2020-5-28-3.6节静态误差系数法
文章目录
0. 概述
- 稳态性能:控制系统的另一个重要特性。
- 稳态性能的评价:根据系统在阶跃、斜坡、加速度等输入信号作用下引起的静态误差来评价。
- 稳态误差:控制系统控制准确度(即控制精度)的一种度量。
1. 误差和稳态误差
- 开环传递函数:前向通路传递函数乘以反馈通路传递函数。一般用 G k ( s ) G_{k}(s) Gk(s)表示。
1.1 误差和稳态误差
1.1.1 误差的两种定义
- 从输出端定义
-
系统误差:被控量(输出量)希望值 c r ( t ) c_{r}(t) cr(t)与其实际值 c ( t ) c(t) c(t)之差
e ′ = c r ( t ) − c ( t ) e^{'}=c_{r}(t)-c(t) e′=cr(t)−c(t)
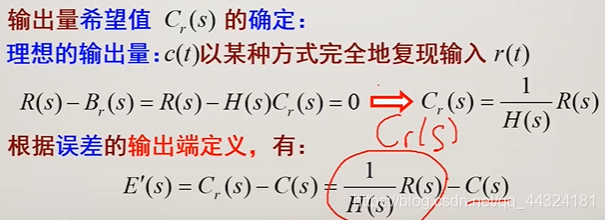
-
缺点:实际系统中有时无法测量,一般只有数学意义。
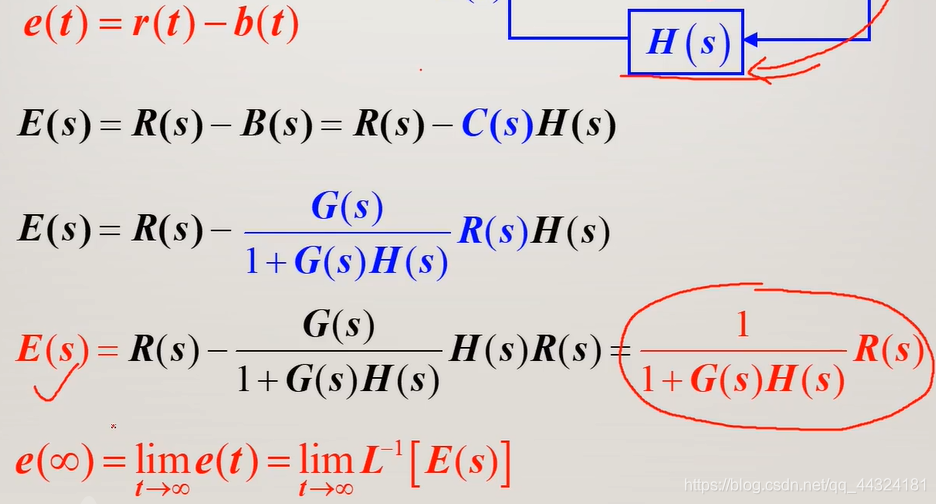
- 从输入端定义
- 系统误差:系统的输入 r ( t ) r(t) r(t)与系统主反馈信号 b ( t ) b(t) b(t)之差。
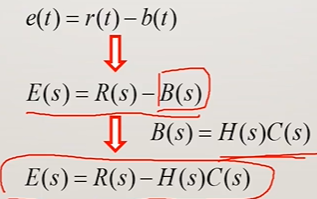
- 优点:在实际系统中可以测量,具有一定的物理意义。
- 缺点:有时不复合工程上的提法和要求。
1.1.2 误差的两种定义之间的关系
- 当系统为单位反馈时: E ′ ( s ) = E ( s ) E^{'}(s)=E(s) E′(s)=E(s).
- 非单位反馈则有: E ′ ( s ) = 1 H ( s ) E ( s ) E^{'}(s)=\frac{1}{H(s)}E(s) E′(s)=H(s)1E(s)或 E ( s ) = H ( s ) E ′ ( s ) E(s)=H(s)E^{'}(s) E(s)=H(s)E′(s).
- 以后均采用输入端定义的误差来讨论。
问:采用输入端定义的误差来分析系统准确性,请问某一时刻的误差大是否就能说明控制系统控制的不准确。
答:不能说明。
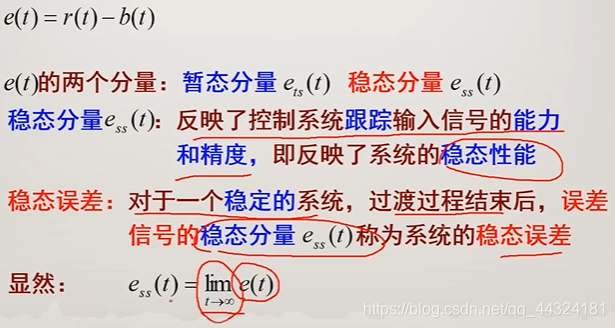
1.1.3 稳态误差的定义
e s s ( t ) = e_{ss}(t)= ess(t)=
2. 稳态误差的计算
2.1 根据定义计算
问:定义发求稳态误差并不适用,主要原因是?
答:拉式反变换求 e ( t ) e(t) e(t)的计算量太大。
2.2 根据终值定理计算
- 拉普拉斯变换的终值定理:
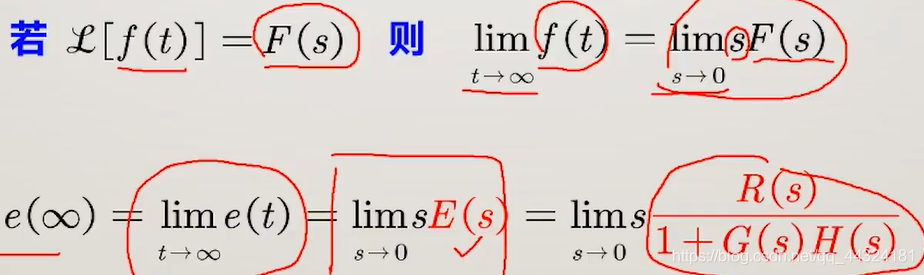
- 稳态误差的计算公式:

- 将开环传递函数写成典型环节的形式,如下:
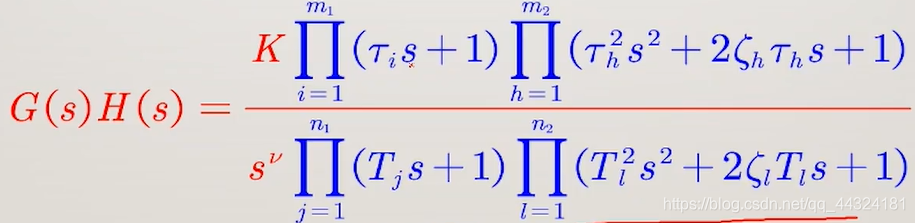
其中,
K : 开 环 增 益 ν : 积 分 环 节 的 个 数 K:开环增益\\ \nu:积分环节的个数 K:开环增益ν:积分环节的个数
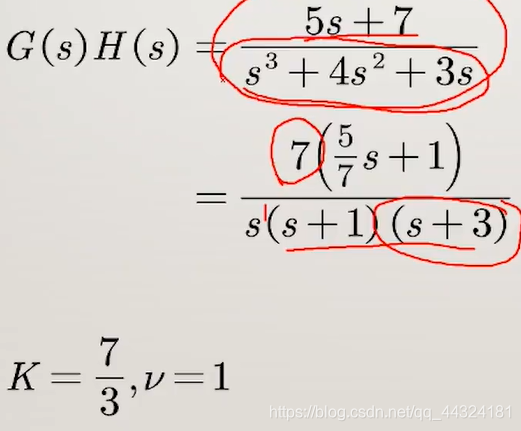
例题(开环传递函数)
- 例1
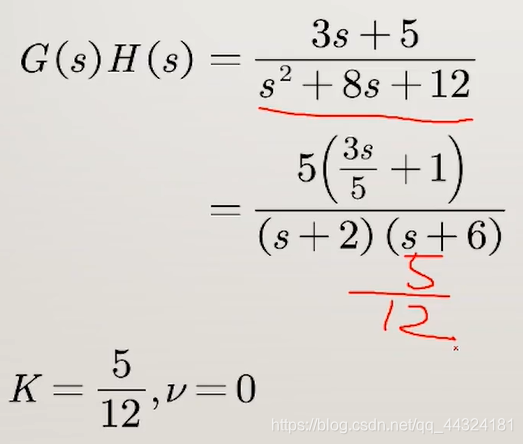
- 例2
- 例3

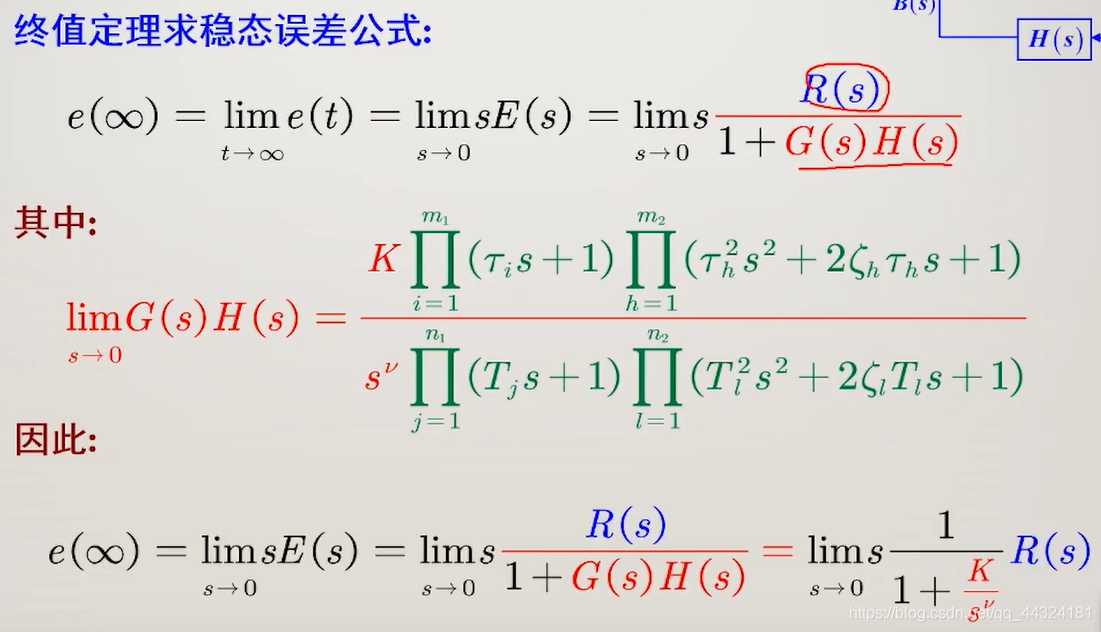
- 因此,系统稳态误差与输入信号 R ( s ) R(s) R(s)、开环增益 K K K和积分环节数目 ν \nu ν有关。
问:你认为输入信号 R ( s ) R(s) R(s)、开环增益 K K K和积分环节数目 ν \nu ν哪个更能本质地影响系统的稳态误差?
答:积分环节数目 ν \nu ν。
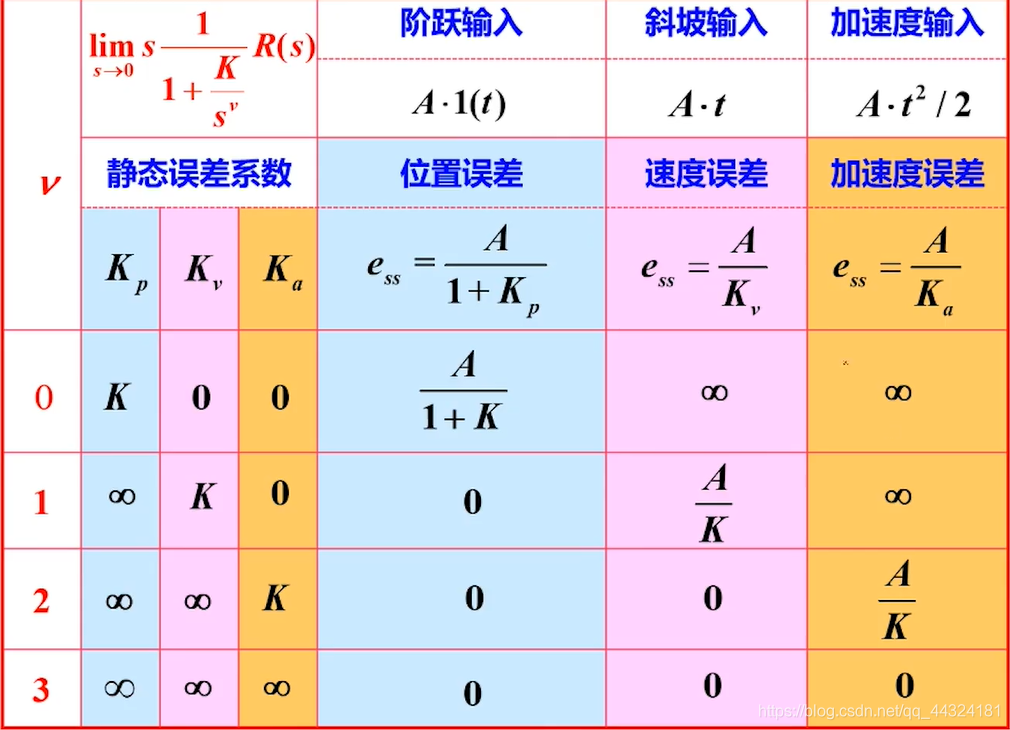
2.3 静态误差系数法
2.3.0 系统的型的概念
- 根据系统开环传递函数中积分环节数目 ν \nu ν把系统分为:
- ν = 0 \nu=0 ν=0时,为0型系统;
- ν = 1 \nu=1 ν=1时,为I型系统;
- ν = 2 \nu=2 ν=2时,为II型系统。
2.3.1 阶跃输入
- 当系统输入为阶跃信号 A ⋅ 1 ( t ) A\cdot1(t) A⋅1(t)时,即 R ( s ) = A s R(s)=\frac{A}{s} R(s)=sA时,稳态误差(终值) e ( ∞ ) e(\infty) e(∞)为:
e ( ∞ ) = l i m s → 0 s 1 1 + G ( s ) H ( s ) R ( s ) = A 1 + l i m s → 0 K s ν e(\infty)=lim_{s \to 0}s\frac{1}{1+G(s)H(s)}R(s)\\ = \frac{A}{1+lim_{s \to 0} \frac{K}{s^{\nu}}} e(∞)=lims→0s1+G(s)H(s)1R(s)=1+lims→0sνKA
静态位置误差系数定义: K p = l i m s → 0 G ( s ) H ( s ) = l i m s → 0 K s ν K_{p}=lim_{s \to 0}G(s)H(s)=lim_{s \to 0}\frac{K}{s^\nu} Kp=lims→0G(s)H(s)=lims→0sνK。 - 则稳态误差为
e ( ∞ ) = A 1 + K p e(\infty)=\frac{A}{1+K_{p}} e(∞)=1+KpA
2.3.2 斜坡信号
- 当系统输入为斜坡信号 A ⋅ t A\cdot t A⋅t时,即 R ( s ) = A s 2 R(s)=\frac{A}{s^2} R(s)=s2A时,稳态误差(终值)为
e ( ∞ ) = A l i m s → 0 s G ( s ) H ( s ) = A l i m s → 0 K s ν − 1 e(\infty)=\frac{A}{lim_{s \to 0}sG(s)H(s)} \\ =\frac{A}{lim_{s \to 0}\frac{K}{s^{\nu-1}}} e(∞)=lims→0sG(s)H(s)A=lims→0sν−1KA - 静态速度误差系数定义: K v = l i m s → 0 s G ( s ) H ( s ) = l i m s → 0 K s ν − 1 K_{v}=lim_{s \to 0}sG(s)H(s)=lim_{s \to 0}\frac{K}{s^{\nu-1}} Kv=lims→0sG(s)H(s)=lims→0sν−1K。
- 则稳态误差为
e ( ∞ ) = A K v e(\infty)=\frac{A}{K_{v}} e(∞)=KvA

2.3.3 加速度输入
- 输入加速度信号:
r ( t ) = 1 2 A t 2 R ( s ) = A s 3 r(t)=\frac{1}{2}At^2\\ R(s)=\frac{A}{s^3} r(t)=21At2R(s)=s3A - 稳态误差为:
e ( ∞ ) = A l i m s → 0 s 2 G ( s ) H ( s ) = A l i m s → 0 K s ν − 2 e(\infty)=\frac{A}{lim_{s \to 0} s^2G(s)H(s)}\\ = \frac{A}{lim_{s \to 0} \frac{K}{s^{\nu-2}}} e(∞)=lims→0s2G(s)H(s)A=lims→0sν−2KA - 静态加速度误差系数定义: K a = l i m s → 0 s G ( s ) H ( s ) = l i m s → 0 K s ν − 2 K_{a}=lim_{s \to 0}sG(s)H(s)=lim_{s \to 0}\frac{K}{s^{\nu-2}} Ka=lims→0sG(s)H(s)=lims→0sν−2K
- 则稳态误差为:
e ( ∞ ) = A K a e(\infty)=\frac{A}{K_{a}} e(∞)=KaA
2.3.4 静态误差系数法总结
- 误差系数的扩展
- 误差结果的扩展
- 工程实践的指导意义
- 无静差跟踪
- 至少有1个积分环节才能对阶跃信号(0阶信号)实现无静差跟踪;
- 至少有2个积分环节才能对斜坡信号(1阶信号)实现无静差跟踪;
- 至少有3个积分环节才能对加速度信号(2阶信号)实现无静差跟踪;
- ……
- 至少有 n + 1 n+1 n+1个积分环节才能对加( n n n阶信号)实现无静差跟踪。
- 无静差跟踪
下一篇:典型环节的频率特性