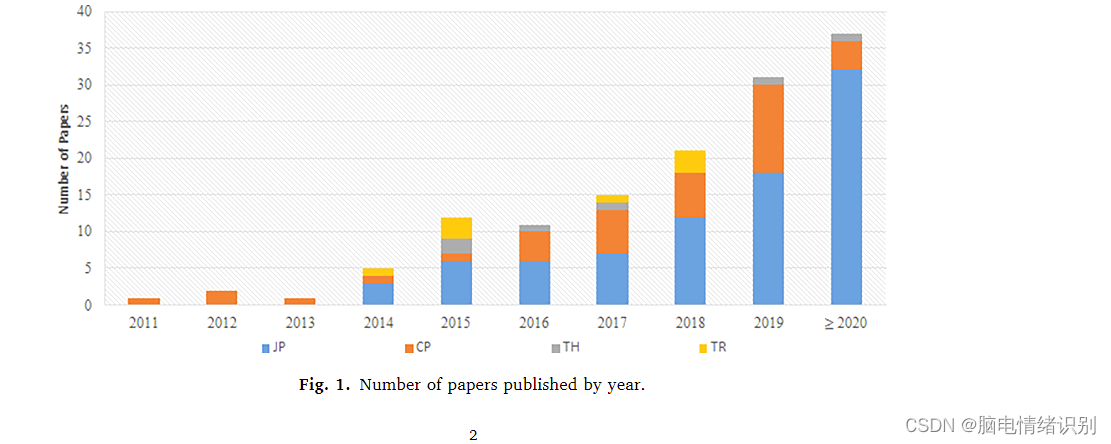
随着物流界对将电动汽车纳入其车队的兴趣越来越大,关于EVRP的学术研究也在同步增加,如图1所示。.本文通过考虑136篇期刊论文(JP)、会议记录(CP)、论文(TH)和技术报告(TR),对EVRP进行了全面调查。表1给出了已发表84篇学术论文的期刊的概况。
本调查的目的是对EVRP及其扩展进行全面的文献回顾。首先,现有的研究是按照四个标准来分类的:目标函数、能源消耗计算、考虑的额外约束和车队类型。然后,介绍了EVRP的数学公式及其基本变化。最后,回顾并介绍了为EVRP提出的现有解决方法和有用的问题数据集。本文对文献的贡献如下。
- 通过分析136篇出版物,提出了一个全面而详细的调查。到目前为止,Pelletier等人对电动汽车(包括EVRP)或EVRP进行了文献回顾。(2016), Juan et al.(2016), Dammak and Dhouib (2019), Erdeli ́ c and Cari ́ c (2019), Ghorbani et al.(2020)和Qin等人。(2021)。然而,只有几篇关于EVRP的论文被审查。表2显示了本研究中审查的论文,并指出了与其他审查论文的重叠之处。从表2可以看出,62篇被分析的论文不包括在任何现有的文献回顾研究中。
- 介绍了一个系统的分类。
- 总结了现有的解决方法,并通过比较一个流行数据集的结果,分析了七种不同的解决方法的性能。
- 通过讨论现有的研究差距,指出了潜在的研究方向。
本文的其余部分组成如下。第2节介绍了EVRP的细节。第3节给出了所考虑的EVRP论文在四个标准(目标函数、能耗计算、约束条件、车队类型)方面的分类。第4节介绍了EVRP的数学表述和它经常遇到的变化。 第5节对EVRP的解决方法为进行了总结和分类。在第6节中,基于众所周知的车辆路由问题的基本问题集被指定。此外,通过比较不同的解决方法,指出了最流行的基准数据集的最知名的解决方案。最后,第7节给出了结论和未来的研究前景。
5.解决方法
作为著名的VRP的延伸,EVRP还处理规划充电站的访问,同时确定客户在一条路线上的订单。由于 VRP 是一个 NP - hard 问题 , 而 EVRP 是 VRP 的泛化 , 所以 EVRP 同样可以被认为是强意义上的 NP - hard ( Desaulniers 等人 , 2016 ; Ferro 等人 , 2018 ; Roberti & Wen , 2016 ; S. Zhang 等人 , 2018 ) 。此外 , 增加前几节所述的限制 , 使问题的解决变得相当复杂 ( Afroditi 等人 , 2014 ; Desaulniers 等人 , 2016 ; Goeke & Schneider , 2015 ) 。文献中提出的解决方法可以分为精确法和启发式方法。然而,由于问题的复杂性,使用精确方法作为解决方法的研究数量非常少。Tahami等人。(2020)提出了一种分支切割算法来解决著名的EVRP。Desaulniers等人。(2016)介绍了一种精确的分支价格和切割算法来解决EVRP的四个变体:在完全充电政策下,每条路线最多只能进行一次充电;在完全充电政策下,每条路线最多只能进行一次充电;在部分充电政策下,每条路线最多一次充电。同样,Pierotti(2017)使用分支价格和切割算法来解决具有异质充电站的EVRPTW。Ceselli等人(2021)提供了一个带有多重充电的EVRP的分支和切割和价格算法。其中提议的算法依赖于基于路径的表述。Lee(2020)引入了一种分支和价格方法来优化解决具有非线性充电时间的EVRP的扩展版本。Wu和Zhang(2021)也考虑了分支和价格方法来解决双梯队EVRP。除了这些方法,商业求解器通常被用来寻找EVRP及其扩展的最优解。Paz等人(2018)和Küçüko ̆ glu和̈ Oztürk(2016)用不同的假设扩展了EVRPTW,并使用CPLEX这个商业求解器解决了他们的小规模问题(包括5、10和15个客户节点)。CPLEX也被用来解决不同的EVRP变体(例如,见Hulagu和Çelikoglu(2019),Keskin,Akhavan-Tabatabaei等人。(2019), Lin et al.(2016))。Aksoy等人将另一个商业求解器GUROBI用于EVRP。(2018), Chen et al.(2016), Cubides et al.(2019), Froger et al.(2017), Froger et al.(2018), Froger et al.(2019), Granada-Echeverri et al.(2020), Moghaddam (2015), Montoya et al.(2015), Schiffer and Walther (2017), and Wang et al.(2019)。
除了精确求解方法外,元启发式算法也被广泛用作EVRP的求解方法。表7给出了所审查的论文中使用的元启发式算法的概况:蚁群优化(ACO)、布谷鸟搜索(CS)、差分进化算法(DEA)、遗传算法(GA)、迭代局部搜索(ILS)、大邻域搜索/自适应大邻域搜索(LNS/ALNS)、记忆算法(MA)、模拟退火(SA)、塔布搜索/自适应塔布搜索/颗粒塔布搜索(TS/ATS/GTS)和可变邻域搜索表7的最后一栏还列出了与元启发式算法集成的额外程序。此外,表7中一行标记的一对元启发式算法表示这两种算法的混合结构。基于表7中给出的算法,图4介绍了这些方法的相对发生率。从表7和图4可以看出,LNS/ALNS、VNS/AVNS、GA和TS/ATS/GTS是EVRP中最常见的元启发式方法。
对于基于启发式的解决方法,直接影响搜索性能的基本问题之一是解决方案的表示。与经典的 VRP 一样 , 在现有的求解方法中通常采用包络有序的整数阵列来表示解决方案 ( Goeke & Schneider , 2015 ; K ü ç ü ko ̆ glu & ̈ Ozt ü rk , 2016 ; Roberti & Wen , 2016 ; Schiffer & Walther , 2018a ; Schneider 等人 , 2014 ) 。对于VRP来说,一个由客户地点组成的整数数组富含最早到达、最早离开、最晚到达和最晚离开的时间,可以开发高效的本地搜索算法(Mitrovi ́ c-Mini ́ c & Laporte, 2004)。然而,EVRP的解决方案还需要在路线计划中对车站进行充电访问。由于一条路线对充电站的访问次数不受限制,车辆可以不访问充电站,也不访问一个或多个充电站。此外,甚至有可能在一对客户节点之间进行多次充电站访问。此外,如果遵循部分充电政策,充电站的充电量是另一个关键决定。特别是对于有时间窗口限制的EVRP,需要很好地规划充电站的充电时间,以满足客户的时间窗口限制。因此,对于EVRP来说,可行的路线构建要比VRP困难得多。为了在电池容量方面制定可行的路线计划,文献中存在两种主要方法:启发式和最佳充电站插入方法。
启发式充电站插入方法以直接的方式搜索插入的解决方案空间。最常见的方法是连续地对充电站应用移除和插入程序。这已在许多研究中成功应用于EVRP(Felipe等人,2014;Goeke和Schneider,2015;Keskin&Çatay,2015;2016;Schiffer和Walter,2018a;Schneider等人,2014)。此程序需要由客户和充电站组成的解决方案代表。对于移除操作,根据启发式规则从路线中移除多个站点,例如随机选择、选择导致高行进距离的站点、选择导致较高电池使用率的站点等。类似地,将充电站插入路线中以恢复电池可行性。
作为启发式充电站插入方法的替代方法,在一些研究中应用了基于动态编程的前向标记算法(例如,见Hiermann等人的研究)。(2014), Hiermann et al.(2016), Jie et al.(2019), Küçüko ̆ glu et al.(2019)Pierotti(2017),以及Roberti和Wen(2016))。标签算法通过一个仅由客户位置组成的解决方案工作,并试图以最佳方式将充电站插入路线,同时保持电池容量或其他约束条件(如时间窗口)方面的可行性。该算法从仓库节点的初始标签开始(电池电量满),通过在客户节点之间插入可能的充电站,在每一步创建一组可行的标签。该算法为给定的客户节点路线提供了一套最佳的充电站插入(Roberti & Wen, 2016)。与启发式充电站插入方法相比,标签算法要耗时得多。然而,如果有足够的计算时间,这种标签算法产生的解决方案通常比使用启发式方法产生更好的解决方案。与Roberti和Wen(2016)的研究类似,Kullman等人。(2017),以及Kullman等人。(2018)为具有不确定充电站可用性的单一电动汽车路由问题引入了一个动态决策程序。对于一个给定的仅有客户的路线,插入充电站的计算复杂性以前还没有被确定。然而 , 该问题极有可能是强意义上的 NP - hard , 因为插入问题类似于资源约束的最短路径问题 , 其目的是在满足资源约束的情况下找到一条从源头到目的地的最小成本导向路径 ( Horv ́ ath & Kis, 2016; Strehler 等人 , 2017 ) 。
6.数据集
最广泛使用的EVRP数据集是由Schneider等人引入的。(2014),由小型和大型的实例组成,最多有100个客户位置。所有这些实例都是根据Solomon(1987)的VRPTW的基准数据集生成的。VRPTW数据集根据地理分布分为三类:随机客户分布(R),聚类客户分布(C),以及R和C两类的混合物(RC)。此外,就调度范围而言,这些类别被分为两组,其中R1、C1和RC1组成第一组,调度范围较短,而R2、C2和RC2组成第二组,调度范围较长。基于VRPTW实例,Schneider et al.(2014)提出了一组56个大尺寸实例,包括100个客户地点和21个充电站,以及一组36个小尺寸实例,包括5、10和15个客户地点。每个实例中的充电站确定如下。其中一个充电站位于仓库节点。其余的充电站是随机分布的,假设每个客户最多可以使用两个充电站从仓库到达。另一方面,电动汽车的电池容量是通过考虑以下两个值的最大值来确定的:该实例的最知名的VRPTW解决方案的平均路线长度的60%所需的充电,以及客户和车站之间最长弧线距离所需充电的两倍。最后,使用Solomon(1987)中描述的程序重新生成时间窗口数据以获得可行的实例。
许多解决方案程序都使用Schneider等人介绍的EVRPTW数据集。(2014)。因此,本节还介绍了现有研究中实例的最佳解决方案,并比较了不同解决方案的解决质量。表8显示了基于Schneider等人研究的小型实例的现有结果。(2014),Küçükŏglu和Oztürk(2016),以及Schiffer和Walter(2017)。Schneider等人(2014)将他们提出的VNS/TS算法与CPLEX在两小时内获得的精确解进行了比较。Küçükŏglu和Oztürk(2016)以及Schiffer和Walther(2017)提出的另外两项研究分别介绍了CPLEX和GUROBI求解器获得的最优解。根据表8所示的精确求解结果,每项研究都为大多数实例找到了相同的解决方案。然而,Küçükŏglu和Oztürk(2016)提出的结果通过使用更好的公式,以更短的CPU时间获得了最小平均目标函数值。另一方面,VNS/TS能够在更短的处理时间内获得与精确解算器的最优解相同的结果或优于精确解算机的最优界整数解。
对于大尺寸的实例,表9显示了七种不同的解决方法的结果,并列出了每个实例的最佳解决方案。应该注意的是,对于这个表,Schneider等人提出的EVRPTW的第一个目标。(2014)是为了最小化路线所使用的电动汽车总数。次要目标是最小化电动汽车的总行驶距离。因此,一个路线数量较少的解决方案可以被确定为比另一个总旅行距离较小的解决方案更好的解决方案。关于解决方案的质量,与其他六种解决方案方法相比,Goeke和Schneider(2015)提出的ALNS算法是最好的算法。除了表9中显示的结果外,Schiffer和Walther(2018a)以及Kancharla和Ramadurai(2018)为EVRPTW建立了较短的距离。然而,这些结果在本研究中没有被考虑在内,因为作者没有给出用于路线的电动汽车总数。
关于CPU时间,由于计算是在表10中给出的不同技术环境中进行的,因此很难在算法之间进行公平的比较。Hiermann等人提出的分支和价格算法的计算。(2016)在8小时的时间限制下进行,对于大多数情况,结果是在时间限制结束时获得的。对于其他算法,除了Goeke和Schneider(2015)提出的ALNS算法外,平均CPU时间相似,该算法优于
上面提到的EVRPTW的计算及其结果都考虑了车站充电操作的完全充电政策。一些论文讨论了应用于Schneider等人的问题数据集的部分收费政策。(2014)来测试他们的方法。由于部分充电对电动汽车来说需要比完全充电更少的操作时间,所以EVRPTW的问题数据集可以使用,没有任何问题。按照部分收费政策,Keskin和Çatay(2016)通过使用具有两小时时间限制的CPLEX,为小型EVRPTW实例提出了33个最优解决方案。此外,作者将他们的ALNS算法应用于小型和大型实例,并报告说与EVRPTW解决方案相比,总距离平均节省了1.64%。此外,在一些实例中观察到使用的电动汽车数量减少。Schiffer和Walther(2017)对带有部分电荷的小尺寸EVRPTW也发现了类似的结果。然而,他们能够获得32个实例的最优解,尽管平均CPU时间较高。作者还扩展了Schneider等人的数据集。(2014)为EVRP的另一个扩展版本,称为带时间窗口和部分充电的稳健电动定位路由问题(Schiffer和Walther,2018a;Schiffer和Walther,2018b)。这个数据集被用于Schiffer等人的另一项研究中。(2018)来测试为有路线内设施的位置路由问题引入的ALNS。
Schneider等人的数据集。(2014)也被用于具有异质车队的EVRPTW。对于这个扩展,Hiermann等人。(2014)和Hiermann等人。(2016)通过使用Liu和Shen(1999)对有时间窗口的混合车辆路由问题定义的实例集,将不同的电动汽车类型纳入问题数据,修改了原始实例。Küçüko ̆ glu和̈ Oztürk(2016)也考虑了同样的扩展。作者通过使用八种不同电动汽车的真实技术信息修改了原始的小尺寸EVRPTW数据集。根据他们用CPLEX得到的计算结果,使用异质车队可以获得总距离平均减少5.55%。Desaulniers等人。(2016)修改了Schneider等人的数据集。(2014)为他们提出的EVRPTW的四个变体,在上一节中进行了描述。作者介绍了由分支价格和切割算法解决的问题的详细解决方案。
与Schneider等人的EVRPTW数据集不同。(2014),一些研究人员为所考虑的EVRP问题形成了自己的数据集。例如,Felipe等人(2014)生成了一个新的问题集,该问题集由具有多种技术和部分充电的EVRP的60个实例组成,其中客户数量在100到400之间变化,并且随机分布,地理分布均匀。Goeke和Schneider(2015)将Demir等人提出的数据集。(2012)针对污染路线问题,将其改编为电动和传统车辆混合车队的路线问题。修改后的数据集由九个实例集组成,根据问题大小进行分组,问题大小在10到200个客户之间变化,每个实例集包含20个实例。S.Zhang等人(2018)介绍了EVRP的40个实例,其中研究的目标是电动汽车的能量最小化,而不是距离最小化。Yang和Sun(2015)通过假设所有节点都是候选电池交换站,将四个众所周知的有容量车辆路由问题数据集用于电池交换站的位置和路由问题。Hof等人也使用了这些问题。(2017)。基于电池交换技术,Jie等人(2019)介绍了一个新的两级电容电动汽车路径问题数据集。Roberti和Wen(2016)介绍了另一个有用的数据集,用于带时间窗口的电动旅行推销员问题,以测试他们的GVNS算法。作者生成了两组测试问题,其中第一组由50个具有20个客户位置的小型实例组成,第二组由具有150个和200个客户地点的50个大型实例组成。此外,根据问题中充电站的数量(5和10),每组被划分为两个子集。小型和大型实例分别来自Gendreau等人提出的带有时间窗口实例的旅行推销员问题。(1998)和Ohlmann和Thomas(2007)。所提出的GVNS在数据集上用完全和部分收费策略进行了测试。Hof等人(2017)和Montoya等人(2017。作为最近的研究之一,Karakati c(2021)扩展了Cordeau等人提出的数据集。(2001)为多站点EVRPTW增加了每个实例的充电站,其中每个充电站具有相同的充电速度。
7.结论和未来的研究方向
在本研究中,我们对EVRP的现有研究进行了全面和最新的综述。仅从电动汽车路线来看,我们就分析了136篇不同的论文,包括期刊论文、会议记录、技术报告和论文。我们从不同方面对这些研究进行了讨论。给出了EVRP的数学公式及其基本变体,介绍了最成功的求解方法,总结了EVRP有用的问题数据集,并讨论了比较几种成功方法的计算测试。考虑到目前对EVRP的研究,可以表达以下结论和未来的研究方向:
-1.与传统的车辆路由问题一样,大多数与EVRP相关的研究旨在最小化基于距离的性能指标,而少数研究则考虑到了总消耗的能量或使用的充电站数量。随着人们对绿色物流概念的兴趣越来越大,与消耗的能源或充电操作更相关的目标函数也有兴趣在EVRP中进行研究。然而,在实践中,一家物流公司主要关注的是底线。因此,大多数应用中的现实目标是最小化总成本,其中包括能源使用、司机成本和车辆成本。能源使用是距离、速度、车辆负荷和车辆类型的一个函数。司机的成本取决于总的路线持续时间,应特别注意可能的加班成本。车辆成本可以在一个主要目标中解决,即最小化车辆数量或最小化特定类型车辆的加权数量。另外,车辆成本可以表示为折旧,它是距离和车辆类型的一个函数。这些目标可以合并为一个以货币表示的单一目标。
2. 在几乎所有的工作中,电动汽车在给定距离内消耗的能量是通过使用每距离单位的恒定能量使用来确定的。然而,在现实驾驶条件下,电动汽车的能量消耗量受到不同条件的影响,例如道路条件、交通条件、天气条件、驾驶员性能、地形和车辆负载。因此,应考虑这些条件,以便为路线规划获得更现实的结果。此外,在下坡或制动时能量的再生是可能的,并且应该考虑到这一点。此外,可以分析电动车辆的供暖或空调系统相对于天气条件的能量使用。由于优化算法会优化到极限,一些路线在到达充电站或停车场时,电池电量将接近零。因此,忽略或过于简化能源消耗方面很有可能导致在实践中不可行的路线。由于在大规模应用中准确地对能源使用进行建模是不切实际的,因此在简化某些方面时,研究这种不可行性何时出现可能会很有趣。然后,这可以用于根据EVRP实例类型甚至路由特性来确定电池上的安全缓冲区。