前面的文章讲完了一阶惯性环节的性能,主要对其相幅特性进行了分析,我们得到了几个关键的结论。既然一阶都做了,二阶其实更通用,我们电机控制的电流环实际上就是一个二阶系统(典型一型环节即为二阶系统),那么这篇文章主要就针对二阶系统进行分析和实现证明。
1 二阶系统的传递函数
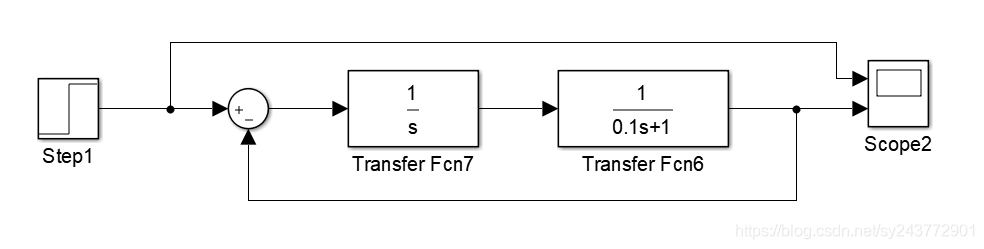
二阶系统的传递函数框图如下,这里我设计的是一个积分环节和一个一阶惯性环节,这么设计的原因是因为电机内电流环实际就是一个类似的传递函数。其实这里与前面一篇文章的一阶惯性环节的区别就是加了一个积分环节,在自动控制原理这门课里面讲到过系统阶层的定义标准,在此不再赘述。那么这个系统到底效果如何呢,对开环传函的相幅特性进行分析。

上图所示的二阶系统的开环传函的相幅特性如下图所示,与一阶惯性环节存在一下三个区别:
1、幅频特性初始斜率为-20dB,这是因为存在积分环节的原因,如图中1点所示。
2、相频特性初始值为-90°,这同样是存在积分环节导致,积分环节会使得系统天生之后90°,相频曲线的最大值变为-180°。
3、截止频率不再为转折频率,如图中2点出所示,此时截止频率为1。(这个好像不算区别哈,只是这里过0轴更明显了)

这个系统的性能如何呢,大部分的系统要从两个角度分析:
1:截止频率(三阶系统讨论中频带宽):当前系统截止频率为1,对高频信号跟随效果较差,因为我随便弄的嘛。截止频率低意味着系统的响应速度较慢,但是对高频噪声过滤效果郝。
2:相位裕度(相位裕度为负值系统不稳定):截止频率处的相位+180°等于相位裕度。截止频率处的相位为-100°左右,那么相位裕度则有80°,还是相当不错的。
那么在更改一下转折频率和更改开环增益来看看相幅特性的效果。
更改开环增益后的相幅特性结果:K =1 、10、100。可以看到开环增益增加后,幅频特性曲线上移,相频特性曲线不变,截止频率相应增大,系统响应速度加快。截止频率增大,相位裕度减小,系统稳定性下降。

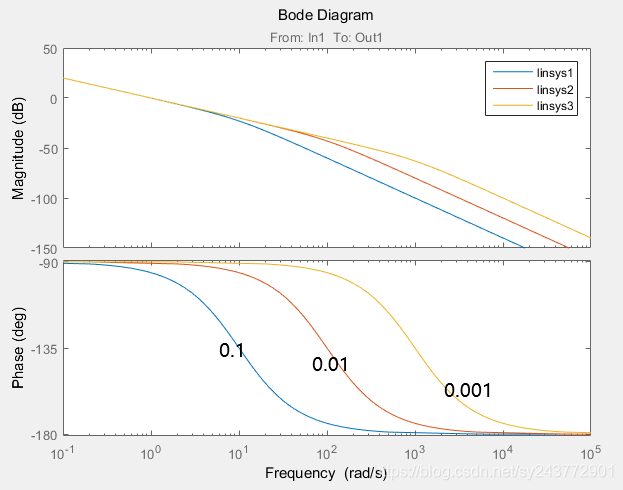
更改转折频率后相幅特性结果:s前的系数分别为0.1、0.01、0.001。可以看到开s前系数减小后,转折频率增大,幅频特性的拐点滞后,相频特性右移。截止频率不变,快速性不变,相位裕度增大,系统稳定性增强。
2 二阶系统的阶跃响应效果
上面已经分析完了开环传函的相幅曲线,那么现在看看闭上环之后的输入输出响应效果。
电流环的输入一般是一个阶跃信号,那么我们就看看这个系统的阶跃响应效果如何。图中红色曲线为给定信号,蓝色为输出信号。从仿真结果可以看出,此时系统需要5s时间才能够实现跟随,系统是稳定的,但是系统的响应速度较慢。

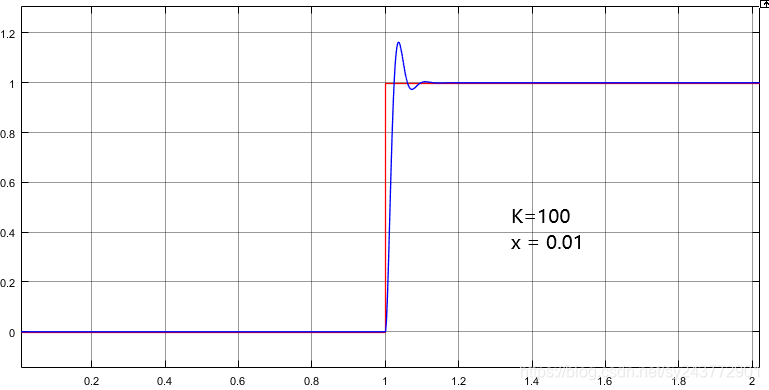
上述系统需要增大开环增益,那么试试 K= 100。此时系统的在2秒就实现了跟随,但是有明显的超调,并且存在震荡问题。证

明此时系统的响应速度是足够的,但是相位裕度不够,减小x看看效果。试试x = 0.01时候的效果。可以看到系统在0.1s就实现了输入的跟随,并且超调较小且没有任何振荡。
小结:
从本文的分析可以学到以下东西:
1、二阶系统的幅频特性以及开环增益和s前系数对相幅特性的影响
2、截止频率决定了系统响应速度,而相位裕度决定了系统的稳定性。
3、开环增益决定系统的截止频率,s前系数x决定了截止频率处相位裕度的大小。
整理不易,希望大家帮忙点个赞呀~谢谢啦~^_^
参数整定以及自动控制原理系列文章:
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)(一)
如何用matlab画bode图——自动控制原理基础补充(一)
二阶系统的性能分析(开环相幅和阶跃响应)——自动控制原理基础补充(三)
转速环PI参数整定详解(二)——转速环各个环节传递函数的来源
转速环PI参数整定详解(三)——转速环开环传函特性及其整定策略